|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese
ENCYKLOPEDIA RADIOELEKTRONIKI I INŻYNIERII ELEKTRYCZNEJ Lokalizator akustyczny do samochodu. Encyklopedia elektroniki radiowej i elektrotechniki
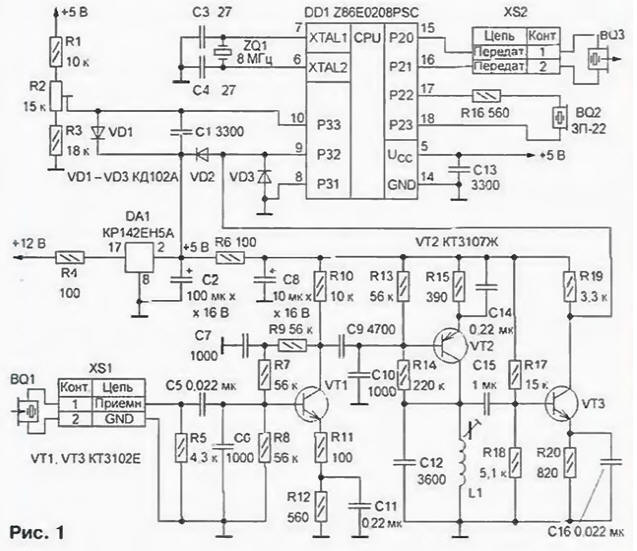
Encyklopedia radioelektroniki i elektrotechniki / Samochód. Urządzenia elektryczne Jadąc tyłem, kierowca samochodu nie widzi określonego obszaru przestrzeni drogowej. Strefa ta ma długość do dwóch metrów i mogą w niej przebywać ludzie lub zwierzęta, a także przedmioty utrudniające ruch. Osiągnięcia współczesnej technologii pozwalają na stworzenie specjalnych urządzeń do obserwacji określonej przestrzeni i informowania kierowcy o napotkaniu jakichkolwiek obiektów na drodze samochodu. Najbardziej optymalnie ten problem rozwiązuje się za pomocą pulsacyjnej lokalizacji akustycznej. Znane są udane próby zbudowania takich urządzeń (patrz np. książka Siga X., Mizutani S. „Wprowadzenie do elektroniki samochodowej”. - M.: Mir, 1989). Jednak ze względu na złożoność i wysokie koszty lokalizatory te nie były jeszcze szeroko stosowane. Oferowany czytnikom lokalizator akustyczny oparty jest na mikrokontrolerze Z8. Jest prosty, wygodny do powtórzenia przez radioamatorów. Przy odpowiednim dopracowaniu programu i konstrukcji może służyć jako niezastąpiony pomocnik dla niewidomych, urządzenia zabezpieczające, przenośna echosonda dla wędkarza-amatora, bezdotykowy płynowskaz itp. Schemat ideowy lokalizatora przedstawiono na rys. 1. Jego podstawą jest mikrokontroler (MK) Z86E0208PSC (DD1).
Zewnętrzny obwód taktowania MK składa się z rezonatora kwarcowego ZQ1 o częstotliwości 8 MHz i kondensatorów C3. C4. Emiter ultradźwiękowy BQ3 jest podłączony bezpośrednio do pinów portu P2 MK. Amplituda napięcia wzbudzenia na wejściu emitera wynosi 10 V. Czas trwania ciągu impulsów wynosi 1 ms. Odbity sygnał odbierany przez odbiornik ultradźwiękowy BQ1 jest podawany na wejście trójstopniowego wzmacniacza rezonansowego wykonanego na tranzystorach VT1-VT3. Z jego wyjścia sygnał o stałej składowej 2.5 V jest podawany na wejście nieodwracające (P32) wbudowanego komparatora MK. Przykładowe napięcie 2.7 V podawane jest na wejście odwracające komparatora (RZZ) z dzielnika R1R3. co zapewnia wybór użytecznego sygnału odbitego na poziomie odbieranych zakłóceń. Obwód napięcia odniesienia jest dodatkowo zabezpieczony przed zakłóceniami przez diodę ograniczającą VD1 i kondensator C1. Diody VD2 i VD3 ograniczają chwilową wartość odbitego sygnału do poziomów 0 i 5 V. Sygnał dźwiękowy ostrzegający kierowcę o obecności przeszkody w strefie niewidocznej jest generowany przez emiter piezoelektryczny BQ2. podłączony przez rezystor R16 bezpośrednio do pinów portu P2 MK. Lokalizator zasilany jest napięciem 12 ± 2.5 V z przeznaczeniem do świateł cofania samochodu. Chip DA1 stabilizuje napięcie zasilania na poziomie 5 V, niezbędnym do normalnej pracy MK. W obwodzie zasilania urządzenia zainstalowany jest filtr składający się z kondensatorów C2, C8, C13 i rezystora R6. Zasada działania lokalizatora polega na emisji serii impulsów o częstotliwości ultradźwiękowej i późniejszym odbiorze sygnału odbitego od przeszkody. Czas od momentu emisji do momentu odbioru odbitego sygnału jest wprost proporcjonalny do odległości od obiektu. W zależności od odległości lokalizator generuje jeden z dwóch dźwięków ostrzegawczych: jeśli jest mniejsza niż 1 m, generowane są częste impulsy tonowe, jeśli od 1 do 2 m - rzadko. W odległości większej niż 2 m nie ma sygnału dźwiękowego. Czas oczekiwania odbitego sygnału wynosi 60 ms, po czym emitowany jest kolejny impuls impulsów i proces jest powtarzany. Działanie urządzenia dokładniej wyjaśnia wykres [1], pokazany na rys. 2 Obejmuje cztery wierzchołki - stany: SEND (TRANSFER) - utworzenie ultradźwiękowego impulsu impulsów; PRESS (SUPPRESSION) - tłumienie emitera podźwięku; WAIT (WAITING) - oczekiwanie na odbity sygnał i COUNT (CALCULATION) - obliczenie odległości do obiektu.
Przejścia między stanami, pokazane łukami wykresu, spowodowane są następującymi zdarzeniami bezpośrednimi (oznaczone jedną literą) i pośrednimi (dwie litery zgodnie z przejściem): t (timer - timer) - działanie timera MK , c (comparator - komparator) - działanie komparatora MK, ws (wait - send) - koniec oczekiwania na odbity sygnał, cs (count - send) - koniec obliczania odległości do obiektu i pw (naciśnij - czekać) - koniec odliczania czasu tłumienia. Po włączeniu zasilania urządzenie automatycznie resetuje się i inicjowany jest stan SEND. Główną funkcją tego stanu jest umożliwienie powstania impulsu ultradźwiękowego o czasie trwania 1 ms. Po wyzwoleniu timer MK wprowadza urządzenie w stan PRESS, w którym nie reaguje na odebrany odbity sygnał. Czas przebywania w tym stanie jest określony liczbą operacji timera, która może być zmieniana w zależności od rodzaju zastosowanej głowicy ultradźwiękowej. Po zakończeniu odliczania czasu tłumienia, kolejna operacja timera wprowadza urządzenie w stan OCZEKIWANIA. W stanie WAIT lokalizator czeka na nadejście użytecznego sygnału odbitego, który wyzwala komparator MC. zapamiętywanie czasu od wysłania do odebrania użytecznego sygnału i przejścia do stanu LICZNIK. Proces odliczania czasu w stanie WAIT jest synchronizowany przez działanie timera MK co milisekundę. Jeśli po 60 ms w tym stanie komparator MK nie zadziała, urządzenie ponownie przejdzie do stanu SEND. Kiedy komparator odpala, przechodzi w stan COUNT. W stanie COUNT lokalizator kontynuuje odliczanie przedziału czasu 60 ms. Następnie na podstawie wcześniej zarejestrowanego czasu od momentu wysłania do momentu odebrania sygnału obliczana jest odległość do obiektu. Zgodnie z wynikiem obliczeń urządzenie kontroluje emisję sygnału dźwiękowego z wymaganym interwałem „sygnał-pauza”. Po zakończeniu obliczeń przechodzi w stan WYŚLIJ. Ponadto cykl działania jest powtarzany.W lokalizatorze można zastosować dowolne kondensatory ceramiczne i tlenkowe o niewielkich rozmiarach. Cewka L1 jest nawinięta na zunifikowanej jednoczęściowej ramie o średnicy 8 i długości odcinka uzwojenia 7 mm. Trymer - ferryt (100НН) o średnicy 2,8 i długości 12 mm. Cewka zawiera 860 zwojów, nawiniętych zwój na zwój drutem PEL 0,15 (indukcyjność 4.4 mH). Rezystor R2 - SP5-2 lub dowolny inny mały trymer wieloobrotowy. Piezoceramiczny emiter dźwięku BQ2 - ЗП-22 lub podobny. Tranzystory VT1. VT3 - dowolna z serii KT3102. VT2 - dowolna z serii KT3107. Nadajnik ultradźwiękowy BQ3 i odbiornik BQ1 są identyczne. W wersji autorskiej zastosowano przetworniki ultradźwiękowe z produkowanego przez przemysł urządzenia zabezpieczającego Echo-2; możliwe jest zastosowanie dowolnych odpowiednich przetworników piezoceramicznych, w tym wykonanych samodzielnie, o tych samych częstotliwościach roboczych w zakresie 36... 38 kHz [2]. Do ich podłączenia służą importowane złącza DJK (ich gniazda DJK-2MR są zainstalowane na płytce, a kable połączeniowe dostarczane są z wtykami DJK-2F). Kody „firmware” ROM MK są pokazane w tabeli. Ilość kodu programu to 242 bajty.
Strukturalnie lokalizator składa się z jednostki elektronicznej oraz nadajnika i odbiornika o tej samej konstrukcji. 3.
Tablica jest umieszczona w plastikowej obudowie od projektanta radiowego „Urządzenie komunikacyjne” wyprodukowanego przez JSC „Nowgorodski Zakład Budowy Maszyn”. Wygląd zmontowanego lokalizatora pokazano na rys. 4.
Aby zmniejszyć oddziaływanie akustyczne emitera na odbiornik ultradźwięków, ich ścieżki akustyczne wykonane są w postaci rogów. Dodatkowo tuba dopasowuje stosunkowo wysoką impedancję przetwornika do stosunkowo niskiej impedancji obciążenia, czyli powietrza (3). Najskuteczniejszy róg wykładniczy, którego pole przekroju zmienia się zgodnie z prawem S \u0d S0em, gdzie S jest polem przekroju rogu w odległości x od przetwornika , S0 to powierzchnia wlotu tuby (przy x \u35d 0,17), tj. pole powierzchni przetwornika, m to współczynnik rozszerzalności tuby, który zależy od częstotliwości roboczej ( dla 1 kHz, m = XNUMX mm-XNUMX). W domu najłatwiej jest zrobić róg, którego przekrój ma kształt koła. Wiedząc, że pole koła wynosi πD2/4, oblicz średnicę tuby korzystając z powyższego wzoru dla różnych odległości x od przetwornika (x można ograniczyć do 15...20 mm). Następnie na podstawie uzyskanych wartości rysuje się na papierze przekrój podłużny rogu i wykonuje się szablon z grubej tektury lub cyny. Same rogi są wykonane przy użyciu tego szablonu ze sztywnej pianki. Powierzchnie gotowych rogów pokrywane są farbą w celu nadania im lepszych właściwości akustycznych. W celu ochrony przed działaniem czynników atmosferycznych klaksony umieszczone są w osłonach ochronnych wyposażonych w uchwyty do montażu na tylnym zderzaku samochodu. Wygodne jest stosowanie plastikowych puszek instalacyjnych jako obudów. Wsporniki wykonane są z blachy stalowej. Szczeliny między obudową a tubą wypełnione są żywicą epoksydową, a cała konstrukcja pokryta jest kilkoma warstwami syntetycznej emalii odpornej na warunki atmosferyczne. Założenie urządzenia rozpoczyna się od sprawdzenia instalacji pod kątem solidnych połączeń i braku zwarć. Przed zainstalowaniem MK wskazane jest sprawdzenie działania stabilizatora napięcia i wzmacniacza sygnału ultradźwiękowego. W tym celu należy podłączyć zasilanie i zmierzyć napięcie na pinie 5 panelu MK. Powinien mieścić się w granicach 5 ± 0.3 V. Następnie zmierzyć stałe napięcie na zacisku 9 panelu MK (2.5 V ± 10%) i. podłączając woltomierz do jego wyjścia 10. ustaw napięcie o 2 ... 0.2 V więcej niż pierwsze z rezystorem przycinającym R0.3. Ponadto, podłączając wejście oscyloskopu do zacisku 9 panelu MK i podając sygnał sinusoidalny o częstotliwości 37 kHz i amplitudzie 3 mV na wejście wzmacniacza, obserwuje się sygnał o amplitudzie 4.5 V na ekranie oscyloskopu Regulując indukcyjność cewki L1, uzyskuje się maksymalne wzmocnienie przy określonej częstotliwości. Następnie, przy wyłączonym zasilaniu, w panelu instaluje się wstępnie zaprogramowany MC, a urządzenie łączy się z nadajnikiem i odbiornikiem. Jeśli urządzenie nie działa po włączeniu zasilania, podłącz wejście oscyloskopu (o rezystancji wejściowej co najmniej 10 MΩ) do zacisku XTAL2 (pin 6) mikroukładu DD1 i sprawdź, czy generator zegara MK jest wzbudzony. Brak oscylacji przebiegu sinusoidalnego o częstotliwości 8 MHz wskazuje, że generator nie jest samowzbudny. W takim przypadku należy sprawdzić rezonator kwarcowy ZQ1 oraz kondensatory C3 i C4. Po zamontowaniu na samochodzie lokalizator zostanie umieszczony w kabinie pasażerskiej, a przetworniki ultradźwiękowe na tylnym zderzaku w odległości co najmniej 0.6 m od siebie. Ta odległość zapewnia szerokość obszaru roboczego lokalizatora równą 2 m. Zmieniając ją. Możesz także dostosować szerokość tej strefy. literatura
Autor: M.Gladstein, M.Sharov
Maszyna do przerzedzania kwiatów w ogrodach
02.05.2024 Zaawansowany mikroskop na podczerwień
02.05.2024 Pułapka powietrzna na owady
01.05.2024
▪ Najlepsze wykorzystanie elastycznego ekranu ▪ 24-bitowy 256-kanałowy ADC dla tomografów ADAS1131 ▪ Megabateria Tesla Megapack 1,5 MW ▪ Rękopisy znad Morza Martwego
▪ część serwisu Elektryk w domu. Wybór artykułów ▪ artykuł Seria magicznych zmian w uroczej twarzy. Popularne wyrażenie ▪ artykuł Czy drewno działa jak filtr powietrza? Szczegółowa odpowiedź ▪ Artykuł Jedzenie na pustyni. Wskazówki podróżnicze ▪ artykuł Tajemnicze karty. Sekret ostrości
Strona główna | biblioteka | Artykuły | Mapa stony | Recenzje witryn
www.diagram.com.ua |




 Zostaw swój komentarz do tego artykułu:
Zostaw swój komentarz do tego artykułu: