|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese
ENCYKLOPEDIA RADIOELEKTRONIKI I INŻYNIERII ELEKTRYCZNEJ Komputer pokładowy do roweru elektrycznego. Encyklopedia elektroniki radiowej i elektrotechniki
Encyklopedia radioelektroniki i elektrotechniki / Dom, gospodarstwo domowe, hobby Czytelników zapraszamy do komputera pokładowego na mikrokontrolerze PIC16F876A z zewnętrznym czujnikiem prądu, przeznaczonego do roweru elektrycznego. Na swoim wyświetlaczu wyświetla zarówno parametry ruchu jak i napięcie akumulatora, pobierany z niego prąd, moc i zużycie energii elektrycznej. Urządzenie jest wykonane na dostępnej bazie elementowej i jest łatwe do powtórzenia. Aby kontrolować tryb działania rowerów elektrycznych, stosuje się różne przyrządy pomiarowe. Parametry elektryczne mierzone są za pomocą analizatorów mocy [1, 2], parametry ruchu są kontrolowane przez różne elektroniczne komputery rowerowe [3], a nawet mechaniczne prędkościomierze [4]. Istnieją nawet specjalne wyświetlacze do rowerów elektrycznych [5], pokazujące wszystkie niezbędne parametry, ale mające wysoki koszt. Na tej podstawie opracowałem komputer pokładowy do roweru elektrycznego na mikrokontrolerze PIC16F876A z zewnętrznym czujnikiem prądu. Główne cechy techniczne
W nawiasach podano dyskretność wyświetlania odpowiedniego parametru. Komputer pokładowy pokazuje aktualny czas z rozdzielczością 1 minuty. Schemat komputera pokładowego pokazano na ryc. 1. Mikrokontroler DD2 (PIC16F876A-I/P) jest zasilany przez oscylator stabilizowany rezonatorem kwarcowym ZQ2 o częstotliwości 8 MHz. Złącze XP1 służy do programowania mikrokontrolera. Podłączyłem do niego programator PICkit2. Program mikrokontrolera został opracowany w środowisku graficznym Flowcode [6].
Pomiarów napięcia i prądu dokonuje się za pomocą wewnętrznego 10-bitowego przetwornika ADC mikrokontrolera. Podczas pomiaru napięcia sygnał z dzielnika napięcia R5R9R12 podawany jest na wejście analogowe AN0 (RA0) mikrokontrolera. Podczas pomiaru prądu spadek napięcia na czujniku prądu Rш wzmacnia wzmacniacz operacyjny OPA241 (DA1). Z wyjścia wzmacniacza operacyjnego wzmocniony sygnał trafia na wejście analogowe AN1 (RA1) mikrokontrolera. Wzmocnienie jest ustawiane przez rezystor trymera R13 w obwodzie sprzężenia zwrotnego Oy. Zamiast OPA241 można zastosować prawie każdy pojedynczy wzmacniacz operacyjny typu rail-to-rail w pakiecie SO-8, na przykład OPA340 lub TS507. Program oblicza moc i zużycie energii elektrycznej na podstawie zmierzonych wartości prądu i napięcia. Jako zdalny czujnik prądu zastosowano standardowy bocznik pomiarowy 75SHISV.2-0.5-15 o spadku napięcia 75 mV przy prądzie 15 A. Dowolny standardowy bocznik o rezystancji 5 ... 10 mΩ lub podobny samoczynny wykonany może być użyty jako zamiennik [7]. Komputer pokładowy jest zasilany przez liniowy regulator napięcia utworzony przez tranzystor regulacyjny VT1 i mikroukład TL431ID (DA2). W obwodzie zasilania zainstalowany jest obwód VD1R10C6C7, który zmniejsza hałas generowany przez pracujący silnik elektryczny. Rezystory R16 i R17 zapewniają równomierny rozkład napięcia pomiędzy kondensatorami C6 i C7. Maksymalne dopuszczalne napięcie wejściowe (napięcie akumulatora) zależy od dopuszczalnego napięcia kolektor-emiter tranzystora VT1, jego dopuszczalnego rozpraszania mocy, jakości radiatora i mocy uwalnianej przez rezystory R19-R22. Przy elementach stabilizujących wskazanych na schemacie napięcie akumulatora nie powinno przekraczać 75 V. Urządzenie jest jednak w stanie wyświetlać na wskaźniku wartości do 102,3 V. Komputer pokładowy wykonany jest na jednostronnej płytce drukowanej z włókna szklanego o grubości 1,5 mm. Rysunek drukowanych przewodów płytki oraz rozmieszczenie elementów na niej przedstawiono na rys. 2 i ryc. 3. Na ryc. 4 pokazuje jego wygląd.
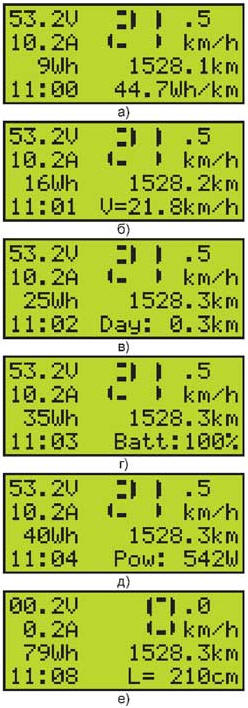
Na przedniej stronie płytki mikrokontroler PIC16F876A, rezonator kwarcowy ZQ2, układ zegara czasu rzeczywistego DS1307, rezystory trymera, tranzystor VT1, złącze XP1 (blok kołków narożnych PLS-5R) i blok PLS-14 do podłączenia wskaźnika HG1 są zainstalowane. Współpracującą część złącza wlutowuje się w otwory montażowe wskaźnika HG1 - żeńskiego bloku PBS-14. W uchwycie BH-1 zainstalowana jest bateria litowa 2032V G3 CR642. Wszystkie pozostałe elementy montowane są od strony drukowanych przewodników. Cylindryczny rezonator kwarcowy ZQ1 (32768 Hz) jest wlutowany w otwory z boku drukowanych przewodników obok pinów 1 i 2 układu DD1. Górna część jego korpusu jest przylutowana do odcinka folii połączonego ze wspólnym przewodem. Płytkę komputera pokładowego mocuje się do płytki LCD na dwóch metalowych stojakach o wysokości 10 ... 12 mm za pomocą śrub M3. Zastosowano rezystory i kondensatory o wielkości 120b do montażu natynkowego. Kondensatory C6 i C7 to natynkowe kondensatory tlenku tantalu w obudowie o rozmiarze E. Można je zastąpić innymi kondensatorami tej samej wielkości o pojemności 6,8... Zamiennikiem tranzystora npn BD139 w regulatorze napięcia może być inny tranzystor o tej samej strukturze w pakiecie TO-126 o dopuszczalnym napięciu kolektor-emiter większym niż 80 V, na przykład BD179, MJE182 2N5192, BF469, KT817G. Pod obudową tranzystora umieszcza się pasek cienkiej blachy miedzianej lub aluminiowej o powierzchni około 6 cm.2służąc jako radiator. Tranzystor mocuje się do płytki za pomocą śruby M3 z nakrętką. Aby zmniejszyć błąd pomiaru bocznik Rшpowinien znajdować się jak najbliżej ujemnego bieguna akumulatora. Wszystkie połączenia z komputerem pokładowym można wykonać za pomocą małych przewodów. Do podłączenia do komputera pokładowego kontaktron SF1 (czujnik ścieżki), bocznik Rш, oraz zastosowano akumulator GB1, złącze PC7TV niewidoczne na schemacie, zamontowane na obudowie komputera pokładowego. Kontaktron został wzięty z uszkodzonego elektronicznego komputera rowerowego. Wskazanie parametrów w komputerze pokładowym wyświetlane jest na czterowierszowym wyświetlaczu LCD WH1604A o napięciu zasilania 5 V bez podświetlenia. Jego brak tłumaczy się wysokim prądem pobieranym przez podświetlenie (220 mA), co prowadziłoby do przegrzania tranzystora VT1. Wyświetlacz LCD jednocześnie wyświetla siedem parametrów: napięcie, prąd, ilość zużytej energii elektrycznej, aktualny czas, prędkość, całkowity przebieg oraz jednostkowe zużycie energii elektrycznej od momentu włączenia komputera pokładowego (patrz rys. 4). Wartość prędkości jest wyświetlana na ekranie za pomocą pseudografiki. Umożliwiło to sprowadzenie wysokości cyfry do dwóch kresek, co znacznie ułatwiło odczytanie prędkości z ekranu. Sterowanie komputerem pokładowym odbywa się za pomocą przycisków SB1 „M” (ustawianie minut), SB2 „H” (ustawianie godzin) i SB3 „P” (tryb wskazań). Naciskając kolejno przycisk SB3 w prawym dolnym rogu ekranu, zamiast jednostkowych kosztów energii elektrycznej (ryc. 5, a), średnia prędkość (ryc. 5, b), dzienny przebieg (ryc. 5, c) ), ładowanie akumulatora (ryc. 5, d) lub moc pobierana przez silnik elektryczny (ryc. 5, e).
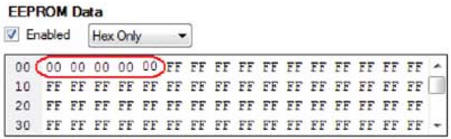
Po naciśnięciu przycisku SB3 na dłużej niż 5 s program wchodzi w tryb zadawania obwodu koła (rys. 5, f). Dalsze przytrzymywanie tego przycisku powoduje zmianę obwodu koła w krokach co 1 cm od 201 do 215 cm (koło 26-calowe). Po pierwszym włączeniu urządzenia obwód koła jest ustawiony na 210 cm Po 5 s od zwolnienia przycisku SB3 następuje wyjście z trybu ustawiania obwodu koła z ustawioną wartością wpisaną do pamięci EEPROM mikrokontrolera. Podczas programowania mikrokontrolera konieczne jest wpisanie zer do pierwszych pięciu komórek pamięci EEPROM (rys. 6) w celu ustawienia początkowej wartości przebytej drogi na zero. Jeśli nie zostanie to zrobione, przebieg wyniesie 1525,7 km.
Program zapisuje przebytą odległość w pamięci EEPROM mikrokontrolera 3 s po zatrzymaniu roweru elektrycznego. Aby wskazać moment nagrania, w prawym górnym rogu wyświetlacza LCD przez 0,3 s pojawia się symbol gwiazdki. Po wyłączeniu zasilania program resetuje wartości jednostkowych kosztów energii elektrycznej, średniej prędkości i dziennego przebiegu. Do ustawienia urządzenia zamiast baterii można użyć zasilacza laboratoryjnego o napięciu wyjściowym 25...50 V i dopuszczalnym prądzie obciążenia co najmniej 5 A. Jako ekwiwalent obciążenia można zastosować mocny rezystor drutowy o rezystancji 5 ... 10 omów. Skonfiguruj urządzenie w następującej kolejności. Najpierw skalibruj woltomierz. W tym celu do urządzenia doprowadza się napięcie z baterii lub z laboratoryjnego źródła zasilania, kontrolując je za pomocą dokładnego woltomierza cyfrowego. Zmieniając rezystancję rezystora strojenia R9, uzyskuje się takie same odczyty przykładowego woltomierza i regulowanego urządzenia. Następnie miernik prądu jest kalibrowany. Dokładny amperomierz cyfrowy jest połączony szeregowo z obciążeniem. Przyłożenie napięcia zasilającego, zmiana rezystancji rezystora strojenia R13, powoduje uzyskanie tych samych wskazań przykładowego amperomierza i regulowanego urządzenia. W razie potrzeby, wybierając rezystor R25, ustawia się optymalny kontrast obrazu na wskaźniku. Komputer pokładowy można zainstalować w dowolnej odpowiedniej plastikowej lub metalowej obudowie. Plik płytki drukowanej komputera pokładowego w formacie Sprint Layout 5.0 i program do mikrokontrolera: ftp://ftp.radio.ru/pub/2016/05/tripcomp.zip. literatura
Autor: A. Nefiediew
Maszyna do przerzedzania kwiatów w ogrodach
02.05.2024 Zaawansowany mikroskop na podczerwień
02.05.2024 Pułapka powietrzna na owady
01.05.2024
▪ Przezroczyste czujniki oparte na szkle Gorilla Glass ▪ Inteligentna koszulka Xenoma e-skin ▪ Rosną koszty elektroniki samochodowej ▪ Monitory iiyama ProLite XU2490HS-B1 i XU2590HS-B1
▪ sekcja strony Narzędzia i mechanizmy dla rolnictwa. Wybór artykułu ▪ artykuł Historia myśli ekonomicznej. Kurs wykładowy ▪ Artykuł Kudzu. Legendy, uprawa, metody aplikacji ▪ artykuł Prostownik na dwa napięcia. Encyklopedia elektroniki radiowej i elektrotechniki
Strona główna | biblioteka | Artykuły | Mapa stony | Recenzje witryn
www.diagram.com.ua |




 Zostaw swój komentarz do tego artykułu:
Zostaw swój komentarz do tego artykułu: