|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese
ENCYKLOPEDIA RADIOELEKTRONIKI I INŻYNIERII ELEKTRYCZNEJ Dotykowe sterowanie oświetleniem za pomocą pilota. Encyklopedia elektroniki radiowej i elektrotechniki
Encyklopedia radioelektroniki i elektrotechniki / Mikrokontrolery Proponowane urządzenie jest jedną z opcji ściemniaczy mikrokontrolerów do lamp żarowych, których projekty można znaleźć w Internecie oraz w literaturze krótkofalarstwa. W takich regulatorach stosuje się zwykle jeden z trzech sposobów sterowania: z własnego pilota; z dowolnego pilota z zapamiętaniem kodu klucza; z dowolnego pilota po naciśnięciu dowolnego klawisza w określony sposób. W tym przypadku wybierana jest pierwsza opcja, którą uważam za najbardziej udaną, pomimo tego, że wymagany jest osobny panel sterowania. Pozwól, że wyjaśnię trochę dlaczego. Ponieważ różne systemy sterowania IR mają różne częstotliwości nośne modulacji, mogą one również różnić się arbitralnie zastosowaną parą „pilot-sterownik”, w wyniku czego zakres sterowania może zostać znacznie zmniejszony, co powoduje pewne niedogodności. Wadą tego drugiego sposobu jest również to, że regulator może reagować na polecenia, które w ogóle nie są do niego przeznaczone lub regulacja jest utrudniona ze względu na skomplikowane manipulacje kluczykiem z pilotem. Proponowany regulator sterowany jest za pomocą dwóch przycisków dowolnego pilota współpracującego z szeroko stosowanym systemem komend RC-5. Piloty tego systemu są dość przystępne i tanie. Funkcje realizowane przez regulator:
Kontrola regulatora Sterowanie ręczne (dotykowe). odbywa się poprzez dotknięcie bez wysiłku całą dłonią lub czterema złożonymi ze sobą palcami czujnika.
Zdalne sterowanie odbywa się za pomocą pilota skierowanego w stronę wyłącznika. Do sterowania regulatorem zdefiniowane są dwa przyciski pilota.
Kody przycisków pilota odpowiadające tym poleceniom są przechowywane w pamięci EEPROM mikrokontrolera. Dzięki temu w trybie nauki (opisanym w instrukcji) w każdej chwili można zmienić zestaw przycisków pilota, którymi steruje się kontroler. Urządzenie regulacyjne Regulator zbudowany jest na niedrogim i niedrogim mikrokontrolerze АТtiny2313-20SU. Schemat ideowy urządzenia przedstawiono poniżej.
Węzeł zasilający składający się z elementów C2, R2, VD1, VD2, C3, C4 służy do zasilania mikrokontrolera i odbiornika podczerwieni napięciem zbliżonym do 5 V. Elementy R3C5 stanowią filtr obwodu zasilania fotodetektora. Węzeł synchronizacji. Dzielnik napięcia wejściowego jest wykonany na R4R6, który jest niezbędny do wykrycia zera i wyeliminowania fałszywych alarmów w momentach otwarcia VS1. C6 służy do tłumienia szumu impulsowego. Wyjście dzielnika jest połączone z wyjściem PD2. Wewnętrzne diody tego wyjścia MK ograniczają napięcie wejściowe. Węzły sterowania i sygnalizacji. Na elementach R7, VT1, R8, C7 zaimplementowano dotykową jednostkę sterującą. Kiedy nie ma ręki na czujniku, VT1 jest zamknięty, a napięcie jednostki logicznej jest podawane na wejście PD4 mikrokontrolera. Po dotknięciu pokrywy regulatora na to wejście podawane jest napięcie zera logicznego, a program MK przetwarza polecenia sterujące.
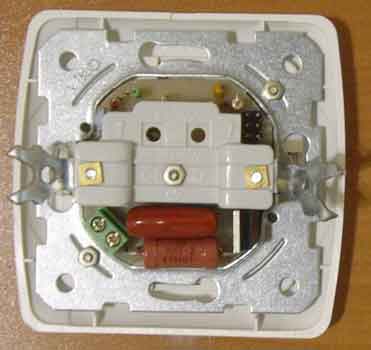
Przełącz węzeł masa. Z wyjścia PB0 mikrokontrolera DD1 ujemne impulsy przez R5 otwierają triak VS1 w różnych momentach półfali napięcia sieciowego i tym samym regulują jasność lampy. Obwód R1C1 oraz dławik L1 służą do tłumienia zakłóceń pochodzących od regulatora do sieci w momencie przełączania obciążenia. Konstrukcja regulatora Regulator montowany jest na jednostronnej płytce drukowanej wykonanej z folii z włókna szklanego, której rysunek i rozmieszczenie części znajdują się w załączonych plikach. Płytka przeznaczona jest do montażu w naściennym wyłączniku oświetleniowym pojedynczym marki VI-KO (modele „Yasemin” lub „Carmen”), z którego usuwa się niepotrzebne elementy i mocuje do ramki wkrętem d2.5mm. w centrum. Pod jego kapeluszem musisz umieścić podkładkę izolacyjną. Z tyłu mocowany nakrętką jak na załączonym zdjęciu.Czujnik w postaci wyciętego z folii prostokąta 30x45mm montujemy po wewnętrznej stronie osłony (która wcześniej pełniła funkcję klucza) i mocujemy na nim przezroczystą taśmą na całej powierzchni, konieczne jest jedynie pozostawienie podkładki kontaktowej na sprężynę. Po bokach pokrywy przyklejone są paski tektury o wymiarach 4 mm x 30 mm i grubości 0,5 mm, dzięki czemu można ją z pewnym wysiłkiem założyć. Emiter piezoelektryczny jest mocowany do pokrywy za pomocą dwustronnej taśmy samoprzylepnej. Rysunki w załączonych plikach przedstawiają elementy kadłuba po wykonaniu. Regulator umieszcza się w standardowej wnęce na wyłącznik w ścianie i podłącza zgodnie ze zwykłym obwodem dwuprzewodowym, nie są wymagane żadne przeróbki. Konieczne jest prawidłowe podłączenie przewodu fazowego, jak pokazano na schemacie, w przeciwnym razie sterowanie z czujnika nie będzie działać. Wygląd zmontowanego urządzenia.
Części używane i możliwe zamienniki. Do sterowania regulatorem można użyć dowolnego pilota działającego zgodnie z protokołem RC-5. Wymieniamy mikrokontroler DD1 na ATtiny2313-20SI lub ATtiny2313V-20SU(SI), a fotodetektor B1 na podobny, przeznaczony na częstotliwość nośną 36 kHz, np. SFH506-36, TSOP1736, TSOP1836SS3V, ale powinien należy zauważyć, że położenie pinów fotodetektorów różnych typów może się różnić. Jako L1 zastosowano przemysłowy dławik powierzchniowy marki CDRH127/LDNP-101MC PBF (100 μH 1,7A). Można go zastąpić podobną lub domową indukcyjnością 30 - 200 μH dla prądu nie mniejszego niż lampa zużywana przez lampy (0,5 A na każde 100 W). Symetryczny tyrystor VS1 może być z serii BT137 - BT139 na napięcie co najmniej 400V lub podobny innego producenta o niskim prądzie sterującym. Wymienimy diodę Zenera VD2 na 1N4734A, KS156A, KS456A. Zamiast diody HL1 wskazanej na schemacie możesz użyć HB3B-446ARA lub podobnych super jasnych czerwonych kolorów poświaty (jeśli jasność nie jest wystarczająca, możesz zmniejszyć R14 do 4,7 com.). Emiter piezoelektryczny można zastąpić bezramkowym typu FML-34,7T-2,9V1-100 lub innym podobnym trójprzewodowym tzw. „samosterującym”, na przykład dzwonkiem ze starych aparatów telefonicznych pochodzenia azjatyckiego. Oczywiście łatwiej jest zastosować emiter piezoelektryczny z wbudowanym generatorem, np. HPA17A lub HPM14A, ale autor nie mógł takiego kupić. W tym przypadku elementy R10, R11, R12, R13, VT2 nie są zainstalowane, a emiter dźwięku jest podłączony do + 5 V i do zacisku PD0, przestrzegając biegunowości. Zamiast VT1, VT2 można zastosować tranzystory typu KT315 (B, G, E), 2SC1015Y, KT3102 lub podobne. W tym samym czasie VT1 120 300. Kondensatory C2, C200 typu K1-2 lub podobne importowane na napięcie nie niższe niż wskazane na schemacie. Wszystkie rezystory - moc MLT pokazana na schemacie. Stosunek rezystancji R73 / R17 musi być bliski 6 - w przeciwnym razie detektor zera nie będzie działał poprawnie. Montaż i regulacja regulatora Bezbłędnie zmontowany reduktor z części serwisowalnych nie wymaga regulacji. Konieczne jest jedynie zaprogramowanie mikrokontrolera. Programator podłącza się do złącza XP2 (standardowe złącze sześciopinowe do programowania mikrokontrolerów AVR w układzie). W takim przypadku należy zasilić sterownik napięciem z programatora (na czas programowania sterownik musi być odłączony od sieci). W załączonych plikach znajdują się dwa firmware: jeden realizuje tylko sterowanie dotykowe, a drugi oba rodzaje sterowania przez 5 minut (przeznaczony do testowania wydajności urządzenia). Aby uzyskać pełne oprogramowanie układowe, skontaktuj się z autorem, alexperm72@mail.ru. Bity FUSE mikrokontrolera DD1 muszą być zaprogramowane w następujący sposób: • CKSEL3...0 = 0100 - synchronizacja z wewnętrznego oscylatora RC 8 MHz;
Instrukcja obsługi znajduje się w załączonych plikach. Sterownik posiada tryb sprawdzania kompatybilności pilota. Aby to zrobić, musisz go włączyć i ustawić minimalną jasność, a następnie nacisnąć dowolny przycisk na pilocie i jeśli działa zgodnie z systemem RC-5, rozlegnie się sygnał dźwiękowy przez 1 sekundę. Dopuszczalna moc łączna lamp włączanych - 400 W. W przypadku większego konieczne jest zainstalowanie triaka na radiatorze odpowiedniego obszaru. Regulator przeznaczony jest do sterowania wyłącznie obciążeniem czynnym. Nie podłączaj do niego innych urządzeń, takich jak świetlówki lub silniki elektryczne. Może to spowodować uszkodzenie regulatora. Regulator ma dobrą powtarzalność, wszystkie zmontowane egzemplarze od razu zaczęły działać bez żadnej regulacji. Podczas montażu i regulacji regulatora należy pamiętać, że wszystkie jego elementy znajdują się pod napięciem sieciowym i ich dotknięcie grozi porażeniem prądem elektrycznym. Pobierz pliki projektu w jednym archiwum Autor: Alexey Batalov, alexperm72@mail.ru, ICQ#: 477022759; Publikacja: mcuprojects.narod.ru/dimmerSIR/DimmerSIR.html
Maszyna do przerzedzania kwiatów w ogrodach
02.05.2024 Zaawansowany mikroskop na podczerwień
02.05.2024 Pułapka powietrzna na owady
01.05.2024
▪ Cyfrowe karty rozszerzeń audio STM32 Nucleo ▪ Bezprzewodowa kamera D-Link DCS-8325LH w chmurze ▪ Cukrzyca typu 2 zwiększa ryzyko wczesnej demencji
▪ sekcja serwisu Ciekawostki. Wybór artykułów ▪ artykuł W moje lata nie należy się odważać ... Popularne wyrażenie ▪ artykuł Kto i kiedy został oficjalnie odznaczony Orderem za pijaństwo? Szczegółowa odpowiedź ▪ artykuł o tsunami. Cud natury ▪ artykuł Programowanie układów pamięci FLASH. Encyklopedia elektroniki radiowej i elektrotechniki ▪ artykuł Zasięg 160 metrów w Radiu 76. Encyklopedia elektroniki radiowej i elektrotechniki
Komentarze do artykułu: lew Myślę, że to ciekawy schemat.
Strona główna | biblioteka | Artykuły | Mapa stony | Recenzje witryn
www.diagram.com.ua |



 Zostaw swój komentarz do tego artykułu:
Zostaw swój komentarz do tego artykułu: