|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese
ENCYKLOPEDIA RADIOELEKTRONIKI I INŻYNIERII ELEKTRYCZNEJ Urządzenie do zdalnego monitorowania stanu czujników piezoelektrycznych
Encyklopedia radioelektroniki i elektrotechniki / Urządzenia zabezpieczające i sygnalizacja obiektów Niebezpieczeństwo następstw wypadku powoduje konieczność postawienia zwiększonych wymagań co do niezawodności toru pomiarowego, a przede wszystkim czujnika, gdyż pracuje on w najtrudniejszych warunkach, jakie panują na tym obiekcie. Istnieje potrzeba częstszego kontrolowania jego właściwości jako środka pomiarowego niż przy okresowej (zwykle raz w roku) weryfikacji. Ponieważ czujnik jest często instalowany w trudno dostępnym miejscu (na przykład pod obudową urządzenia), sterowanie musi odbywać się zdalnie. Metoda sterowania [1], zaimplementowana w opisywanym urządzeniu i umożliwiająca, polega na tym, że przetwornik piezoelektryczny czujnika jest odwracalny, generuje sygnał elektryczny przy oddziaływaniu mechanicznym i ulega mechanicznemu odkształceniu przy oddziaływaniu elektrycznym. podawane jest napięcie. W obu przypadkach poziom reakcji na uderzenie jest określony przez ten sam współczynnik, zwany modułem piezoelektrycznym. Bezwładność czujnika jako układu mechanicznego jest określona przez częstotliwość jego swobodnych oscylacji, która zależy przede wszystkim od właściwości samego czujnika, ale także od właściwości mechanicznych części obiektu stykającej się z czujnikiem. Nazywa się to częstotliwością rezonansu instalacji (UR). Bezwładność elektryczna nie jest związana z mechaniczną i jest określana w pierwszym przybliżeniu przez iloczyn pojemności czujnika z przewodem i rezystancji czynnej jego obciążenia. Widmo częstotliwości drgań mierzonych przez czujnik zawsze leży poniżej częstotliwości SD (w przeciwnym razie wynik pomiaru będzie niewiarygodny), zajmując z reguły obszar od zera do 0,2...0,3 jego wartości. Aby połączyć się z opisanym urządzeniem sterującym, czujnik jest odłączony od sprzętu, z którym pracuje. Przyłożone jest do niego stałe napięcie, ładujące jego pojemność i odkształcające element piezoelektryczny. Czas trwania tej operacji powinien być taki, aby wszystkie przejściowe procesy mechaniczne i elektryczne miały czas na zakończenie. Następnie źródło napięcia zostaje odłączone od czujnika, a do jego zacisków zostaje podłączona niewielka rezystancja czynna na czas (zwykle kilkadziesiąt mikrosekund), wystarczający do prawie całkowitego rozładowania pojemności czujnika. Odkształcenie mechaniczne elementu piezoelektrycznego nie może zmieniać się w tym samym tempie, jego powrót do stanu początkowego następuje w postaci drgań tłumionych o częstotliwości SD. Element piezoelektryczny przekształca te oscylacje w sygnał elektryczny, który jest rejestrowany na przykład przez oscyloskop pamięciowy. Oznaką normalnego stanu czujnika jest niezmienność kształtu i poziomu sygnału podczas wielokrotnego monitorowania. Głównymi węzłami urządzenia sterującego są dwa pojedyncze wibratory, które ustawiają czas trwania interwałów zamykania i rejestracji oraz dwa wyłączniki. Wzbudzenie oscylacji przez zanik impulsu o stabilnym czasie trwania zamknięcia pozwala na uzyskanie dobrej powtarzalności poziomu i kształtu sygnału elektrycznego, co jest niezbędne do operacji metrologicznych. Opisana wersja urządzenia jest nieco bardziej skomplikowana. Ponieważ oscyloskop pamięciowy jest drogim i stosunkowo rzadkim urządzeniem, proces sterowania odbywa się w sposób cykliczny, co umożliwiło zastosowanie konwencjonalnego oscyloskopu. Aby zapewnić większą niezawodność w określaniu częstotliwości SD, wprowadzono filtr, który tłumi zakłócenia o wysokiej częstotliwości. Posiada autonomiczny zasilacz niskonapięciowy oraz miernik częstotliwości UR ze wskaźnikiem LED.
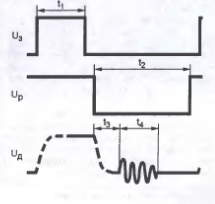
Schemat urządzenia pokazano na ryc. 1. Multiwibrator na elementach DD1.1 i DD1.2 generuje impulsy prostokątne. Z wyjścia elementu DD1.2 impuls o czasie trwania t jest podawany na wejście sterujące przełącznika DA1.3. Podczas jego pracy napięcie ładowania +1 V jest podawane przez zwarty przełącznik na wejście czujnika podłączonego do złącza X14 poprzez obwód R15R3HL12 (krzywa U3 na rys. 2).
Do tego napięcia ładowana jest pojemność czujnika. Dioda LED HL3 ma za zadanie sygnalizować zwarcie w obwodzie czujnika. Impuls, odwrotny do rozważanego, pochodzi z wyjścia elementu DD1.1 przez obwody różnicujące (C2R6) i całkujące (C4R11) do wejść elementu DD1.3. Na jego wyjściu powstaje impuls o niskim poziomie logicznym, znajdujący się w przerwie między impulsami ładowania, ale o czasie trwania t2 krótszym niż przerwa. Poprzez obwód różniczkujący C6R18 opadające zbocze tego impulsu uruchamia pojedynczy wibrator na zegarze DA6, którego impuls o czasie trwania określonym przez parametry obwodu R21C7 (przedział t3 na rys. 2) jest podawany na wejście sterujące dolnego (zgodnie z obwodem) przełącznika mikroukładu DA2. W tym przypadku wyjście czujnika (styk 3 złącza X1) jest podłączone do wspólnego przewodu przez przełącznik i rezystor R12, rozładowując pojemność czujnika. Napięcie na czujniku (krzywa U na rys. 2) spada do zera. Opadająca krawędź impulsu czasowego uruchamia pojedynczy wibrator na elementach DD6.1 i DD6.3, generując impuls o czasie trwania t4 (określony przez parametry obwodu C13R31R53) teraz o charakterze oscylacyjnym, przez obwód różniczkujący C6.2R2 jest zasilany do wejścia wzmacniacza na wzmacniaczu operacyjnym DA5, do którego wyjścia, przez rezystor R16, przełącznik SA4 jest podłączony albo do kondensatora C25 (tryb „Indication”), albo rezystora R3 (tryb „Diagnostic”) . W pierwszym przypadku powstaje filtr wygładzający, w drugim niezależny od częstotliwości dzielnik napięcia. Następnie sygnał trafia do złącza X8, do którego podłączony jest oscyloskop lub inny rejestrator. Impuls synchronizacji jest wyprowadzany na to samo złącze, zbiegając się w czasie z początkiem przedziału t27. Pozostałe węzły urządzenia tworzą miernik częstotliwości UR. Sygnał czujnika za pomocą wzmacniacza DA3 i komparatora napięcia DA5 jest przetwarzany na serię impulsów o standardowej amplitudzie. Wzmocnienie (10 lub 20) wybiera się przełącznikiem SA2, którego stan sygnalizują diody LED HL1 i HL2. Liczenie impulsów z wyjścia komparatora przez 1 ms dałoby wartość częstotliwości SD w kilohercach. Metoda ta okazała się jednak nie do przyjęcia, ponieważ naturalne oscylacje nowoczesnych czujników piezoelektrycznych zanikają znacznie szybciej. Dlatego konieczne było liczenie impulsów dla kilku krótszych interwałów o łącznym czasie trwania 1 ms. Eksperyment pokazał, że dwa interwały po 500 μs są w zupełności wystarczające. Konto przebiega w następujący sposób. Po naciśnięciu przycisku SB2 „Set. 0” licznik DD2.1 jest ustawiany w stan gotowości do zliczania, sygnalizowany diodą HL4 „Ready”, a liczniki DD4 i DD5 zostają zerowane. Długie naciśnięcie przycisku „Start” SB1 otwiera przełącznik DA1.1, a impulsy zegarowe z wyjścia elementu DD1.2 przechodzą przez otwarty przełącznik DA1.2 do licznika DD2.1. Dwa wejścia sygnałów elementu DD3.2 pochodzą z wyjść 2 i 4 licznika, a trzecie wejście - z wyjścia elementu DD6.2. W efekcie wysoki poziom na wyjściu elementu DD3.3 występuje tylko podczas cykli pracy po szóstym i siódmym impulsie ładowania (licząc od momentu naciśnięcia przycisku SB1). Ósmy impuls ustawia wysoki poziom na wyjściu 8 licznika DD2.1, który zamyka przełącznik DA3.1 poprzez falownik DD1.2. Przepływ impulsów na wejście licznika DD2.1 ustaje, a dioda HL4 gaśnie. Teraz przycisk SB1 można zwolnić. Wyjście elementu DD3.3 jest podłączone do wejścia sterującego przełącznika DA1.4, połączonego między wyjściem komparatora DA5 a wejściem licznika DD4. Wskazanie stanu liczników DD4 i DD5 nie jest dosyć typowe - przy użyciu dwóch dziesięciodniowych linii diod HL5-HL24. Zrobiono to w celu zmniejszenia zużycia prądu: łączne zużycie wszystkich tych diod w żadnym przypadku nie przekracza 8 mA. Niestety, nawet bardziej ekonomiczne wyświetlacze LCD nie nadają się ze względu na niewystarczający zakres temperatur pracy. Diody VD1-VD3 wprowadzone w celu zmniejszenia przesłuchów. Wszystkie kondensatory w urządzeniu są ceramiczne, a C7 i C13 muszą mieć mały TKE, mogą być różne np. mika. Termostabilne (na przykład C2-31) powinny być również rezystory R21 i R31. Przełączniki - przesuwne małogabarytowe B1561. Jednak zamiast SA3 lepiej zastosować przycisk ze stykami przełączającymi, np. PS580N. Położenie styków po zwolnieniu przycisku musi odpowiadać temu pokazanemu na schemacie na ryc. jeden. Rodzaj złącza X1 zależy od tego, które czujniki mają być najczęściej sprawdzane. Autor zastosował wtyczkę blokową RS-4TV, ponieważ większość domowych przemysłowych czujników drgań to akcelerometry piezoelektryczne ABC i ANS z gniazdami kablowymi RS-4TV, których rozmieszczenie styków odpowiada temu pokazanemu na schemacie na ryc. 1. Ponieważ w tym przypadku rozłączne połączenie nie wymaga odporności na wibracje, zaleca się ostrożne usunięcie gwintu zewnętrznego na korpusie wtyczki, co ułatwi i przyspieszy proces podłączania i odłączania czujników. Czujniki innych typów można podłączyć do urządzenia za pomocą odpowiednich adapterów. Złącze X2 może być dowolne, na przykład ONTS-VG-2-3/16-p. Przewód sygnałowy w podłączonym do niego kablu musi być ekranowany, przewód sygnałowy zegara nie wymaga ekranowania.
Urządzenie zasilane jest baterią składającą się z pięciu do sześciu ogniw galwanicznych o rozmiarze AA, których napięcie zamieniane jest na bipolarny stabilizowany +/-12 V za pomocą konwertera TMR0522 [2], połączonego zgodnie z układem przedstawionym na rys.3. 1. Gdy napięcie akumulatora GB7,5 wynosi 130 V, pobierany z niego prąd wynosi odpowiednio 145 i XNUMX mA w trybach „Diagnostyka” i „Wskazywanie”. Urządzenie zmontowane jest na dwóch płytkach, jedna nad drugą i połączone jest przewodami taśmowymi. Na górnej płytce zamontowane są kontrolki i diody, a na dolnej pozostałe elementy, poza złączami, które znajdują się na osobnym panelu narożnym. Ciało jest wybrane gotowe. Ponieważ większość aktywnych elementów to bramki logiczne i wzmacniacze operacyjne bez zewnętrznej korekcji, ustawienie prawidłowo okablowanego urządzenia nie wymaga dużego wysiłku. Po upewnieniu się, że multiwibrator na elementach DD1.1, DD1.2 generuje symetryczne prostokątne impulsy z częstotliwością powtarzania 30 ± 5 Hz, należy sprawdzić położenie i kształt impulsów na wyjściu elementu DD1.3 .
W przypadku braku oscyloskopu dwuwiązkowego można do tego użyć najprostszego sumatora, którego obwód pokazano na ryc. cztery.
Oscylogram sygnału na jego wyjściu powinien mieć postać pokazaną na ryc. 5, gdzie t1 i t2 są tymi samymi przedziałami, co na rys. 2. Dobierając rezystory R6 i R11, upewnij się, że interwał t2 rozpoczyna się po 0,3 ... 1 ms po zakończeniu impulsu ładowania. Jego czas trwania powinien wynosić 5 ... 10 ms, dokładna wartość nie jest ważna. Impuls generowany przez timer DA6 musi mieć czas trwania w zakresie 20 ... 30 μs. Ale czas trwania impulsu na wyjściu elementu DD6.2 należy ustawić za pomocą rezystora trymującego R53 równego 500 μs z największą możliwą dokładnością. Wpływa to bezpośrednio na błąd pomiaru częstotliwości SD.
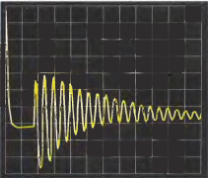
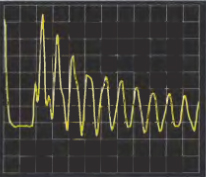
Do dalszej regulacji wymagany jest czujnik piezoelektryczny (akcelerometr), najlepiej o współczynniku konwersji rzędu miliwoltów na metr na sekundę na sekundę i częstotliwości swobodnej oscylacji (jest wyższa niż częstotliwość SD) powyżej 10 kHz. Podłączając czujnik do złącza X1, elementy sterujące oscyloskopu podłączonego do złącza X2 uzyskują stabilny obraz na ekranie, podobny do pokazanego na rys. 6-8. Pokazują oscylogramy ilustrujące zależność sygnału od stanu czujnika: luźny (rys. 6); zainstalowany zgodnie z instrukcją obsługi (ryc. 7); zainstalowany, ale z luźnym mocowaniem do kontrolowanej konstrukcji (rys. 8). Skala oscylogramów wzdłuż osi pionowej i poziomej wynosi odpowiednio 50 mV/dz. i 50 µs/działkę. Powtarzalność wzbudzonych oscylacji charakteryzują wyniki pomiaru położenia charakterystycznych punktów oscylogramów z dziesięciokrotnym powtórzeniem wzbudzenia. Rozrzut nie przekroczył 1,5% i praktycznie pokrywał się z błędem zastosowanego oscyloskopu pamięciowego S9-8. Pożądane jest upewnienie się, że na wyjściu wzmacniacza operacyjnego DA3 nie ma zniekształceń sygnału. W praktyce są one mało prawdopodobne, zakres tłumionych oscylacji czujników różnego typu jest nieco zmienny i nie przekracza kilkuset miliwoltów. Podczas sprawdzania działania wyzwalacza Schmitta na komparatorze DA5 należy porównać liczbę okresów sygnału na jego wejściu i impulsów na wyjściu. Progi wyzwalania są ustawiane przez dobór rezystorów R19 i R23. Pierwsza kontrola czujnika, specjalnie zaprojektowana do pracy na obiekcie długotrwale i nieprzerwanie eksploatowanym, jest pożądana do przeprowadzenia zaraz po jego zamontowaniu. W takim przypadku natychmiast stanie się jasne, czy wszystkie wymagania są spełnione (dopuszczalna niepłaskość i chropowatość powierzchni osadzenia, moment dokręcania gwintu, brak zanieczyszczeń itp.). Ich naruszenie może zmniejszyć częstotliwość SD tak bardzo, że sygnał czujnika nie będzie prawidłowo odzwierciedlał charakteru drgań. Dzięki temu możliwe jest wygenerowanie fałszywego polecenia zatrzymania awaryjnego obiektu. Otrzymany wynik (zliczanie częstotliwości SD i położenia przełącznika SA2) jest rejestrowany, będzie służył jako podstawa do oceny stanu czujnika w kolejnych cyklach kontrolnych. Zaobserwowane odchylenie będzie podstawą do dokładniejszego zbadania stanu czujnika i podjęcia decyzji o konieczności jego naprawy lub wymiany. Oznacza to, że sterowanie odbywa się na zatrzymanej jednostce. Jego temperatura niekoniecznie jest stała, a zastosowany efekt jest wrażliwy na jej zmianę. Jak wspomniano powyżej, na obu etapach procesu wzbudzania oscylacji reakcje na uderzenie determinowane są wartością modułu piezoelektrycznego – charakterystyką materiału przetwornika, który zależy od stopnia uporządkowania jego mikrostruktury, która maleje wraz ze wzrostem temperatury. W tym przypadku amplituda sygnału elektrycznego jest proporcjonalna do kwadratu modułu piezoelektrycznego, a jego zależność od temperatury jest odpowiednio silniejsza. Zgodnie z eksperymentem sygnał czujnika o maksymalnej temperaturze pracy 250°C podczas regulacji w temperaturach do 120°C miał niestabilność w granicach ±6%. Dlatego pożądane jest, aby we wszystkich cyklach kontrolnych rozpiętość temperatur nie przekraczała 20°C. W związku z tym lepiej jest obsługiwać urządzenie w połączeniu z urządzeniem, które pozwala mierzyć temperaturę czujnika. Możliwość przeprowadzenia kontroli na jednostce operacyjnej zależy od wielu okoliczności. Można od razu powiedzieć, że jeśli poziom drgań rejestrowany przez czujnik podczas normalnej pracy obiektu jest bliski granicy dla czujnika, to górna granica widma drgań zbliża się do częstotliwości SD, czyli w końcu do temperatury czujnik jest zbliżony do maksymalnego dopuszczalnego, kontrola jest niemożliwa. Będziesz musiał to przeprowadzić podczas planowanych postojów urządzenia, ale nawet w tym przypadku korzystanie z urządzenia pozwoli zaoszczędzić czas i pozbyć się pracy mechanicznej. Jeżeli powyższe okoliczności nie są tak oczywiste, kontrolę należy przeprowadzić przed uruchomieniem iw trakcie eksploatacji obiektu. Porównując wyniki, możesz podjąć świadomą decyzję. Należy pamiętać, że sterowanie za pomocą wyłącznie wbudowanych wskaźników opisywanego urządzenia realizuje tylko część możliwości. Analiza widma lub innych charakterystyk drgań własnych czujnika pozwoli nie tylko na dokładniejszą ocenę jego stanu, ale także na uzyskanie dodatkowych informacji o kondycji węzła obiektu, na którym czujnik jest zainstalowany. Faktem jest, że górna granica widma sygnału czujnika uzyskiwanego podczas jego normalnej pracy najczęściej nie przekracza 1000 Hz, a czasem nawet niżej. Małe uskoki na obiekcie mają niewielki wpływ na charakter widma drgań. A ponieważ podczas kontroli widmo jest nieporównywalnie szersze, to analizując je można zauważyć nawet niewielkie zmiany sytuacji na obiekcie, oczywiście, jeśli zachodzą w pobliżu czujnika. Analizator widma jest podłączony do złącza X2 zamiast oscyloskopu (lub razem z nim), a przełącznik SA3 jest ustawiony w pozycji „Diagnostyka”. Urządzenie umożliwia nie tylko wykrycie faktu zmiany współczynnika konwersji czujnika spowodowanej zmianą modułu piezoelektrycznego, ale również obliczenie jego nowej wartości. Najprostszą techniką jest porównywanie sygnałów podczas podwójnej kontroli: najpierw zaraz po zamontowaniu czujnika, kiedy aktualne są dane jego ostatniej weryfikacji, a następnie po czasie, w którym można spodziewać się zmian parametrów czujnika. Na obu rekordach należy w ten sam sposób wybrać okresy oscylacji N, w każdym z nich określić zakres sygnału (różnicę między wartościami maksymalną i minimalną) i zsumować uzyskane wartości. Jeżeli podczas kontroli wstępnej uzyskano sumę V1, a podczas kontroli powtórnej - V2, współczynnik konwersji w momencie kontroli powtórnej jest równy
gdzie S1 jest wartością współczynnika konwersji uzyskanego podczas weryfikacji [3]. Może być stosowany w analizie wyników pomiarów aż do kolejnej weryfikacji standardu. Innym zastosowaniem urządzenia jest produkcja czujników piezoelektrycznych na etapach montażu i regulacji parametrów. Na ekranie oscyloskopu możesz obserwować reakcję czujnika na trwające operacje tak wyraźnie, jak podczas regulacji filtrów za pomocą zamiatarki. W takim przypadku możliwe jest uzyskanie informacji nie tylko o częstotliwości rezonansowej, ale w pewnym stopniu także o wartości współczynnika konwersji. Dodajemy, że oprócz czujników drgań możliwe jest w niektórych przypadkach sterowanie piezoelektrycznymi czujnikami pulsacji ciśnienia, jednak sterowanie będzie tylko jakościowe: zgodnie z zasadą „dobry awaria”. literatura 1. Subbotin M. Metoda elektrycznego wzbudzania drgań rezonansowych akcelerometru piezoelektrycznego i urządzenie do jej realizacji. Patent Federacji Rosyjskiej nr 2150708. - Biuletyn Wynalazków, 2000, nr 16.
Autor: M. Subbotin, Moskwa; Publikacja: radioradar.net
Sztuczna skóra do emulacji dotyku
15.04.2024 Żwirek dla kota Petgugu Global
15.04.2024 Atrakcyjność troskliwych mężczyzn
14.04.2024
▪ Duże oczy budzą się wcześniej ▪ 60-calowe telewizory LCD od Foxconn i Sharp ▪ Inteligentna bateria naścienna do domu
▪ sekcja serwisu Słowa skrzydlate, jednostki frazeologiczne. Wybór artykułu ▪ artykuł O zaletach fantomów. Sztuka dźwięku ▪ artykuł Jak zmienia się temperatura powietrza wraz z wysokością? Szczegółowa odpowiedź ▪ artykuł Kierowca samochodu-odśnieżarki. Standardowe instrukcje dotyczące ochrony pracy ▪ artykuł Mikrometr elektronowy. Encyklopedia elektroniki radiowej i elektrotechniki ▪ artykuł Igła-tajemnica. Sekret ostrości
Strona główna | biblioteka | Artykuły | Mapa stony | Recenzje witryn
www.diagram.com.ua |







 Zostaw swój komentarz do tego artykułu:
Zostaw swój komentarz do tego artykułu: