|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese
ENCYKLOPEDIA RADIOELEKTRONIKI I INŻYNIERII ELEKTRYCZNEJ Uniwersalny statecznik elektroniczny z ciepłym startem do świetlówek T8. Encyklopedia elektroniki radiowej i elektrotechniki
Encyklopedia radioelektroniki i elektrotechniki / oświetlenie Autor proponuje projekt statecznika elektronicznego do świetlówek T8, zmontowanego na specjalistycznym mikroukładzie ICB1FL02G. Urządzenie wyposażone jest w aktywny korektor mocy, zapewnia ochronę przed trybami awaryjnymi oraz posiada siedem różnych opcji podłączenia lamp o różnej mocy. Statecznik elektroniczny - statecznik elektroniczny, często nazywany statecznikiem elektronicznym, służy do zapalania i podtrzymywania trybu pracy gazowych lamp wyładowczych (w tym przypadku świetlówek). Zalety statecznika elektronicznego w porównaniu z konwencjonalnym dławikiem i rozrusznikiem są oczywiste, takie jak brak migotania lampy podczas rozruchu, wyższy współczynnik mocy, znacznie niższy współczynnik tętnienia strumienia świetlnego, a także niższy koszt itp. W dzisiejszych czasach prawie każda świetlówka, czy to biurowa, czy domowa, jest wyposażona w statecznik elektroniczny. Pod względem obwodów elektrycznych masowo produkowane stateczniki elektroniczne można podzielić na dwie kategorie. Pierwszy to przetwornica półmostkowa z autostartem na dwóch potężnych tranzystorach wysokonapięciowych serii 13007 z pasywnym korektorem mocy. Stateczniki tego typu są najtańsze i najpowszechniejsze, pracujące na częstotliwości 36...38 kHz. Drugi - droższe stateczniki elektroniczne, montowane na wyspecjalizowanych mikroukładach, mają aktywny korektor mocy i funkcję „ciepłego” startu. Zwykle mają częstotliwość oscylatora 36...48 kHz i wyróżniają się bardzo niskim współczynnikiem pulsacji strumienia świetlnego - 2...5%. Dla porównania: dla lampy włączanej konwencjonalnym dławikiem i rozrusznikiem pulsacje strumienia świetlnego wynoszą około 40…60%, przy tanim stateczniku elektronicznym – około 15%. Wersja statecznika elektronicznego na specjalistycznym mikroukładzie zostanie omówiona w tym artykule. Główne cechy techniczne
Statecznik jest montowany na specjalistycznym mikroukładzie-kontrolerze statecznika elektronicznego do lamp fluorescencyjnych - ICB1FL02G, opracowanym przez firmę Infineon. Stateczniki na tym chipie są podobne w obwodach do stateczników na chipach International Rectifier, na przykład IR2168, IR2166, ale wymagają mniej elementów zewnętrznych i, jak pokazuje praktyka, są bardziej stabilne i niezawodne (jest to subiektywna opinia autora). Schemat urządzenia pokazano na ryc. 1. Jej głównym wyróżnikiem jest siedem konfiguracji (opcji) podłączenia lamp: 1x18 (jedna świetlówka T8 o mocy 18 W), 1x36, 1x58, 2x18, 2x36, 3x18, 4x18 (rys. 2). Szczegółowy opis działania mikroukładu podano w [1]. Działanie statecznika można podzielić na trzy etapy: wstępne nagrzewanie katod lampy, zapłon i tryb pracy. Podgrzewanie jest realizowane w następujący sposób. Natychmiast po włączeniu generator zegara mikroukładu zaczyna działać z częstotliwością około 125 kHz. Po 10 ms jego częstotliwość płynnie spada do 65 kHz - jest to częstotliwość podgrzewania, którą ustawia rezystor R22. Ta wartość jest znacznie wyższa niż częstotliwość rezonansowa wyjściowego obwodu statecznika L2C14, więc napięcie przyłożone do katod lamp nie wystarczy do ich zapalenia. Rozpoczyna się wstępne nagrzewanie lamp, którego czas trwania jest ustawiany przez rezystor R26 i jest wybierany w zakresie od 0 do 2 s (w naszym przypadku 1 s). W tym czasie częstotliwość pozostaje bez zmian. W okresie wstępnego nagrzewania katody lamp zostaną wystarczająco nagrzane prądem o wysokiej częstotliwości, a gaz w lampach zacznie częściowo jonizować. W rezultacie kolejny zapłon nastąpi w trybie mniej „stresującym” dla żarników lamp i przy mniejszych skokach prądu przez tranzystory VT2, VT3. Funkcja wstępnego nagrzewania znacznie, czasem kilkukrotnie, zwiększa żywotność świetlówki.
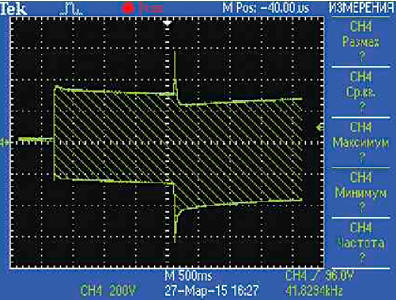
Po czasie wstępnego nagrzewania wynoszącym kolejne 40 ms, częstotliwość zegara mikroukładu zacznie ponownie spadać. Gdy zbliża się do częstotliwości rezonansowej obwodu L2C14, napięcie przyłożone z płytek kondensatora C14 do katod lamp zacznie gwałtownie rosnąć, a gdy osiągnie 600 ... 800 V, nastąpi zapłon. Jeśli w tym momencie napięcie na czujniku prądu - rezystorze R27 osiągnie wartość progową 0,8 V, a może się to zdarzyć na przykład podczas próby włączenia statecznika bez obciążenia lub awarii jednej z lamp, sterownik mikroukładu przestań dalej zmniejszać częstotliwość przetwornicy i zacznij ją ponownie zwiększać, co z kolei spowoduje spadek napięcia na kondensatorze C14. Ma to na celu uniknięcie nadmiernych skoków prądu i napięcia na wyjściu przetwornicy. Kiedy spadek napięcia na rezystorze R0,8 spadnie poniżej 27 V, częstotliwość ponownie spadnie. Proces ten można powtarzać kilka razy, aż do uzyskania pomyślnego sygnału zapłonu. Sygnałem tym jest pojawienie się prądu sinusoidalnego o amplitudzie nie większej niż 2,5 mA na wejściu LVS1 (LVS – Lamp Voltage Sense, pin 13) DA1 oraz napięcia trapezowego o wahaniu nie większym niż 3,2 V na wejściu RES (RESTART, styk 12) DA1 . Maksymalny czas zapłonu może wynosić do 235 ms. W przypadku nieudanego zapłonu lamp mikroukład przejdzie w tryb awaryjny i zatrzyma przełączanie tranzystorów VT2 i VT3. Po pomyślnym zapłonie DA1 przełączy się w tryb pracy, częstotliwość generatora zegara spadnie do wartości roboczej, którą ustawia rezystor R18. Wszystkie trzy etapy pracy statecznika: rozgrzewanie, zapłon i tryb pracy ilustruje oscylogram na rys. 3 (oscyloskop jest podłączony do pinów 3, 9 złącza XS1). na ryc. 4 przedstawia przebieg napięcia w stanie ustalonym podczas pracy z czterema lampami o mocy 18 W każda.
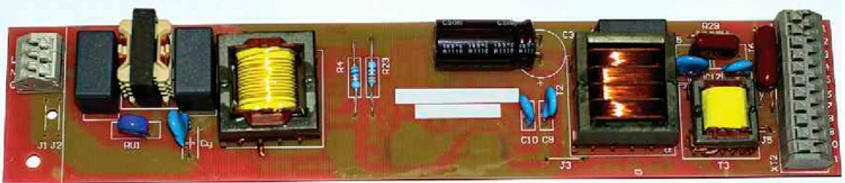
W trybie pracy aktywowane są dodatkowe funkcje zabezpieczające: EOL (End Of Life) - koniec żywotności lampy, ochrona przed pracą w trybie pojemnościowym, ochrona przed prostowniczym działaniem lamp. W przypadku gwałtownego wzrostu prądu płynącego przez lampę, który może wystąpić pod koniec jej żywotności, prąd w obwodzie wzrośnie do 215 μA: plus zasilacz, R14, R16, R21, R23, R30, lampa żarnik, R17, R15, R13, R12, wewnętrzny układ czujnika prądu DA1. Spowoduje to wyzwolenie zabezpieczenia EOL i wyłączenie statecznika. Jeśli dodatnie i ujemne półcykle prądu płynącego przez ten obwód nie mają równej amplitudy, oznacza to, że lampa działa w trybie prostownika. Innymi słowy, przez lampę przepływa większy prąd w jednym kierunku niż w drugim. Efekt ten jest spowodowany przedwczesnym zużyciem jednej z katod lampy. W takim przypadku balast również przechodzi w tryb awaryjny. Jeśli podczas pracy statecznika styk w obwodzie lampy zostanie zerwany, na przykład z powodu wadliwej oprawki lampy lub przepalenia jednego z żarników, rezystancja obwodu gwałtownie wzrośnie, a stopień wyjściowy przełączy się na pojemnościowy pracy, co z kolei może powodować rezonans. W takim przypadku napięcie na wejściu RES przekroczy poziom 1,6 V, co spowoduje zadziałanie zabezpieczenia i wyłączenie statecznika. Dodatkowo wejścia LVS1 i RES układu DA1 służą do sterowania podłączeniem lamp przez cały czas pracy statecznika. Jeśli jedna z lamp zostanie usunięta podczas pracy statecznika, statecznik wyłączy się. Korektor mocy czynnej jest montowany na transformatorze T1, tranzystorze VT1, diodzie VD2 i kondensatorze C5. Jego celem jest jak najbardziej zbliżenie kształtu pobieranego prądu do kształtu napięcia, zmniejszenie przesunięcia fazowego między prądem a napięciem, a tym samym minimalizacja mocy biernej. Zasada jego działania została szczegółowo opisana w [1] i [2]. Cechą tego korektora jest możliwość pracy zarówno w trybie przewodzenia krytycznego (CCM), jak i w trybie przewodzenia nieciągłego (DCM). Dzielnik R8-R11C6 służy do kontrolowania chwilowej wartości napięcia zasilania i określania czasu zamknięcia tranzystora VT1. Uzwojenie wtórne transformatora T1, podłączone przez rezystor ograniczający prąd R3 do wejścia PFCZCD (pin 7) DA1, jest niezbędne do określenia momentu, w którym prąd płynący przez uzwojenie pierwotne transformatora osiągnie zero. Gdy tylko to nastąpi, impuls otwierający zostanie zastosowany do bramki tranzystora VT1. Oba uzwojenia transformatora T1 muszą być w fazie. Mikroukład jest zasilany w pierwszej chwili po włączeniu z obwodu R1, R2, R5. W przyszłości - od stopnia wyjściowego przez stabilizator C12C13R28VD5VD6C10. Aby podłączyć cztery lampy do statecznika, producent mikroukładu zaleca zastosowanie dwóch wyjściowych obwodów statecznika połączonych równolegle, w każdym obwodzie znajdują się dwie lampy połączone szeregowo [1]. Ale wtedy pojawia się następny problem. Nawet przy niewielkiej rozpiętości parametrów wyjściowego obwodu LC, pary lamp mogą zapalać się niejednocześnie, co nie jest zbyt przyjemne dla percepcji. Z drugiej strony cztery lampy połączone szeregowo są dość problematyczne w zapaleniu, ponieważ nie mają czasu na wystarczające rozgrzanie podczas podgrzewania, a do zapalenia potrzeba znacznie więcej energii. Ponadto nie wolno nam zapominać o stratach na przewodach łączących. Rozwiązaniem było pozostawienie jednego obwodu wyjściowego, ale dodanie pomocniczego transformatora obniżającego napięcie o małej mocy T2. Kompensuje straty na styku lamp, poprawia nagrzewanie się lamp i ułatwia ich zapłon. Eksperymentalnie ustalono, że moc transformatora T2 powinna wynosić 8 ... 10% całkowitej mocy lamp, współczynnik transformacji wynosi 20.30. Przy podłączaniu lamp 1x18, 2x18, 1x36 do statecznika należy usunąć transformator T2 i kondensatory sprzęgające C11, C16 i C18, aby uniknąć zasilania lamp nadmiernym napięciem. Dokumentacja [1] zawiera obliczenia wszystkich głównych elementów statecznika, z wyjątkiem obwodu wyjściowego L2C14. Indukcyjność cewki indukcyjnej L2 i pojemność kondensatora C14 oblicza się w następujący sposób. Maksymalna moc lampy (4x18 lub 2x36) P=72 W, wybrana częstotliwość pracy f=41 kHz, częstotliwość zapłonu fzapalić=48 kHz [1], stosując „ciepły” start, optymalne napięcie zapłonu Uzapalić≈700 V. Ze stosunku energii otrzymujemy E = P/f = C U2/ 2, stąd C14 = 2P/(fzapalić· Uzapalić2) = 2 72/(48 103· 7002) ≈ 6,1 nF. Spośród dostępnych kondensatorów wybrano kondensator 6,8 nF. Teraz określamy indukcyjność cewki indukcyjnej L2. Częstotliwość jest fa = 1/(2π√LC), stąd L2 = 1/(4π2C f2) = 1/(4π26,8 412· 106) = 2,2 mH. Z drugiej strony indukcyjność dławika balastowego musi spełniać warunek L2 = (UPete - Uл) totwarty/Iл , gdzie jesteśPete - napięcie zasilania; Uл - napięcie robocze na lampach (napięcie robocze lampy 18 W jest w przybliżeniu równe około 56 V, dlatego Uл=4 56=224 V); totwarty - czas otwarty tranzystora przy f=41 kHz, totwarty ≈11,5 µs (wg [1]); Iл≈0,33 A - prąd pracy lampy. Stąd L2 = (290 - 224) 11/330 = 2,2 mH. Określamy maksymalny prąd cewki indukcyjnej L2, będzie on równy prądowi kondensatora C14 w momencie rezonansu IL2 =Urez2π frezdo = 700 2π 48 1036,8 10-9 = 1,4 A. Wybieramy rdzeń magnetyczny odpowiedni do ogólnej mocy, na przykład EV25/13/13. Oszacujmy wymagany prześwit g: g = (4 10-4π L Imax2)/(S B2), gdzie S jest polem przekroju obwodu magnetycznego, m (dla EV25/13/13 S=75 mm2); B - maksymalna indukcja, T; L - indukcyjność, H; Imax - prąd maksymalny, A. Przyjmijmy indukcję B = 0,22 T. Dostać g = (4 10-4π 2,2 10-3· 1,42)/(75 10-6· 0,222) = 1,5 mm. Oblicz liczbę zwojów N cewki indukcyjnej L2: L=N2·ZAL, stąd N = √(LAL) ; AL =(DoL0λ)/(μeg) gdzieL - indukcyjność na zwój (obwód magnetyczny z przerwą), H; AL0 - indukcyjność na zwój (obwód magnetyczny bez przerwy, informacje z podręcznika), H; λ to długość średniej linii elektroenergetycznej obwodu magnetycznego, mm; μe - początkowa przenikalność magnetyczna materiału obwodu magnetycznego (informacje z podręcznika). Do rdzenia magnetycznego EV25/13/13, materiał N87 - AL0=2400 nH, λ=59 mm, μe= 1520. Stąd AL = (2400 10-959 10-3)/(152 1,5 10-3) = 6,7 10-8 gn, N = √(2,2·10-3/6,7 10-8) = 181 obrotów. Sprawdźmy maksymalną indukcję B = (Imax·μ0N)/g, gdzie μ0 = 4π 10-7 H/m; B = (1,4 4π 10-7181)/(1,5 10-3) = 0,212 T Cewka indukcyjna jest uzwojona drutem 4x0,2 mm (cztery druty o średnicy 0,2 mm). Jeśli to możliwe, pożądane jest podzielenie uzwojenia na sekcje. Urządzenie zmontowane jest na płytce drukowanej wykonanej z jednostronnie laminowanego włókna szklanego. Schemat płytki drukowanej pokazano na ryc. 5. Wszystkie elementy do montażu natynkowego znajdują się po stronie przewodów drukowanych, wszystkie elementy wyjściowe po przeciwnej stronie. Rozmieszczenie elementów pokazano na ryc. 6. Zdjęcia zmontowanego urządzenia przedstawiono na rys. 7 i ryc. 8. Kondensator C14 - metalowa folia, na napięcie 1600 V, kondensatory C11-C13 - metalowa folia lub dysk ceramiczny na napięcie 1000 V, kondensatory C16, C18 - 100 V. Diody VD2, VD4 - szybkie z dopuszczalne napięcie wsteczne co najmniej 600 V. Tranzystory FQD5N50 (VT1-VT3) można zastąpić SPP03N60C3 lub podobnymi. Transformator T1 jest uzwojony na rdzeniu magnetycznym E25/13/7, materiał N27, szczelina niemagnetyczna 1,6 mm. Uzwojenie pierwotne zawiera 184 zwoje drutu 4x0,2 mm, wtórne - 14 zwojów drutu o średnicy 0,3 mm. Transformator T2 jest uzwojony na obwodzie magnetycznym E16/8/5, materiał N27, bez przerwy. Uzwojenie 1-2 zawiera 208 zwojów, uzwojenia 11 - 14, 6 - 7, 10 -13 - 24 zwoje, uzwojenia 4 - 5, 8 - 9 - 12 zwojów. Średnica drutu wszystkich uzwojeń wynosi 0,18 mm. Rezystory do ustawiania częstotliwości R18, R22, R26, pożądane jest, aby wybrać z tolerancją 0,5-1%. Prawidłowo zmontowane urządzenie zwykle zaczyna działać od razu i nie wymaga regulacji.
literatura
Autor: V. Lazarev
Maszyna do przerzedzania kwiatów w ogrodach
02.05.2024 Zaawansowany mikroskop na podczerwień
02.05.2024 Pułapka powietrzna na owady
01.05.2024
▪ Mężczyźni rzadziej niż kobiety rozpowszechniają negatywne informacje ▪ Hybrydowa ciężarówka Volvo Concept Truck
▪ sekcja serwisu Systemy akustyczne. Wybór artykułów ▪ artykuł Od dzieciństwa nie lubiłem owalu, od dzieciństwa rysowałem kąt. Popularne wyrażenie ▪ artykuł W jaki sposób efekt Pauliego uniemożliwił sam dowcip Pauliego? Szczegółowa odpowiedź ▪ artykuł Kasjer z kasą. Standardowe instrukcje dotyczące ochrony pracy ▪ artykuł System alarmowy w KR1850BE35. Encyklopedia elektroniki radiowej i elektrotechniki ▪ artykuł Paradoks z liczbami Fibonacciego. Sekret ostrości
Strona główna | biblioteka | Artykuły | Mapa stony | Recenzje witryn
www.diagram.com.ua |






 Zostaw swój komentarz do tego artykułu:
Zostaw swój komentarz do tego artykułu: