|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese
ENCYKLOPEDIA RADIOELEKTRONIKI I INŻYNIERII ELEKTRYCZNEJ Jednostka sterująca kinematyką inkubatora. Encyklopedia elektroniki radiowej i elektrotechniki
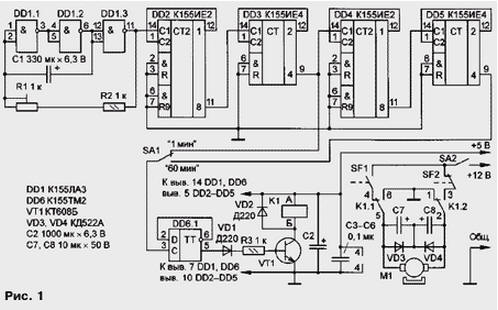
Encyklopedia radioelektroniki i elektrotechniki / Regulatory mocy, termometry, stabilizatory ciepła Ta jednostka elektroniczna jest przeznaczona do automatycznego sterowania obrotem tacek z jajami od pozycji początkowej pod kątem 90 stopni w odstępie jednej godziny. Jedną z wad podobnego urządzenia opisanego w „Radio” (patrz artykuł O. Glagoleva „Elektroniczna automatyka małego inkubatora” w nr 3, 1997, s. 45, 46) jest trudność w regulacji jednostka przełączająca wyłączników krańcowych, które są wyzwalane w celu obliczenia bezwładności silnika elektrycznego. W praktyce jest to bardzo trudne do osiągnięcia, zwłaszcza przy małej prędkości obrotowej siłownika. Opisany poniżej blok jest wolny od tego mankamentu. Podstawa elementu i łatwość wykonania są dostępne nawet dla niezbyt wykwalifikowanych radioamatorów. Jednostka sterująca (patrz schemat na ryc. 1) zawiera drugi generator impulsów oparty na elementach DD1.1-DD1.3, dzielnik częstotliwości na mikroukładach DD2-DD5 o całkowitym współczynniku podziału 3600, wyzwalacz D (DD6.1. 1), przełącznik elektroniczny ( tranzystor VT1), siłownik (przekaźnik K1, silnik M1, wyłączniki krańcowe SF2 i SF60). Urządzenie nie posiada układu wstępnego zerowania liczników, gdyż moment włączenia siłownika w pierwszym cyklu nie ma znaczenia, natomiast kolejne powtarzają się w odstępach 15 min + XNUMX s.
Drugie impulsy z wyjścia elementu DD1.3 podawane są na dzielnik częstotliwości. W zależności od położenia przełącznika SA1, impulsy minutowe lub godzinowe podawane są na wejście wyzwalacza D (element DD6.1) i przełączają go. Napięcie wysokiego poziomu, które występuje na bezpośrednim wyjściu wyzwalacza, otwiera tranzystor VT1, który włącza przekaźnik K1 i utrzymuje go w tym stanie do następnego impulsu. Styki przekaźnika K1.1 poprzez jeden z wyłączników krańcowych, który jest w tym momencie zamknięty (na schemacie - SF2), łączą silnik elektryczny z obwodem mocy. Gdy siłownik dotrze do wyłącznika krańcowego SF2, ten ostatni otwiera się, wyłączając obwód zasilania silnika elektrycznego. Wyłącznik krańcowy SF1, który zamyka się na początku ruchu siłownika, przygotowuje obwód zasilania silnika elektrycznego do nowego cyklu. W kolejnym cyklu na wyjściu przerzutnika D-flop pojawia się napięcie niskiego poziomu: tranzystor zamyka się, przekaźnik zostaje odwzbudzony, styki K1.1 i K1.2 wracają do swojego pierwotnego stanu i ponownie podłączają silnik do obwód zasilania, ale w przeciwnej biegunowości w stosunku do poprzedniego cyklu. Tryb „1 min” jest niezbędny do ustawienia częstotliwości generatora równej 1 Hz za pomocą rezystora strojenia R1, a podczas pracy - do zainstalowania tac w pozycji poziomej. Silnik jest w tym przypadku wyłączany wyłącznikiem SA2. Kondensatory C7 i C8 tłumią zakłócenia w obwodzie zasilania pracującego silnika. Wszystkie części urządzenia, z wyjątkiem diod VD3, VD4, kondensatorów C7, C8, wyłączników krańcowych i wyłączników SA1, SA2, są zamontowane na płytce drukowanej wykonanej z folii z włókna szklanego o wymiarach 65x80 mm (rys. 2). Na płytce znajdują się otwory „a” i „b” do montażu kondensatora C2.
Przekaźniki RES-48 (paszport RS4.590.204 lub RS4.590.216), RES-9 (RS4.529.02903, RS4.529.029-10, RS4.529.029-12, RS4.529.029-15, RS4.529.029-16 lub RS4.529.029 -19) o napięciu roboczym 5 V. Dopuszczalne jest zastosowanie przekaźnika o napięciu roboczym 12 V. W tym przypadku jego uzwojenie jest zasilane z tego samego źródła co silnik elektryczny. Kondensatory C1, C2 - K50-35, C7, C8 - K50-6, reszta to ceramika. Rezystor trymera R1 - SP5-2. Wyłączniki krańcowe SF1 i SF2 - mikroprzełączniki MP1-1. Wyłączniki SA1 i SA2 - przełączniki dźwigienkowe MT1. Silnik elektryczny - DPM-25N3-0,1 A. Istnieje możliwość zastosowania silnika AC na napięcie 220 V z przekładnią np. DSM2U42-P-220 50 Hz o mocy 4 V∙A. W takim przypadku urządzenie powinno zastąpić przekaźnik triakiem i wykorzystać oba wyjścia wyzwalacza DD6.1 (rys. 3). Schemat kinematyczny siłownika dla tej opcji pokazano na rys. 4. Tarcza napędowa A jest sztywno połączona z wałem przekładni silnika i obraca się tylko w jednym kierunku. Obrót tarczy A o 180 stopni odpowiada obrotowi napędzanej tarczy B o 90 stopni. Dalszy obrót dysku głównego powoduje obrót dysku podrzędnego w przeciwnym kierunku. Podane wymiary są określone doświadczalnie. Przy każdym typie silnika konieczne jest, aby czas obrócenia siłownika o 90 stopni (tj. odstęp czasowy między przełączeniami wyłączników krańcowych) nie przekraczał 1 minuty. Do zasilania urządzenia odpowiednie jest dowolne źródło na dwa napięcia: stabilizowane 5 V i niestabilizowane 12 V. Przy wymianie przekaźnika na RES-9 należy częściowo zmodyfikować schemat płytki drukowanej. Autor: A. Grigoriev, Bałaszow, obwód saratowski
Sztuczna skóra do emulacji dotyku
15.04.2024 Żwirek dla kota Petgugu Global
15.04.2024 Atrakcyjność troskliwych mężczyzn
14.04.2024
▪ Opaski silikonowe mierzą jakość powietrza ▪ Inteligentna poduszka Nitetronic F1 ▪ Niebieskie bezprzewodowe słuchawki satelitarne
▪ część witryny Uwaga dla ucznia. Wybór artykułu ▪ artykuł Drzwi obrotowe. Historia wynalazku i produkcji ▪ artykuł Jak zbudowano egipskie piramidy? Szczegółowa odpowiedź ▪ artykuł Kierownik Katedry Budownictwa Kapitałowego. Opis pracy ▪ artykuł Wentylator na karcie graficznej. Encyklopedia elektroniki radiowej i elektrotechniki ▪ artykuł Hybrydowy liniowy wzmacniacz mocy. Encyklopedia elektroniki radiowej i elektrotechniki
Strona główna | biblioteka | Artykuły | Mapa stony | Recenzje witryn
www.diagram.com.ua |


 Zostaw swój komentarz do tego artykułu:
Zostaw swój komentarz do tego artykułu: