|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese
ENCYKLOPEDIA RADIOELEKTRONIKI I INŻYNIERII ELEKTRYCZNEJ Wskaźnik transmisji. Encyklopedia elektroniki radiowej i elektrotechniki
Encyklopedia radioelektroniki i elektrotechniki / Samochód. Urządzenia elektryczne Podstawą do opracowania i produkcji tego wskaźnika dołączonego biegu samochodowej skrzyni biegów było urządzenie opisane w artykule S. Gulyaeva „Wskaźnik dołączonego biegu” („Radio”, 2010, nr 6, s. 41 ). To, że taki wskaźnik przyda się zarówno początkującym, jak i doświadczonym kierowcom, jest w nim na tyle powiedziane, że chce się zrobić i zamontować takie urządzenie w swoim samochodzie. Ale autor proponowanego artykułu chciał go ulepszyć, dodając kilka nowych funkcji. Charakterystyczną cechą proponowanego wskaźnika dołączonego biegu jest wskazanie włączenia nie tylko biegów bezpośrednich, ale także biegu wstecznego, a także hamulca postojowego. Ponadto w niektórych przypadkach na wskaźniku wyświetlane są strzałki, które zalecają kierowcy zmianę biegu na wyższy lub niższy. Gdy w samochodzie zainstalowany jest prosty czujnik położenia neutralnego dźwigni zmiany biegów, sygnalizuje to również wskaźnik. A kiedy silnik pracuje, ale samochód nie jedzie, wskazówka zamienia się w quasi-analogowy obrotomierz.
Schemat wskaźnika pokazano na ryc. 1. Ponieważ zmontowane przeze mnie urządzenie jest zainstalowane w samochodzie VAZ-2110, numery pozycji złączy X1 i X2 oraz numery ich styków odpowiadają schematowi obwodu zestawu wskaźników tego samochodu. Wskaźnik oparty jest na mikrokontrolerze DD1, zasilanym przez wewnętrzny generator zegara RC. Przystępując do pracy program mikrokontrolera konfiguruje piny swoich portów jako wejścia i wyjścia zgodnie z ich przeznaczeniem we wskaźniku, wyłącza nieużywane moduły wewnętrzne. Następnie cyklicznie analizowane są sygnały czujników prędkości i prędkości obrotowej silnika, włącznika świateł cofania, stykowych czujników stanu hamulca postojowego, biegu neutralnego oraz przełącznika trybu kalibracji SA1, sprawdzana jest obecność zworki S1. Na podstawie wyników analizy tych sygnałów na matrycowym wskaźniku LED HG1 powstają obrazy symboli charakteryzujących zawartą transmisję oraz niektóre sytuacje szczególne. Informacje są wyświetlane na wskaźniku HG1 w trybie dynamicznym. W przypadku zastosowania wskaźnika ze wspólnymi anodami LED dla każdej kolumny matrycy, np. TA07-11EWA, zworka S1 powinna być nieobecna. Jednocześnie na każdym z wyjść RB3-RB7 mikrokontrolera program naprzemiennie w określonych odstępach czasu ustawia napięcie na wysoki poziom logiczny, podczas gdy na pozostałych czterech wyjściach poziom jest niski. To wybiera jedną z kolumn LED wskaźnika HG1. To, która z diod wybranej kolumny zostanie zaświecona, określa kod ładowany przez mikrokontroler poprzez wyjścia RA0 i RA1 do rejestru przesuwnego DD2. Niski poziom na wyjściu rejestru oznacza, że dioda aktualnie aktywnej kolumny matrycy połączonej z nią katodą jest włączona, a stan wysoki wyłączony. Po upływie ustawionego czasu program wybiera następną kolumnę i ładuje przeznaczony dla niej kod do rejestru przesuwnego. Ze względu na bezwładność wzroku, wszystkie diody LED tworzące symbol wyjścia wydają się być włączone w tym samym czasie. W przypadku zastosowania wskaźnika ze wspólną katodą diod LED każdej kolumny, np. TC07-11EWA, należy założyć zworkę S1. W takim przypadku impulsy na wyjściach RB3-RB7 i kody załadowane do rejestru przesuwnego DD2 zostaną programowo odwrócone, co jest wymagane do działania takiego wskaźnika.
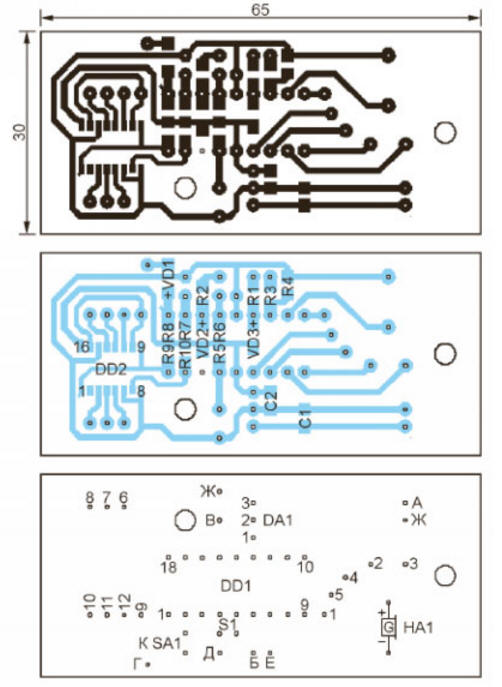
Większość części wskaźnika znajduje się na płytce drukowanej pokazanej na rys. 2, a wskaźnik HG1 z rezystorami wygaszającymi R11-R17 - na oddzielnej małej płytce drukowanej pokazanej na ryc. 3. Płytki są połączone wiązką przewodów, a numery pól stykowych, do których są przylutowane, pokrywają się na obu płytkach z numerami przewodów zgodnie ze schematem na rys. 1. Płytki przeznaczone są do montażu rezystorów i kondensatorów do montażu natynkowego o wielkości 1206. Diody VD1-VD3 oraz rejestr przesuwny DD2 również znajdują się w pakietach do montażu natynkowego.
Tablica ze wskaźnikiem umieszczona jest w miejscu dogodnym dla kierowcy do obserwowania jej wskazań. Płyta główna jest montowana na stojakach z tyłu zestawu wskaźników samochodu lub umieszczana w obudowie o odpowiednich rozmiarach. Połączenia wskaźnika z zestawem wskaźników wykonuje się za pomocą kawałków drutu montażowego. Jeżeli samochód stoi i zaciągnięty jest hamulec postojowy (na katodzie diody VD1 ustawiony jest logicznie niski poziom napięcia), na wskaźniku wyświetlana jest litera P. dodatkowo zwraca uwagę kierowcy. Litera R ma pierwszeństwo przed literą P. Oznacza to, że w przypadku jednoczesnego włączenia biegu wstecznego i hamulca postojowego na wyświetlaczu pojawi się litera R i włączy się klakson. Jeżeli hamulec postojowy lub bieg wsteczny nie są zaciągnięte, a pojazd się nie porusza, wskaźnik zmienia się w pseudoanalogową skalę obrotomierza. Wysokość kolumny podświetlanych diod jest proporcjonalna do prędkości obrotowej silnika. Sygnał impulsowy z czujnika prędkości jest podawany na wejście RA4 DD1 przez rezystor R2 i diodę ochronną VD2. Dla każdego impulsu zwiększana jest zawartość rejestru TMR0 wewnętrznego timera mikrokontrolera. W rezultacie liczba impulsów zliczonych przez timer w określonym czasie jest proporcjonalna do prędkości obrotowej wału korbowego. Jeśli silnik jest zatrzymany, kolumna jest wyłączona. Przy częstotliwości obrotowej nie większej niż 1000 min-1 jego wysokość to jedna dioda LED, przy częstotliwości 1000 ... 2000 min-1 - dwie, przy 2000.3000 min-1 - trzy. I tak dalej aż sześć diod LED przy częstotliwości 5000 min-1. Jeśli częstotliwość przekracza 5500 min-1, cały wskaźnik miga, ostrzegając kierowcę, aby nie zwiększał dalej częstotliwości bez obciążania silnika. Gdy samochód się porusza, sygnał impulsowy z czujnika prędkości jego ruchu jest podawany na wejście RB0 DD1 przez rezystor R1 i diodę ochronną VD3. Program mikrokontrolera zlicza liczbę tych impulsów dla przedziałów czasowych pomiędzy przepełnieniami timera TMR0, które są odwrotnie proporcjonalne do prędkości obrotowej wału korbowego. Wynik obliczeń jest zatem proporcjonalny do stosunku częstotliwości obrotów wału wyjściowego skrzyni biegów do wału korbowego silnika, tj. przy całkowicie włączonym sprzęgle - przełożenie skrzyni biegów. W pamięci EEPROM mikrokontrolera zapisywane są wartości odniesienia, na podstawie porównania, z których program wnioskuje o włączonym biegu (od pierwszego do piątego). Na podstawie aktualnej prędkości obrotowej silnika program analizuje poprawność doboru biegu. Zaleca się poruszanie na pierwszym i drugim biegu przy prędkości obrotowej wału korbowego nie większej niż 3000 min-1. Na trzecim i czwartym biegu dopuszczalna częstotliwość jest zwiększona do 4000 min-1, a jej minimalna wartość na trzecim-piątym biegu przyjmuje się równą 1400 min-1. Po przekroczeniu tych limitów, na wskaźniku liczb, numery dołączonych biegów są zastępowane strzałkami, sugerującymi, że konieczna jest zmiana biegu iw jakim kierunku. Po 1,5.2 s ponownie wyświetlany jest numer uwzględnionego biegu. Gdy pedał sprzęgła jest wciśnięty, wyniki zliczania impulsów mogą nie odpowiadać żadnemu z dostępnych biegów. Sytuację tę sygnalizuje litera C na wskaźniku. Czasami silnik gaśnie podczas jazdy. Przyczyny tego mogą być różne, ale w takiej sytuacji największym niebezpieczeństwem jest utrata skuteczności hamowania. O potrzebie uruchomienia silnika informuje litera D na wskaźniku. Znając przełożenia par biegów skrzyni biegów samochodu oraz charakterystykę zainstalowanych na nim czujników prędkości obrotowej wału korbowego silnika i prędkości ruchu, można z góry obliczyć przykładową liczbę impulsów do określenia włączonego biegu i wprowadzić je do pamięci EEPROM mikrokontrolera podczas programowania. Ale jest inny sposób. Wybierz dość długi, prosty odcinek drogi o małym natężeniu ruchu. Po uruchomieniu silnika zamknij przełącznik SA1. Na wskaźniku pojawi się litera K. Włącz pierwszy bieg i ruszaj. Mikrokontroler zliczy impulsy czujnika prędkości i obliczy średnią arytmetyczną wyników trzech pomiarów. Wskaźnik wyświetli numer przelewu - pierwszy. Nie zatrzymując ruchu, włącz drugi bieg i poczekaj, aż jego numer pojawi się na wskaźniku. Wykonaj te same operacje z pozostałymi biegami, aż do piątego. Następnie wyniki zostaną automatycznie zapisane w pamięci EEPROM. Rozlegnie się sygnał dźwiękowy. Otwórz przełącznik SA1. Wskaźnik jest gotowy do użycia. Czujnik położenia neutralnego dźwigni zmiany biegów może być wykonany z magnesu trwałego i kontaktronu. Magnes jest zamontowany na dźwigni, a kontaktron jest umieszczony w pobliżu, tak aby był zamykany przez pole magnetyczne tylko wtedy, gdy dźwignia znajduje się w położeniu neutralnym. W takim przypadku na wskaźniku zostanie wyświetlona litera N. Program mikrokontrolera można pobrać z ftp://ftp.radio.ru/pub/2013/08/indvkp.zip. Autor: S. Kaszutin
Maszyna do przerzedzania kwiatów w ogrodach
02.05.2024 Zaawansowany mikroskop na podczerwień
02.05.2024 Pułapka powietrzna na owady
01.05.2024
▪ Najbardziej pojemny dysk twardy do systemów samochodowych ▪ Chłodnica laserowa do elektroniki ▪ ISL43640 — 4:1 multiplekser-demultiplekser ▪ Ultraszybkie dyski SSD Samsung PM1725 i PM1633
▪ sekcja serwisu Bezpieczeństwo pracy. Wybór artykułów ▪ artykuł Teofrasta. Słynne aforyzmy ▪ artykuł Jak kurczak z Anglii wywołał panikę na temat rychłego końca świata? Szczegółowa odpowiedź ▪ Papier Belena jest czarny. Legendy, uprawa, metody aplikacji ▪ artykuł Kvasovanie owcze skóry. Proste przepisy i porady
Strona główna | biblioteka | Artykuły | Mapa stony | Recenzje witryn
www.diagram.com.ua |



 Zostaw swój komentarz do tego artykułu:
Zostaw swój komentarz do tego artykułu: