|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese
ENCYKLOPEDIA RADIOELEKTRONIKI I INŻYNIERII ELEKTRYCZNEJ Elektroniczna wędkarska maszyna. Encyklopedia elektroniki radiowej i elektrotechniki
Encyklopedia radioelektroniki i elektrotechniki / Dom, gospodarstwo domowe, hobby Nawet najbardziej nieśmiałe próby przeniesienia na sprzęt elektroniczny niektórych funkcji, które człowiek jest przyzwyczajony uważać za „swoje”, a zatem niezastąpione, powodują ostrożny stosunek do siebie. Wreszcie, dotyczy to wędkarstwa amatorskiego - jednej z najbardziej konserwatywnych form ludzkiego hobby. Chociaż trudno wyobrazić sobie ciekawszą działalność dla projektanta radioamatorów. Począwszy od samego sformułowania pojawiających się tu problemów, od „algorytmizacji intuicji” po testowanie wymyślonego. I to nie w przestrzeni wirtualnej, gdzie tak natarczywie jesteśmy ostatnio wzywani, ale w teraźniejszości: pod błękitnym niebem, wśród lasów i łąk, z pluskającą wodą i rybami bez kodu kreskowego.
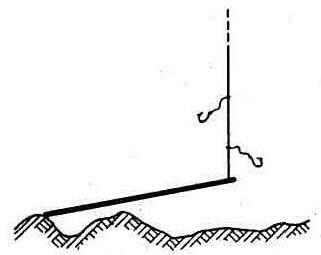
Schemat kinematyczny urządzenia przeznaczonego do automatycznego zacinania ryb w trudnych warunkach połowu przedstawiono na rys.1. Tutaj: 1 - obudowa, w której mieści się całe elektroniczno-mechaniczne „wypychanie” maszyny; 2 - sprężyna płaska, główny napęd maszyny; b - kołyskowy sprężynowy z zaciskiem 7 żyłki wędkarskiej 11, tworzący ze wspornikiem 4, zamontowanym na płycie izolacyjnej 3, parę styków; 8 - pchnięcie z haczykiem 9; 10 - wał skrzyni biegów z gwintem MZ na końcu; 12 - zacisk do mocowania maszyny na pokładzie lub pawęży rufy łodzi. W stanie napiętym maszyna jest utrzymywana przez sprzęgło wału 10 skrzyni biegów z kolczykiem 9. Włączony silnik jest w stanie natychmiast, po kilku obrotach wirnika, rozłączyć to sprzęgło. Ale w którym momencie to się stanie - zadecyduje elektronika maszyny. Algorytm jego działania jest prosty. Pierwszy sygnał elektryczny czujnika, który pojawia się w momencie, gdy wahacz 6 dotyka wspornika 4, przełącza maszynę w stan aktywny: rozpoczyna się odliczanie i liczenie tych dotknięć, których pochodzenie wciąż jest niejasne. Jeżeli ich całkowita liczba - zarówno ingerencja, jak i ugryzienia - w tym aktywnym stanie automatu (czas jego trwania jest ustawiony) nie osiągnie pewnej liczby N (również ustawionej), to automat ponownie przyjmuje stan początkowy - stan oczekiwania. Jeśli ta liczba zostanie osiągnięta, silnik elektryczny zostanie włączony i - zaczepienie. Algorytm ten jest realizowany przez elektroniczne „wypychanie” maszyny, którego schemat ideowy pokazano na ryc. 2. Tutaj: SF1 - para styków "klawisz-wspornik" - czujnik systemowy; SF2 - para styków "wał reduktora-kolczyk" (reduktor i silnik elektryczny są umieszczone na podstawie-izolatorze); SA1 - przełącznik dwustabilny, którego styki SA1.2 po otwarciu wyłączają zasilanie części mocy maszyny po jej skonfigurowaniu, zmianie przynęty itp .; SA2 - przełącznik ustawiający ilość "bitów" - N О{2,3,4}; SA3 - przełącznik na czas trwania aktywnych przedziałów czasu (w sekundach) - T О{2, 4, 8}.
Elementy DD1.1, DD1.2, C2, R4 stanowią pojedynczy wibrator, który eliminuje fałszywe zliczenia w DD3 - w liczniku "ugryzień" - od "odbicia" styków czujnika SF1. Na elementach DD2.2, DD2.3 montowany jest generator impulsów zegarowych o częstotliwości 1 Hz. Licznik DD4, sumując te impulsy, ustawia czas aktywnego stanu maszyny. Zerowanie liczników, powrót maszyny do stanu pierwotnego – stanu oczekiwania – odbywa się impulsami o „pojedynczej” amplitudzie, generowanymi przez elementy DD2.1 i DD1.3. Dzieje się tak albo pod koniec aktywnego czasu (gdy na silniku przełącznika SA3 pojawi się napięcie wysokiego poziomu), albo na początku cięcia (gdy styki SF2 są zerwane) lub gdy maszyna zostanie ręcznie wyłączona za pomocą przełącznik dwustabilny SA1 - zamknięcie pary styków SA1.1. Na elementach DD2.4, DD1.4 i tranzystorach VT3, VT4 montowany jest sterowany (przez wejście 2 element DD2.4) generator tonów, który poprzez wzbudzenie dynamicznej głowicy HA1 sygnalizuje wędkarzowi przejście maszyny do stanu aktywnego. Tranzystory VT1 i VT2 - elektroniczny klucz do sterowania silnikiem elektrycznym M1. Cewka indukcyjna L1 w filtrze LC jest nawinięta na pierścieniowy obwód magnetyczny (średnica zewnętrzna - 10 ... 12 mm) wykonany z ferrytu z m=1000...2000. Jego uzwojenie zawiera 50...100 zwojów drutu PEV-2 0.2...0.3. Płaska sprężyna napędowa (2 na rys. 1) - główny napęd maszyny - wykonana jest z paska brązu fosforowego o grubości 0,8 mm. Jego szerokość wynosi 78, a długość (bez osadzonych końcówek) to 220 mm. Siła początkowa wytwarzana przez sprężynę podczas cięcia wynosi 1,3 kg, „max” – do 750 mm. Węzeł 7 - zwykły terminal z otworem do podania żyłki. Wymiary wspornika kontaktowego nie są krytyczne, ważne jest tylko, aby można było ustawić niezbędne odstępy między jego nakładkami stykowymi a końcem wahacza poruszającego się między nimi: minimum - 1, maksimum - 10 mm. Pozycję wahacza względem styków wspornika można zmieniać poprzez napinanie lub luzowanie sprężyn w węzłach 5. Ogólna wytrzymałość mechaniczna wszystkich tych elementów musi być wystarczająco duża, ponieważ „trzymają” rybę. W każdym razie muszą wytrzymać 10 ... 15-kilogramowe szarpnięcia i uderzenia bez konsekwencji. Oś śruby, na której kołysze się wahacz, musi zapewniać mu minimalny opór. Urządzenie wyzwalające maszyny i umieszczenie jej części w obudowie sklejonej z dostatecznie grubej (8...10 mm) arkusza szkła organicznego lub wysokoudarowego polistyrenu w postaci pudełka z pokrywką łaty pokazano na ryc. 3, za. Silnik elektryczny 1 - dowolna mała mała moc, na przykład z zelektryfikowanej zabawki, mająca mały bieg 7 na osi o średnicy 5 ... 6 i długości co najmniej 5 mm (duży bieg 4 powinien poruszaj się swobodnie wzdłuż niego, odkręcając się od kolczyka). Przed zainstalowaniem silnika elektrycznego należy sprawdzić jakość izolacji jego uzwojenia wirnika - rezystancja upływu musi wynosić co najmniej 1 MΩ. W tej samej zabawce można znaleźć odpowiedni duży bieg, który zapewnia od czterech do pięciu razy spowolnienie. Inne szczegóły spustu: 6 - wałek skrzyni biegów (stal); 2. wewnętrzna podpora (jest przymocowana do „dna” ciała); 3- miękka płaska sprężyna na wale, wypychająca go; 5 - łożysko z brązu lub mosiądzu wciśnięte w ściankę obudowy. Kolczyk sprzęgający wału zębatego z naciągiem sprężynowym może być wykonany zgodnie z wariantem przedstawionym na ryc. 3b. W takim przypadku w pokrywie obudowy należy wykonać otwór o średnicy około 25 mm (jego miejsce na Rys. 1 zaznaczono strzałką A), przez który obracając palcem duże koło zębate skrzyni biegów, koniec jego trzonu jest wkręcony w kolczyk. Jest to zaczep o bardzo wysokiej niezawodności, nie podlega prawie żadnym zewnętrznym wpływom. Według innej opcji (ryc. 3, c) kolczyk, w którym gwint jest zachowany tylko w dolnej części jego eliptycznego otworu, jest po prostu rzucany na koniec wału skrzyni biegów wystający z obudowy.
Podcięcie zaczyna się od pojawienia się "1" - napięcia zbliżonego do napięcia zasilania - na przełączniku SA2 silnika. To napięcie blokuje wejście zliczające licznika DD3 (zgodnie z CP; sygnały z czujnika SF1 nie mogą już zmieniać jego stanu) i otwierając klucz elektroniczny, wykonany na tranzystorach VT1, VT2, włącza silnik elektryczny M1. Na 8 ... 10 obrotów wirnika zespół „wał zębaty-łącznik oporowy” jest rozłączony, a sprężyna napędowa, gwałtownie prostując się, uderza. Ale już w momencie odłączenia tego węzła (para styków SF2) na wejściu 12 elementu DD2.1 występuje napięcie „pojedyncze”, co prowadzi do pojawienia się „1” i na wejściu R licznika DD3. W rezultacie licznik powraca do pierwotnego stanu „zerowego”, „2” zostaje przywrócone na silniku przełącznika SA0 (napięcie zbliżone do potencjału szyny zerowej), tranzystory VT1, VT2 zamykają się i silnik elektryczny, po wykonaniu tylko niezbędne obroty, wyłącza się. Przeładowanie maszyny odbywa się przy wyłączonym przełączniku SA1: jego para styków SA1.1 zwarta w tej pozycji „utrzymuje” elektronikę maszyny w stanie przed uruchomieniem. Opóźnienie automatu, tj. czas pomiędzy pojawieniem się sygnału 1 na przełączniku SA2 silnika a faktycznym zahaczeniem zależy od prędkości i mocy silnika elektrycznego (można go mocno wcisnąć), wyhamowania skrzyni biegów, ilości gwintów wałka włożonych w kolczyk , smarowanie części wirujących i oczywiście stan źródła zasilania. W wyprodukowanym egzemplarzu nie przekraczała 0,2 s. Czułość czujnika SF1 wynosi 10 g/mm (siła – na żyłce, ruch – na uchwycie stykowym). To zależy od miękkości sprężyn wahacza. Źródłem zasilania maszyny wyposażonej w silnik elektryczny 4 V (z zdemontowanej zabawki) może być akumulator składający się z czterech ogniw galwanicznych lub akumulatory zdolne dostarczyć prąd 0,5...1 A podczas krótkotrwałego rozładowania (kilka dziesiątych części sekundy) wartości odżywcze mogą być wyższe. Ale oczywiście nie wyższa niż maksymalna dopuszczalna dla mikroukładów maszynowych. Opisany automat elektroniczny był przez długi czas testowany na morskiej stacji doświadczalnej Instytutu Biologii Morskiej Oddziału Dalekowschodniego Rosyjskiej Akademii Nauk (obszar wodny wysp Popov, Reinike, Rikord itp. ). Połowy prowadzono głównie na ryby denne na głębokościach do 20...25 metrów. I choć cechy wędkarstwa morskiego - kołysanie, przemieszczenie łodzi pod wiatrem, nierówne dno, inne przeszkody - stawiały maszynie dość trudne zadania, praktycznie w niczym nie ustępowała doświadczonym wędkarzom. I często demonstrował swoją wyższość ... Karabin maszynowy wyróżniał się również schludną, prawie nigdy nie niszczącą tkanek życiowych. Okazało się to miłą niespodzianką, ponieważ ryby łapano również do przesadzania do akwarium.
Rysunek pokazuje zwykłe wyposażenie maszyny, zbliżone do przyjętego w Primorye: główna żyłka 0,7 ... 1 mm, smycze - 0,5 ... 0,6 mm 3 ... 5 cm długości, pojedyncze haczyki nr 10. ..12. Ale obciążnik jest inny: stalowy pręt o średnicy 6 ... 8 i długości 250 mm lub więcej. Taki ciężarek i taka pozycja na dnie pozwalają utrzymać napięcie żyłki prawie niezmienione nawet przy zauważalnym podnieceniu. Ale to jest dodatek do elektronicznego „myślenia” samej maszyny. Łowienie ryb „w połowie wody” nie stanowiło dla niego żadnego problemu. Rzeczywistą czułość maszyny można było ocenić po minimalnej wadze łowionych okazów - 50...100 g. Maksymalna waga ryb była ograniczona jedynie siłą cięciwy. Publikacja: cxem.net
Pułapka powietrzna na owady
01.05.2024 Zagrożenie śmieciami kosmicznymi dla ziemskiego pola magnetycznego
01.05.2024 Zestalanie substancji sypkich
30.04.2024
▪ Robot Mongoose przechodzący przez pole minowe ▪ Stent biodegradowalny dla dzieci z chorobami układu oddechowego
▪ sekcja witryny Duża encyklopedia dla dzieci i dorosłych. Wybór artykułu ▪ artykuł Co jest potrzebne do przetrwania w warunkach autonomicznych. Podstawy bezpiecznego życia ▪ artykuł Dlaczego autor Piotrusia Pana obdarzył go właściwością nie dorastania? Szczegółowa odpowiedź ▪ artykuł Podstawowe pojęcia prawa pracy ▪ artykuł Dziecko spawacza. Encyklopedia elektroniki radiowej i elektrotechniki ▪ artykuł 5 + 5 to nie zawsze 10. Sekret ostrości
Strona główna | biblioteka | Artykuły | Mapa stony | Recenzje witryn
www.diagram.com.ua |




 Zostaw swój komentarz do tego artykułu:
Zostaw swój komentarz do tego artykułu: