|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese
ENCYKLOPEDIA RADIOELEKTRONIKI I INŻYNIERII ELEKTRYCZNEJ Proporcjonalne sterowanie wentylatorem chłodzącym silnik samochodu. Encyklopedia elektroniki radiowej i elektrotechniki
Encyklopedia radioelektroniki i elektrotechniki / Samochód. Urządzenia elektryczne Proponowane urządzenie pozwala na przejście z przekaźnikowej zasady sterowania wentylatorem układu chłodzenia silnika „temperatura powyżej normy – włączony, poniżej normy – wyłączony” na sterowanie proporcjonalne, co zdaniem autora jest korzystniejsze dla silnika. Teraz, gdy temperatura płynu chłodzącego wzrasta, prędkość wirnika wentylatora wzrasta liniowo. Obecnie w wielu silnikach samochodowych wentylator chłodzący jest napędzany elektrycznie, ale w większości przypadków jest sterowany na zasadzie przekaźnika. Taka kontrola ma tylko jedną zaletę – łatwość wykonania. Wystarczy mieć czujnik temperatury z wyjściem stykowym, który steruje silnikiem wentylatora bezpośrednio lub poprzez przekaźnik pośredni. Główną wadą tej metody jest gwałtowny spadek temperatury płynu chłodzącego na wylocie chłodnicy po włączeniu wentylatora. Wentylator pracujący z pełną mocą obniża temperaturę płynu chłodzącego na wylocie chłodnicy o 15 ... 25 оZ lub więcej. Dostając się do płaszcza chłodzącego silnika znacznie schłodzona ciecz wywołuje szok termiczny na gorących powierzchniach, co negatywnie wpływa na pracę silnika. Dla jego komfortowej pracy pożądane jest utrzymywanie temperatury płynu chłodzącego zbliżonej do optymalnej zalecanej przez producenta, a nagłe skoki temperatury (szoki termiczne) należy w zasadzie wykluczyć. W niektórych pojazdach z mechanicznie napędzanym wentylatorem chłodzącym osiąga się to poprzez połączenie wentylatora z wałem korbowym silnika za pomocą sprzęgła wiskotycznego. Zmienia moment obrotowy przenoszony na wał wentylatora w zależności od temperatury płynu chłodzącego. To stabilizuje temperaturę. Proponowane urządzenie jest elektronicznym analogiem sprzęgła wiskotycznego do wentylatora z napędem elektrycznym. Automatycznie dostosowuje prędkość swoich obrotów w zależności od temperatury płynu chłodzącego. Urządzenie działa z sieci pokładowej samochodu pod napięciem 10...18 V w niej i może sterować wentylatorem o maksymalnym poborze prądu do 20 A lub do 30 A, pod warunkiem, że powierzchnia radiatora elementy mocy są zwiększone. Własny pobór prądu przez urządzenie nie przekracza kilku miliamperów. Wartości temperatury załączenia wentylatora przy minimalnej prędkości obrotowej oraz temperatury, przy której prędkość obrotowa wentylatora osiąga maksimum ustawiane są z rozdzielczością 0,1 оC podczas programowania mikrokontrolera. W przypadku awarii czujnika temperatury płynu chłodzącego urządzenie przechodzi w tryb awaryjny, umożliwiając bezpieczny dojazd silnika do warsztatu. Schemat urządzenia pokazano na ryc. 1. Czujnik cyfrowy DS18B20 (BK1) mierzy temperaturę. Zastosowanie tego czujnika eliminuje konieczność kalibracji produkowanego urządzenia oraz poprawia jego powtarzalność.
Informacje o temperaturze są odczytywane z czujnika przez mikrokontroler ATtiny2313A-PU (DD1), który jest taktowany impulsami 1 MHz z wewnętrznego generatora RC. Proporcjonalnie do temperatury reguluje napięcie zasilania silnika wentylatora, a co za tym idzie prędkość jego wirnika. Silnik otrzymuje napięcie pulsacyjne, którego składowa stała, określająca prędkość obrotową, zależy od współczynnika wypełnienia (stosunku czasu trwania impulsów do okresu ich powtarzania). Program ustawia współczynnik wypełnienia ośmiobitowymi liczbami binarnymi załadowanymi do rejestru porównawczego timera mikrokontrolera pracującego w trybie PWM. Impulsy generowane przez mikrokontroler sterują pracą wyłącznika zasilania na tranzystorze polowym VT1, który zamyka i otwiera obwód zasilania silnika wentylatora z sieci pokładowej pojazdu. W tym przypadku stała składowa napięcia przyłożonego do silnika jest równa U = U0 (N/255) gdzie U0 - napięcie w sieci pokładowej, V; N to numer załadowany do rejestru mikrokontrolera. Można go zmieniać w krokach ΔU = U0 / 255. Przy napięciu w sieci pokładowej 12 V ΔU≈0,05 V, co pozwala na prawie płynną regulację prędkości wentylatora. Aby zapewnić niezawodne działanie kluczowego tranzystora VT1 w trybach przejściowych, mikrokontroler steruje nim za pomocą sterownika TC4420EPA (DA1). Nowoczesne tranzystory polowe, mające bardzo niską rezystancję w kanale otwartym (kilka miliomów), są w stanie przełączać znaczny prąd nawet bez użycia radiatora. Jednak duża pojemność wejściowa tranzystora polowego, która w przypadku urządzeń o dużej mocy osiąga kilka tysięcy pikofaradów, jest ładowana i rozładowywana podczas przełączania. Trwa to tym dłużej, im większa jest impedancja wyjściowa źródła sygnału sterującego. Złe jest to, że w procesie ładowania pojemności tranzystor polowy jest w trybie aktywnym, a rezystancja jego kanału jest dość wysoka. Dlatego w czasie przełączania w krysztale tranzystora uwalniana jest znaczna ilość mocy, co może doprowadzić do jego przegrzania i nieodwracalnego uszkodzenia. Jedynym sposobem walki z tym zjawiskiem jest przyspieszenie procesu ładowania. Aby to zrobić, tranzystory polowe są sterowane przez wyspecjalizowane wzmacniacze (sterowniki), które mają niską impedancję wyjściową i zapewniają duży (do kilku amperów) impulsowy prąd ładowania-rozładowania. Zapewnia to szybkie ładowanie pojemności wejściowej tranzystora FET, a tym samym minimalizuje czas jego pracy w trybie aktywnym i zmniejsza rozpraszaną na nim moc. Rezystor R4 utrzymuje logikę wejściową sterownika w stanie niskim podczas uruchamiania mikrokontrolera, o ile wszystkie jego wyjścia pozostają w stanie wysokiej impedancji. Eliminuje to niepotrzebne otwieranie tranzystora VT1 w tym czasie. Dioda VD1 eliminuje samoindukujące się impulsy EMF, które występują w uzwojeniach silnika wentylatora w momentach zamknięcia tranzystora VT1. Podczas pracy program mikrokontrolera stale monitoruje obecność i działanie czujnika temperatury. W przypadku braku połączenia z nim przechodzi w tryb pracy awaryjnej. W tym trybie, niezależnie od temperatury płynu chłodzącego, wentylator zostanie włączony z pełną mocą na 33 sekundy, a następnie wyłączony na ten sam czas. Oczywiście nie jest to najlepszy sposób na schłodzenie silnika, ale zapobiega jego całkowitej awarii w przypadku braku chłodzenia. Przejście do trybu awaryjnego sygnalizowane jest zapaleniem się diody HL1. Jeżeli awaria komunikacji z czujnikiem była chwilowa, po jej przywróceniu urządzenie przechodzi do normalnej pracy. Program mikrokontrolera do sterowania wentylatorami zawiera następujące dane początkowe jako stałe: - Tmin = 87 - temperatura płynu chłodzącego, оC, przy której wentylator powinien zacząć pracować na minimalnych obrotach; Jak wiadomo czujniki przemysłowe przeznaczone do sterowania pracą wentylatorów chłodzących mają dwa główne parametry – temperaturę włączenia i temperaturę wyłączenia. Należy je wybrać jako Tmax oraz Tmin. Wartość N1 należy ustawić tak, aby składowa stała napięcia na silniku wentylatora była równa jego napięciu rozruchowemu Utr. Problem polega na tym, że w danych technicznych wentylatorów nie jest zwyczajem podawanie napięcia zerwania, dlatego autor nie mógł znaleźć wartości tego parametru w literaturze ani w dokumentacji. Trzeba było to ustalić doświadczalnie. Technika jest prosta - przykładając napięcie do silnika, znajdź jego wartość, przy której wał zacznie się powoli obracać (obrócić w ciągu jednej lub dwóch sekund), ale stabilnie. Dla większości silników prądu stałego o znamionowym napięciu zasilania 12 V napięcie zadziałania mieści się w zakresie 3...5 V. Podczas uruchamiania programu mikrokontroler na podstawie wartości Tmax, Tmin a N1 oblicza Dn - wymagana stromość zależności wartości załadowanego rejestru porównawczego timera kodowego od temperatury: Dn = (255 - N1)/(Tmax - Tmin). Następnie rozpoczyna się główna pętla programu. Przede wszystkim następuje sprawdzenie komunikacji z czujnikiem temperatury, aw przypadku jego braku przejście do pracy awaryjnej. Program przeprowadza takie sprawdzenie co sekundę. Jeśli kolejna kontrola wykaże, że czujnik działa, normalna praca zostaje przywrócona. Gdy czujnik jest sprawny, mierzy aktualną temperaturę płynu chłodzącego T. Jeśli jest poniżej Tmin, program wyłącza wentylator, w innym przypadku oblicza wymaganą wartość kodu sterującego za pomocą wzoru N = (T - Tmin) Dn+N1. Proporcjonalnie do niej zostanie ustawiony współczynnik wypełnienia napięcia zasilającego silnik, a co za tym idzie częstotliwość obrotów jego wirnika. W rezultacie temperatura płynu chłodzącego przy stałym obciążeniu silnika jest utrzymywana na stałym poziomie. Przy zmiennym obciążeniu temperatura waha się w małych granicach w przedziale Tmin...Tmax. Wszystkie części urządzenia, z wyjątkiem czujnika BK1 i diody LED HL1, umieszczone są na płytce drukowanej o wymiarach 58x65 mm, której rysunek przedstawiono na rys. 2, a układ elementów – na ryc. 3.
Mikroukłady są lutowane bezpośrednio do płytki bez paneli, których użycie jest niepożądane w warunkach dużych wibracji. Na płytce znajdują się niewidoczne na schemacie pola stykowe SCK, RST, VCC, MISO, MOSI, GND, do których podczas programowania mikrokontrolera wlutowane są przewody o tej samej nazwie z programatora. W takim przypadku płytka i programator podczas programowania powinny być zasilane napięciem +5 V (VCC) z tego samego źródła. Płytka jest przystosowana do montażu na powierzchni rezystorów i kondensatorów o rozmiarze 1206. Dioda SR2040 (URL: files.rct.ru/pdf/diode/5261755198365.pdf) - w dwupinowej obudowie TO220AC. Wraz z tranzystorem IRF3808 mocuje się go za pomocą pasty termoprzewodzącej na wspólnym radiatorze o powierzchni chłodzącej około 60 cm2. Zasada mocowania tranzystora 5 lub diody do radiatora 1 i całego zespołu do płytki drukowanej 2 jest pokazana na ryc. 4. Dioda jest odizolowana od radiatora uszczelką mikową, a od śruby mocującej 4 i metalowej tulejki 3 - tuleją izolującą (elementów izolujących nie pokazano na rysunku). Pomiędzy obudowami diody i tranzystora znajduje się trzeci punkt mocowania radiatora do płytki. Tutaj jest również mocowany za pomocą śruby i tulei.
Wszystkie przewody drukowane płytki, przez które przepływa prąd silnika wentylatora, muszą być pokryte warstwą lutu o grubości co najmniej 0,7...1 mm, a przekrój przewodów zasilających musi zapewniać przejście tego prądu. Wskazane jest umieszczenie diody HL1 we wnętrzu samochodu, aby kierowca miał aktualną informację o aktualnym trybie pracy urządzenia. Czujnik DS18B20 (VK1) należy umieścić w obudowie ze standardowego stykowego czujnika temperatury płynu chłodzącego, z którego należy najpierw usunąć całe „nadzienie”. Taki korpus może być również wykonany z mosiądzu przy zachowaniu wymiarów gabarytowych i przyłączeniowych. Umiejscowienie czujnika DS18B20 w obudowie pokazano na rys. 5. Czujnik 4 z przylutowanym do jego zacisków złączem 1 umieszcza się we wnęce obudowy 3 tak, aby jego górna część, na którą nałożona jest warstwa pasty termoprzewodzącej 5, dotykała dna wnęki.
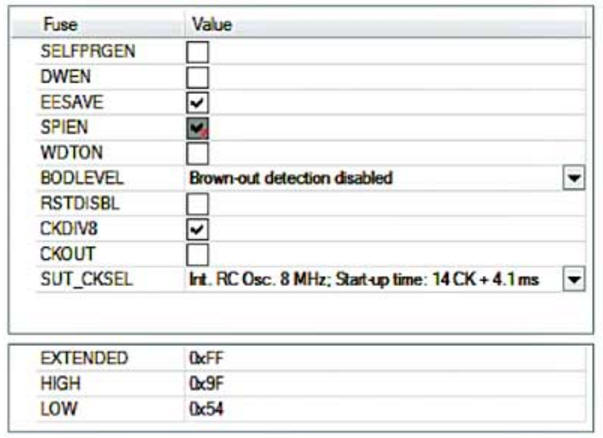
Następnie wnęka jest wypełniona szczeliwem żaroodpornym. Złącze 1 musi mieć antykorozyjną powłokę styków, być bryzgoszczelne, solidnie zamocować współpracującą część, zapobiegając jej odłączeniu na skutek wibracji. Przygotowany czujnik jest instalowany w miejsce zwykłego. Zmontowaną tablicę umieszcza się w skrzyni o odpowiednich wymiarach, która znajduje się w komorze silnika samochodu. W obudowie znajdują się otwory wentylacyjne. Mikrokontroler ATtiny2313A można zastąpić inną rodziną AVR, która ma co najmniej jeden 8-bitowy i jeden 16-bitowy timer oraz co najmniej 2 KB pamięci programu. Oczywiście wymiana mikrokontrolera będzie wymagać ponownej kompilacji programu i ewentualnie zmiany układu płytki drukowanej. Zamiast nieodwracającego sterownika niskotonowego TC4420EPA można użyć innego podobnego, takiego jak MAX4420EPA. Diodę barierową Schottky'ego SR2040 można wymienić na podobną o dopuszczalnym napięciu wstecznym co najmniej 25 V i dopuszczalnym prądzie przewodzenia co najmniej równym prądowi roboczemu wentylatora. Jednak diody Schottky'ego o napięciu wstecznym większym niż 40 V nie są zalecane, ponieważ większy spadek napięcia przewodzenia na takiej diodzie doprowadzi do wzrostu rozpraszania ciepła. Zamiennik tranzystora polowego IRF3808 z izolowaną bramką i kanałem typu n należy dobrać o akceptowalnym stałym prądzie drenu w temperaturze 100°C 2,5...3 razy większym od prądu pracy wentylatora i o rezystancji otwartego kanału przy prądzie roboczym wentylatora do 20 A - nie więcej niż 10 mΩ i 20 ... 30 A - nie więcej niż 7 mΩ. Dopuszczalne napięcie dren-źródło musi wynosić co najmniej 25 V, a napięcie bramka-źródło musi wynosić co najmniej 20 V. Prawidłowo zmontowane urządzenie ze sprawnych części będzie wymagało regulacji tylko wtedy, gdy dane początkowe w załączonej wersji programu, o której była mowa wcześniej, nie odpowiadają wymaganym. W takim przypadku należy je poprawić w kodzie źródłowym programu, ponownie skompilować w środowisku programistycznym Bascom AVR i załadować do pamięci mikrokontrolera zamiast dołączonego do artykułu pliku Cooler-test.hex, wynikowego pliku HEX. Jeżeli napięcie rozruchowe silnika wentylatora nie jest znane, można je określić doświadczalnie. Aby to zrobić, zamiast działającego programu, musisz załadować opracowany przeze mnie program debugujący do pamięci mikrokontrolera. Załączony do artykułu plik Cooler-test.hex zawiera jego kody. Konfigurację mikrokontrolera programuje się analogicznie dla programów roboczych i testowych zgodnie z rys. 6, który przedstawia okno konfiguracji programatora AVRISP mkII.
Po 3 s od włączenia zasilania program Cooler-test zaczyna sterować wentylatorem, stopniowo zwiększając od 55 do 95 kroków po 5 jednostek kod określający cykl pracy napięcia impulsowego zasilającego wentylator. Odpowiada to z grubsza zmianie składowej stałej tego napięcia z trzech do pięciu woltów. Czas trwania każdego etapu wynosi 10 s, podczas których wentylator i dioda HL1 są włączone, oraz przerwa 5 s, podczas której wentylator jest wyłączony, a dioda jest wyłączona. Zakończenie programu sygnalizowane jest serią pięciu krótkich błysków diody. Obserwując diodę łatwo jest określić w jakim momencie wentylator zaczął się obracać oraz określić wartość N1, którą należy wpisać do programu głównego. Działanie urządzenia w trybie awaryjnym sprawdza się poprzez odłączenie złącza od czujnika temperatury. W takim przypadku wentylator powinien się włączyć i pracować z pełną mocą w trybie przerywanym (33 s - praca, 33 s - przerwa). Dioda LED HL1 powinna się świecić. Jego pożądaną jasność ustawia się wybierając rezystor R3. Programy mikrokontrolera można pobrać ze strony ftp://ftp.radio.ru/pub/2016/11/fan.zip. Autor: A. Sawczenko, poz. Zelenogradsky, obwód moskiewski
Maszyna do przerzedzania kwiatów w ogrodach
02.05.2024 Zaawansowany mikroskop na podczerwień
02.05.2024 Pułapka powietrzna na owady
01.05.2024
▪ Karta graficzna GIGABYTE GeForce GTX 1650 D6 Eagle OC ▪ Tłumaczenie języka migowego w czasie rzeczywistym ▪ Zielona energia spowoduje kryzys metali rzadkich
▪ część serwisu Transport osobisty: lądowy, wodny, powietrzny. Wybór artykułu ▪ Artykuł Prawo Archimedesa. Historia i istota odkryć naukowych ▪ artykuł Ogólne zasady udzielania pierwszej pomocy. Opieka zdrowotna ▪ artykuł Blok ATX do AT. Encyklopedia elektroniki radiowej i elektrotechniki ▪ artykuł Gniazdo samochodowe 220 V 400 W. Encyklopedia elektroniki radiowej i elektrotechniki
Komentarze do artykułu: viktor Przy zwarciu nie wyłączy się - okablowanie wypali się. działa pod lekkim obciążeniem. Леонид Nie rozumiesz, o co chodzi? tyrystor może faktycznie włączać i wyłączać masę. Ale kiedy zainstalujesz diodę, to jest masa, pozostaje włączona. a żeby to zadziałało trzeba dodać przekaźnik, który połączy diodę z układem i poda napięcie na elektrodę sterującą. Może czegoś nie rozumiem, kto jest bardziej piśmienny - wyjaśnij gość Leonidzie! Dioda przepuszcza prąd w jednym kierunku, tj. od generatora do akumulatora.
Strona główna | biblioteka | Artykuły | Mapa stony | Recenzje witryn
www.diagram.com.ua |






 Zostaw swój komentarz do tego artykułu:
Zostaw swój komentarz do tego artykułu: