|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese
ENCYKLOPEDIA RADIOELEKTRONIKI I INŻYNIERII ELEKTRYCZNEJ Ewolucja zasilaczy impulsowych flyback
Encyklopedia radioelektroniki i elektrotechniki / Zasilacze Artykuł, na który zwrócono uwagę czytelników, poświęcony jest zasilaczom impulsowym typu flyback, szeroko stosowanym w zasilaczach telewizorów, komputerów i innego sprzętu elektronicznego. Takie źródła są również popularne wśród radioamatorów. W artykule skupimy się na zasilaczach montowanych na mikroukładach KR1033EU10 i VIPer-100A oraz ich obliczeniach za pomocą specjalistycznego pakietu oprogramowania. STEROWNIK PWM KR1033EU10(iC3842) Zasilacze impulsowe (SMPS) rozpowszechniły się już w połowie ubiegłego wieku. A dzisiaj SMPS przechodzą ewolucyjne zmiany prawie co roku. Każda klasa SMPS, raz zdobywszy swoją niszę, pozostaje w niej na zawsze, a przynajmniej na długo, i rozwija się niemal niezależnie. Zwykle stosuje się mostkowe zasilacze SMPS o dużej mocy (150 W lub więcej). Odwrotne zasilacze SMPS są częściej używane jako małej mocy i średniej mocy (do 150 W). Teraz elementarna baza takich źródeł jest aktualizowana tak szybko, że zwykły radioamator i krajowy przemysł radiowy śledzą te zmiany w swoim rozwoju z dużym opóźnieniem. Zintegrowane kontrolery PWM KR1033EU5 (zagraniczny analog - TDA4605), które zostały opisane w artykule [1], nie zostały jeszcze wprowadzone do domowych urządzeń gospodarstwa domowego, ponieważ w zagranicznych urządzeniach wideo, a zwłaszcza monitorach wideo, ich nowa odmiana jest już szeroko stosowana - UC3842, KA3842 i UC3844, KA3844 (odpowiednio krajowe odpowiedniki KR1033EU10 i KR1033EU11). Zewnętrznie i zasadniczo nie różni się od prototypu, stosunkowo nowe kontrolery PWM przeszły szereg ulepszeń. A jeśli już wielu radioamatorów spotkało się z prototypem na łamach „Radia” w [2], to opisy SMPS ze sterownikami PWM serii UC384X nie zostały jeszcze opublikowane, z wyjątkiem [3], gdzie podane mikroukład jest używany w nieco niekonwencjonalny sposób - jako regulator dla regulatora napięcia przełączającego obniżającego napięcie. Rozważmy pokrótce główne właściwości i różnice mikroukładu KR1033EU10 (UC3842, KA3842), który nadal będziemy nazywać EU10, od KR1033EU5 (TDA4605), określanego jako EU5. Oba mikroukłady są wykonane w plastikowej obudowie 2101.8-1 (zgodnie z terminologią zagraniczną - DIP-8). Przeznaczenie kołków EU10 podano w tabeli.
główne cechy
Kontroler EU10 PWM, podobnie jak EU5, jest przeznaczony do podłączenia n-kanałowego tranzystora polowego z izolowaną bramką i zasadniczo ma tę samą funkcjonalność. Zwróć uwagę na pierwszą cechę EU10. Częstotliwość konwersji w SMPS na EU5 jest ustawiana automatycznie w zależności od napięcia zasilania sieciowego, parametrów mikroukładu i tranzystora przełączającego, indukcyjności uzwojenia pierwotnego transformatora impulsowego, zużycia energii w obciążeniu itp. Dlatego pod wpływem czynników destabilizujących częstotliwość konwersji okazuje się „zmienna”: dla dowolnego SMPS-a wykonanego na EU5, w zależności tylko od mocy obciążenia, może przyjmować wartość od maksymalnie 18 kHz do 70 kHz. przy minimalnym obciążeniu. Ta cecha nieco komplikuje konstrukcję transformatora takiego SMPS, dlatego zwykle najpierw przeprowadza się dla niego przybliżone obliczenia i prototypowanie, a następnie, na podstawie wyników testów z rzeczywistym obciążeniem, dokonuje się niezbędnych korekt. W mikroukładzie EU10 robocza częstotliwość konwersji jest ustawiana przez zewnętrzny obwód RC do ustawiania częstotliwości podłączony do pinu 4. Ponieważ rezystor obwodu RC jest podłączony do wewnętrznego źródła precyzyjnego napięcia odniesienia 5 V - pin 8, niezależnie od różnych destabilizujących czynniki, operacyjna częstotliwość konwersji jest sztywno ustalona. na ryc. 1, a pokazuje wykładniczą postać napięcia Uc na kondensatorze nastawczym częstotliwości, odpowiadającą impulsom przełączającym na wyjściu kontrolera PWM (pin 6 Uout), pokazanym na ryc. 1, b.
Aby scharakteryzować tryb pracy kontrolera PWM, wygodnie jest użyć cyklu pracy impulsów przełączających D - jest to parametr, który jest odwrotnością ich cyklu pracy. Wartość współczynnika wypełnienia jest zawsze mniejsza niż jeden. Nie zaleca się jednak wybierania go powyżej 0,5 [3]. W obwodzie wyjściowym regulatora PWM KR1033EU11 (UC3844) wprowadzono dodatkowy wewnętrzny wyzwalacz zliczający, który ogranicza współczynnik wypełnienia D≤0,5, ale jednocześnie obwód zadawania częstotliwości RC obliczany jest dwukrotnie (w stosunku do częstotliwość powtarzania impulsów przełączających) częstotliwość pracy wewnętrznego generatora. Kończąc ogólny krótki opis kontrolerów PWM serii UC384X, zauważamy, że UC3843 jest podobny do UC3842, a UC3845 jest podobny do UC3844, ale są one zaprojektowane dla niższego napięcia zasilania. Dla nich poziom progowy napięcia zasilania podczas przejścia do stanu „On” dla poszczególnych próbek wynosi 7,8 ... 9 V (średnia wartość 8,4 V), „Off” - 7 ... 8,2 V (średnia wartość - 7,6 V). Wyjaśnijmy pojęcie stabilności szumowej kontrolera PWM (rys. 1). Podczas toff kondensator ustawiania częstotliwości ładuje się od około 1,5 V, dolnego progu wewnętrznego komparatora, do górnego progu około 2,75 V. W tym momencie wyjście kontrolera PWM jest niskie. Gdy napięcie na kondensatorze Uc osiągnie górny poziom progowy, włącza się wewnętrzny obwód rozładowania i kondensator rozładowuje się do około 0,75 V. Napięcie na wyjściu regulatora PWM w tym momencie przechodzi w stan pojedynczy. Następnie w czasie tON. dopóki napięcie na kondensatorze nie osiągnie dolnego poziomu progowego, tranzystor przełączający jest włączony. Z rysunku widać, że sygnał zakłócający Up o napięciu 0,1 ... 0,5 V na końcu cyklu ładowania może spowodować przedwczesne zadziałanie obwodu rozładowania i fałszywy start generatora wewnętrznego, co pokazano liniami przerywanymi. Ta właściwość jest główną wadą tej klasy kontrolerów PWM, ale można ją znacznie osłabić na kilka sposobów. Najpierw kondensatory ceramiczne (o niskiej indukcyjności) o pojemności około 7 mikrofaradów są podłączone do pinów 8 i 0,1 mikroukładu. Po drugie, spełniają pewne wymagania dotyczące topologii płytki drukowanej i konstrukcji SMPS, które zmniejszają amplitudę sygnałów zakłócających, co zostanie wyjaśnione później. Po trzecie, pojemność kondensatora ustawiającego częstotliwość jest wybierana na co najmniej 1000 pF. A najbardziej niezawodnym sposobem na całkowite wyeliminowanie tej wady jest synchronizacja częstotliwości roboczej regulatora PWM z zewnętrznym źródłem napięcia pulsacyjnego, co szczegółowo opisano w [4]. Drugą zasadniczą różnicą między EU10 jest sposób monitorowania prądu roboczego w SMPS. W EU5 zmiana prądu w uzwojeniu magazynującym transformatora jest symulowana przez zewnętrzny obwód RC, a jeśli te elementy zostaną dobrane nieprawidłowo, tranzystor przełączający może ulec awarii. W układzie EU10 wprowadzono specjalny komparator kontroli prądu, który ma dwa wejścia - odwracające i nieodwracające. Pin 3 jest wewnętrznie podłączony do wejścia komparatora nieodwracającego. Na zewnątrz podłączony jest do niego rezystancyjny lub transformatorowy czujnik prądu w obwodzie źródłowym tranzystora przełączającego. Gdy tylko napięcie sygnału z czujnika prądu przekroczy wartość progową 1 V, odpowiadającą wartości szczytowej prądu w obwodzie drenu tranzystora, komparator wyłączy wzmacniacz wyjściowy regulatora PWM. Na przykład dla tranzystora z ograniczeniem prądu drenu wynoszącym 4 A, wartość szczytowa odpowiadająca poziomowi wyzwolenia zabezpieczenia jest wybrana na 3,7 A. Jeśli SMPS jest przeciążony, to wyzwolenie nastąpi w każdym impulsie, zapobiegając uszkodzeniu układu przełączającego tranzystor. Poziom działania zabezpieczenia prądowego można regulować zmieniając rezystancję rezystora w obwodzie drenu tranzystora lub zmieniając współczynnik przenikania czujnika przekładnika prądowego. I ostatnia, trzecia cecha EU10, wynikająca z drugiej, to sposób regulacji napięcia na wyjściu SMPS. Zauważ, że zasada regulacji pozostaje taka sama - kontrola szerokości impulsu. Jeżeli EU5 steruje zakończeniem przekazywania kolejnej części energii przez przejście napięcia w uzwojeniach wtórnych przez zero i następnie oddaje taką nową porcję w celu utrzymania napięcia na wyjściu uzwojenia komunikacji pomocniczej, a więc przy obciążeniu to EU10 działa trochę inaczej. Do regulacji napięcia wyjściowego SMPS, jak również do neutralizacji negatywnego wpływu czynników destabilizujących wykorzystywane jest wejście wzmacniacza sygnału błędu – wyjście 2, do którego podłączone jest dodatkowe uzwojenie pomocnicze transformatora, tworząc w ten sposób zewnętrzna pętla sprzężenia zwrotnego, zwana główną pętlą sterowania. Wzmacniacz monitoruje zakłócający wpływ czynników destabilizujących i koryguje parametry impulsów przełączających tak, aby napięcie na wyjściu uzwojenia komunikacyjnego oraz na obciążeniu było stałe. Właściwości częstotliwościowe i fazowe charakterystyki przenoszenia wzmacniacza sygnału błędu, które decydują o jego stabilności, są regulowane przez zewnętrzny obwód RC podłączony do pinu 1, który jest wewnętrznie podłączony do wyjścia tego wzmacniacza. Dzięki tej architekturze mikroukładu twórcy przewidzieli możliwość wykorzystania pinu 1 do zdalnego lub awaryjnego wyłączenia SMPS (przejście do TRYBU GOTOWOŚCI - tryb gotowości), zamykając go wspólnym przewodem za pomocą zewnętrznego tranzystora. Jeżeli do tego wyjścia podłączony jest czujnik optoelektroniczny, a do wyjścia podłączony jest elektrycznie, to uzyskuje się drugą pętlę regulacji napięcia wyjściowego, co poprawia właściwości stabilizujące SMPS, a dodatkowo umożliwia realizację „miękkiego” startu SMPS. Stabilizacja napięcia wyjściowego SMPS odbywa się w następujący sposób. Wyjście wzmacniacza sygnału błędu wewnątrz mikroukładu jest połączone przez obwody dopasowujące z wejściem odwracającym komparatora sterowania prądem. Czujnik prądu jest podłączony do nieodwracającego wejścia komparatora. W komparatorze prądu od momentu rozpoczęcia każdego impulsu przełączającego następuje porównanie tych dwóch sygnałów. Jeśli sygnały się pokrywają, każdy impuls przełączający zostanie zatrzymany w momencie, gdy prąd w uzwojeniu zasobnika osiągnie wymaganą wartość szczytową. W trybie normalnym nastąpi to znacznie wcześniej, niż prąd szczytowy osiągnie wartość graniczną prądu drenu tranzystora przełączającego. Z kolei prąd szczytowy określa moc roboczą transformatora. Energię zmagazynowaną w uzwojeniu akumulacyjnym transformatora o indukcyjności L określa się równaniem W=LIP2/2 i jeżeli gromadzenie energii zostanie przerwane w momencie, gdy liniowo narastający prąd w uzwojeniu osiągnie wymaganą wartość szczytową IP , wtórne obwody mocy otrzymają niezbędną porcję energii. Ponadto, jeśli przy stałym napięciu sieci zasilającej U0 porównamy dwie wersje przekształtnika różniące się np. dwukrotnie częstotliwością przetwarzania, to indukcyjność uzwojenia zasobnika powinna różnić się również dwa. Jest to konieczne, aby zmienić szybkość narastania prądu piłokształtnego, określoną przez stosunek U0 /L. Dlatego np. jeśli prąd w uzwojeniu przy częstotliwości przetwarzania 100 kHz w momencie impulsu przełączającego osiąga wartość szczytową po 2 μs, to przy częstotliwości 50 kHz, w wyniku podwojenia indukcyjności przy to samo napięcie U0, po 4 μs. Potęga dla obu opcji pozostaje taka sama, gdyż w charakteryzującym ją wyrażeniu P=W/T (T=1/f to okres częstotliwości konwersji) zarówno licznik, jak i mianownik zmienią się proporcjonalnie. Ale wymiary obwodu magnetycznego transformatora dla tych opcji będą się znacznie różnić: im wyższa częstotliwość, tym mniejszy wymagany obwód magnetyczny dla tej samej mocy. Podobnie, przy stałej indukcyjności L i zmiennym napięciu U0, przedział czasu tON będzie się zmieniał. podczas którego energia gromadzi się w uzwojeniu pierwotnym transformatora, ponieważ jest odwrotnie proporcjonalna do stosunku U0 /L. Zatem zmagazynowana energia w każdym impulsie pozostaje stała i nie zależy od czynników destabilizujących. Radioamatorzy, którzy chcą bardziej szczegółowo zapoznać się ze schematem blokowym, opisem funkcjonalnym i cechami układu EU10, mogą skorzystać z podręcznika [4]. ZASILANIE NA CHIPIE KR1033EU10 Schemat proponowanej najprostszej wersji SMPS. którego podstawą jest kontroler PWM KR1033EU10 (UC3842, KA3842), pokazany na ryc. 2.
Główne parametry zasilaczy impulsowych
Źródło napięcia sieciowego oraz filtr sieciowy niskiej i wysokiej częstotliwości wykonane są podobnie do pierwowzoru [2] i nie mają żadnych specjalnych cech, poza tym, że elementem ograniczającym prąd rozruchowy przy włączonym SMPS jest termistor RK1 z ujemnym TCS. Po włączeniu jego rezystancja jest maksymalna, a następnie w miarę nagrzewania się pod wpływem prądu pobieranego przez urządzenie maleje. Pomaga to chronić sieciowy mostek diodowy VD1 przed uszkodzeniem w trybie rozruchu. To prawda, że \uXNUMXb\uXNUMXbprzy szybkim ponownym uruchomieniu skuteczność takiej ochrony jest niska. Dzielnik napięcia R1 - R3 w obwodzie wzmacniacza sygnału błędu zapewnia regulację i stabilizację napięcia wyjściowego SMPS za pomocą pierwotnej pętli sterującej. Rezystor R6 zapewnia zasilanie mikroukładu w trybie rozruchu, gdy pobierany przez niego prąd nie przekracza 1 mA. Po włączeniu SMPS wyprostowane napięcie sieciowe przez rezystor ograniczający R6 jest doprowadzane do kondensatora filtrującego C11 w obwodzie zasilania mikroukładu. Gdy napięcie na kondensatorze osiągnie poziom progowy przejścia mikroukładu do stanu „włączenia” (typowa wartość - 16 V), komparator zostaje wyzwolony i zasilanie jest dostarczane do wszystkich elementów kontrolera PWM, po czym wewnętrzny źródło napięcia odniesienia jest włączone, następnie generator impulsów przełączających i wzmacniacz wyjściowy. SMPS przełącza się z trybu rozruchu w tryb pracy, dostarczając zasilanie do mikroukładu z uzwojenia pomocniczego połączenia transformatora przez diodę VD5. Prąd pobierany przez mikroukład wzrasta do 11 ... 17 mA. Jeśli napięcie sieciowe spadnie, napięcie wyjściowe SMPS i napięcie zasilania mikroukładu będą stopniowo spadać. Tempo spadku napięcia wyjściowego jest setki razy mniejsze niż napięcie wejściowe dzięki stabilizacji, jednak nadejdzie moment, gdy napięcie zasilania mikroukładu osiągnie poziom progowy do przejścia w stan „wyłączony” (typowa wartość to 10 V). W tym momencie komparator będzie działał, a zasilanie ze wszystkich elementów sterownika zostanie wyłączone. Różnica (6 V) pomiędzy poziomami progowymi załączania i wyłączania mikroukładu (histereza napięcia zasilania) jest konieczna, aby zapobiec przypadkowemu przełączaniu obwodów mocy w trybie rozruchu. Częstotliwość powtarzania impulsów przełączających (częstotliwość robocza konwersji na SMPS) jest określona przez parametry obwodu R5C8. Aby częstotliwość konwersji odpowiadała obliczonej wartości f = 30 kHz, może być konieczne wybranie wartości elementów nastawczych częstotliwości. Sposób określenia wymaganych wartości elementów nastawczych częstotliwości dla innej częstotliwości roboczej zostanie omówiony później. Szczególną uwagę przy projektowaniu opisywanego wariantu SMPS poświęcono zapewnieniu jego stabilności szumowej. W dużym stopniu o ogólnej stabilności wzmacniacza sygnału błędu sterownika, a co za tym idzie SMPS, decydują parametry układu kompensacyjnego R4C5. Temu samemu celowi służą następujące elementy: dioda VD2, która eliminuje skoki ujemne w stosunku do wspólnego przewodu zasilającego mikroukładu napięciowego podczas spadku impulsów przełączających; dioda Zenera VD3. ograniczenie „ostrych” skoków dodatniego napięcia na czołach impulsów przełączających; cewka indukcyjna L2 i rezystor ograniczający prąd R7, które zapobiegają samowzbudzeniu tranzystora przełączającego przy wysokiej częstotliwości. Kondensatory ceramiczne C9 i C10, podłączone bezpośrednio do pinów 7 i 8 mikroukładu, znacznie zwiększają stabilność wzmacniacza. Na czujniku prądu - rezystorze R11 - powstają impulsy napięcia piłokształtnego dla obwodów sterujących i zabezpieczających, których wartość szczytowa zależy od prądu drenu tranzystora przełączającego. Amplituda sygnału staje się równa 1 V przy prądzie drenu 3,7 A. Zapewnia to niezawodną ochronę tranzystora przed uszkodzeniem. Kondensator tlenkowy C13, połączony równolegle z rezystorem, znacznie tłumi szum przełączania, zapobiegając błędnemu działaniu komparatora kontroli prądu. Kondensator C7 służy temu samemu celowi. Kondensator C6 koryguje nachylenie napięcia piłokształtnego na pinach 3 i 4 mikroukładu, znacznie tłumiąc szumy o wysokiej częstotliwości, co zapewnia również wymaganą stabilność kontrolera. Nie mniej skuteczne są działania zmniejszające amplitudę zakłóceń generowanych w SMPS. Bardzo ważną rolę w tym odgrywa ekran elektrostatyczny zainstalowany na transformatorze impulsowym. Silne zakłócenia emituje również radiator, na którym zainstalowany jest tranzystor przełączający, jeśli radiator nie jest podłączony do wspólnego przewodu, a tranzystor nie jest od niego odizolowany płytką mikową. Znaczne zakłócenia generują pulsacyjne prądy płynące w przewodach podłączonych do drenu tranzystora przełączającego i do uzwojenia wyjściowego. W celu ich osłabienia w opisywanym zasilaczu impulsowym tranzystor łączy się z transformatorem krótkim kawałkiem kabla koncentrycznego, a drukowany przewód łączący diodę prostowniczą z uzwojeniem wyjściowym dobiera się tak, aby miał jak najmniejszą długość i duży przekrój. Jest rzeczą oczywistą, że znaczny udział w powstawaniu zakłóceń mają procesy przełączania zachodzące w momencie włączania i wyłączania tranzystora. Obecność dren-źródła pojemności międzyelektrodowej w tranzystorze polowym oraz rozłożona pojemność i indukcyjność rozproszenia w uzwojeniach transformatora prowadzi w momencie wyłączenia tranzystora do pojawienia się „ostrego” skok znacznego napięcia na jego drenie, a następnie wykładniczo tłumiony sygnał wysokiej częstotliwości. Częstotliwość wypełnienia tego sygnału, jeśli nie zostaną podjęte żadne specjalne środki, jest określona przez indukcyjność rozproszenia transformatora i pojemność międzyelektrodową tranzystora. Obwód tłumiący VD4R10C12, połączony równolegle z uzwojeniem magazynującym transformatora, tłumi swobodne oscylacje w tym sygnale i „wiąże” skok napięcia z zasilaniem sieciowym. Zwykle w przetwornicach typu flyback dodatkowy kondensator z rezystorem połączonym szeregowo-równolegle lub bez niego i diodą jest podłączony względem wspólnego przewodu (źródła) do drenu tranzystora przełączającego. Elementy te nie tylko skutecznie tłumią procesy przełączania, ale także pomagają zmniejszyć szybkość narastania napięcia na drenie tranzystora w momencie jego wyłączenia, zapobiegając w ten sposób niebezpiecznemu rozproszeniu mocy chwilowej na tranzystorze i przekazując kombinację maksymalnej mocy roboczej prądu i maksymalnego napięcia roboczego do obszaru bezpiecznych trybów pracy. W opisanym SMPS funkcję tę z powodzeniem realizuje cewka indukcyjna L3. Wyprostowane napięcie wyjściowe jest podawane do obciążenia przez filtr w kształcie litery U, dzięki czemu tętnienia napięcia wyjściowego są redukowane do wymaganego poziomu. Kondensator C17 łączy obwody wyjściowe i wejściowe zasilacza impulsowego z wysoką częstotliwością, skutecznie tłumiąc generowane zakłócenia oraz znacznie poprawiając kompatybilność elektromagnetyczną zasilacza impulsowego z urządzeniami podłączonymi do obwodów zasilających. Rysunek płytki drukowanej SMPS pokazano na ryc. 3. Wykonany jest z jednostronnie foliowanego włókna szklanego o grubości 1,5 mm i zasadniczo powtarza konstrukcję pierwowzoru [2]. Wyjątkiem są duże powierzchnie pozostawione na płytce z ciągłą metalizacją, które przyczyniają się do zwiększenia odporności urządzenia na zakłócenia.
W urządzeniu zastosowano części i elementy bez wad. Kondensator C1 - K73-17 na napięcie znamionowe 630 V, C2, C3 - K15-5, C12 i C17 - K78-2 lub K15-5 na napięcie znamionowe co najmniej 1000 V. Kondensator tlenkowy C4 - K50-32 . Dozwolone jest zastąpienie go krajowym K50-35B lub importowanym analogiem. W przypadku kondensatorów C9 i STO - KM-5 - wnioski są skracane do optymalnego minimum i lutowane bezpośrednio do wniosków 5,7 i 8 mikroukładu od strony drukowanych przewodów. Kondensator tlenkowy C13 - K53-14 lub inny kondensator tantalowy C11 - K50-35. Kondensatory tlenkowe C14 - C16 - importowane. Możesz użyć domowych, ale mają nieco większe rozmiary. Wszystkie inne kondensatory - dowolne ceramiczne na napięcie znamionowe co najmniej 50 V. Importowany termistor SCK105, gdzie pierwsze trzy znaki alfabetu oznaczają serię, czwarty i piąty znak numeryczny wskazują rezystancję nominalną w omach w temperaturze 25°C, a ostatnia cyfra oznacza maksymalny prąd roboczy w amperach, jest dopuszczalny do zastąpienia rodzimych o podobnych parametrach. Wszystkie rezystory to OMLT, z wyjątkiem importowanego rezystora R11, który w przybliżeniu odpowiada rozmiarem domowemu OMLT-1. Rezystor trymera R2 - SPZ-38b. Mostek prostowniczy KTs405A (VD1) wymienimy na osobne diody o dopuszczalnym napięciu wstecznym co najmniej 400 V i prądzie co najmniej 1 A. Dioda D310 (VD2) o dopuszczalnym prądzie przewodzenia 0,5 A i napięciu wstecznym 20 V można zastąpić nowoczesną z barierą Schottky'ego, przy której spadek napięcia stałego przy maksymalnym prądzie nie przekracza 0,5 V. Diodę Zenera (VD3) można zastąpić dowolną inną diodą małej mocy o napięciu stabilizującym 16 ... 18 V. Dioda impulsowa na miejscu VD4 (KD257D) musi być zaprojektowana na częstotliwość roboczą co najmniej 50 kHz , maksymalne napięcie wsteczne wynosi 1000 V, a maksymalny prąd 3 A. Wymienimy KD220B ( VD5) z diodą KD220A lub inną o podobnych parametrach. Dioda prostownicza KD213B (VD6) o częstotliwości roboczej do 100 kHz może wytrzymać napięcie wsteczne 200 V i maksymalny prąd 10 A. Równoległe połączenie takich diod, zaprojektowanych dla niższego prądu, bez rezystorów wyrównujących prąd dopuszczalny. Możliwe jest również zastosowanie nowoczesnych diod. Tranzystor KP707V2 zastąpimy importowanymi analogami o maksymalnym napięciu dren-źródło co najmniej 700 V i dopuszczalnym prądzie drenu co najmniej 4 A. Zainstaluj go na radiatorze o efektywnej powierzchni chłodzenia 100 ... 200 cm2 przez płytkę mikową pokrytą z obu stron pastą przewodzącą ciepło KPT-8. Wyjście drenu tranzystora od strony drukowanych przewodów płytki jest połączone z transformatorem krótkim kawałkiem kabla koncentrycznego o średnicy zewnętrznej około 5 mm, po przepuszczeniu rdzenia środkowego przez rurkę ferrytową. na ryc. 3 warunkowo pokazuje punkty początkowe i końcowe do podłączenia cewki indukcyjnej L3, ale obraz segmentu kabla nie jest pokazany. Aby wyeliminować dodatkowe zakłócenia, oplot kabla należy podłączyć do wspólnego przewodu w ściśle określonych miejscach: z jednej strony w bezpośrednim sąsiedztwie miejsca połączenia diody VD4 i zacisku 3 transformatora, z drugiej strony na wspólny punkt zerowy R11C13. Rurka ferrytowa jest przyklejona przez uszczelkę izolującą do płytki od strony drukowanych przewodów pod elementami R11, C13. Dopuszczalna jest wymiana dławika przemysłowego filtra sieciowego L1 na domowy. Jest nawinięty na dwa przewody MGTF 0,35 na radiomagnetonie z pierścieniem ferrytowym 1500NM-2000NM o średnicy zewnętrznej około 20 mm do wypełnienia. Cewki indukcyjne L2 i L3 to kawałki rurek o długości odpowiednio 5 ... 7 i 10 ... 12 mm, wykonane z ferrytu wysokiej częstotliwości stosowanego w dławikach DM-1,0 itp. Aby uzyskać wartości indukcyjności wskazane na schemacie , dla dławika L2 jeden zwój drutu PEVT 0,41, a dla L3 - dwa zwoje. W wersji autorskiej zastosowano podobne importowane produkty, przy czym na każdą przepustnicę potrzebny był jeden obrót (przejście). Dławik L4 jest nawinięty na odcinek pręta o średnicy 10 i długości 35 ... 40 mm z ferrytu 400NN. Jego uzwojenie zawiera 30 zwojów drutu PEV-2 1,5. Obwód magnetyczny transformatora T1 składa się z dwóch połówek ferrytu Sh12x20x21 M3000NMS2, stosowanego w zasilaczach telewizyjnych do telewizorów 3 (4) USCT itp., Z niemagnetyczną szczeliną na środkowym pręcie 2,4 mm. Uzwojenia nawinięte są na standardowej ramie z przewodami kontaktowymi, których numeracja odpowiada pokazanej na schemacie. Wykonuje się je w następujący sposób. Najpierw nawijana jest pierwsza sekcja uzwojenia pierwotnego - 26 zwojów PEVT 0,41 na dwa druty. Izolowany jest dwiema warstwami lakierowanej tkaniny o grubości 0,05 mm. Uzwojenie wyjściowe składające się z 25 zwojów drutu PEV-2 1,5 jest nawinięte na izolację. W takim przypadku wnioski 10, 12 i 14 obecne na ramie są usuwane, a drut uzwojenia jest używany jako wnioski, przepuszczając go przez szczelinę między odpowiednio wnioskami 10 i 12, 12 i 14. Na schemacie numery pinów są umownie oznaczone jako 10a i 12a. Następnie układane są dwie warstwy izolacji i nawijana jest na nią druga sekcja uzwojenia pierwotnego, zawierająca 44 zwoje. Ostatnie uzwojenie to pomocnicze uzwojenie komunikacyjne 12 zwojów drutu PEVT o średnicy 0,15 ... 0,21 mm, równomiernie rozłożone na całej szerokości ramy i przykryte kolejną warstwą izolacji od góry. Po sklejeniu płytek ferrytowych transformatora uzwojenia wraz z obwodem magnetycznym pokrywane są ekranem elektrostatycznym z pojedynczej warstwy folii miedzianej. Liczba zwojów w uzwojeniach jest określona przez obwód magnetyczny i szczelinę niemagnetyczną, dlatego dla innego obwodu magnetycznego należy je ponownie obliczyć. SMPS jest podłączony do sieci kablem dwużyłowym, którego przerwa zawiera przełącznik PKn41 lub przełącznik dźwigienkowy TV2-1 oraz bezpiecznik 2 A. Jeżeli podczas produkcji transformatora fazowanie uzwojeń nie zostanie naruszone i zastosowane zostaną części nadające się do użytku, regulacja urządzenia ogranicza się do ustawienia napięcia wyjściowego za pomocą rezystora strojenia R2. Zastosowanie elementów układu zadawania częstotliwości R5C8 bez ich wstępnego doboru może spowodować nieznaczne odchylenie częstotliwości roboczej od wartości obliczonej. Typ i parametry większości elementów zastosowanych w SMPS zostały określone zgodnie z wynikami komputerowego wspomagania projektowania, o czym będzie mowa w dalszej części. CECHY KONSTRUKCYJNE ODWROTNYCH SMPS Możliwe, że opisany IIP całkowicie usatysfakcjonuje jednego z radioamatorów i zdecyduje się go powtórzyć, nie zmieniając niczego. Ale prawdopodobieństwo takiego zdarzenia jest bardzo, bardzo małe: w zależności od zakresu zainteresowań radioamatorów, a są one zawsze wielopłaszczyznowe, możesz potrzebować źródła, którego parametry będą się znacznie różnić od podanych. Dlatego w większości praktycznych przypadków konieczna będzie modyfikacja opisywanego urządzenia i wprowadzenie w nim pewnych zmian. Grupa firm STMicroelectronics, produkująca komponenty radioelektroniczne, opracowała i sprzedaje na rynku światowym, w tym na rynku rosyjskim, linię mikroukładów pod nazwą handlową VIPer. Nie wchodząc w specyfikę zastosowanego skrótu, zauważamy jedynie, że produkt ten jest integralną wersją głównego fragmentu SMPS, w tym tranzystora przełączającego i kontrolera PWM. Zgodnie z koncepcją twórców, takie mikroukłady powinny znacznie ułatwić pracę projektantom i operatorom SMPS. Pewny (2...4 krotny - w zależności od wybranego mikroukładu) wzrost kosztu bazy elementowej SMPS przełączanego VIPerem, w porównaniu z jego wersją dyskretną, jest w pełni kompensowany przez możliwości zautomatyzowanego projektowania, a także szybkie odzyskiwanie poprzez prostą wymianę mikroukładu w przypadku awarii. . W celu zautomatyzowanego projektowania SMPS w oparciu o mikroukłady VIPer ta sama firma opracowała swobodnie dystrybuowany pakiet oprogramowania VIPer Design Software. Najnowszą wersję programu (v2.12) o pojemności 4 MB można pobrać ze strony dewelopera . Ten pakiet oprogramowania, zwany dalej DS (Design Software), może być z powodzeniem wykorzystany do zaprojektowania opisywanej opcji SMPS w oparciu o kontroler UC3842 PWM. Przyjazny dla użytkownika interfejs pozwala wykonać tak złożone zadanie w ciągu kilku minut. Przed użyciem DS wyjaśnijmy niektóre cechy projektowe związane z wyborem elementów i ustawieniem roboczej częstotliwości konwersji w SMPS. Należy pamiętać, że w transformatorach impulsowych typu flyback obwód magnetyczny jest zawsze wykonany z niemagnetyczną szczeliną na środkowym pręcie (rdzeniu). Mowa tu zarówno o transformatorach z płytami w kształcie litery Ř, jak i nowoczesnych rdzeniach magnetycznych typu KB (obcy odpowiednik RM) [5, 6]. Zwróćmy również uwagę na preferencje stosowania ferrytu do transformatorów impulsowych, na przykład marki M3000NMS-2, w nazwie której występuje symbol C. Jest to oznaka zdolności drutu magnetycznego wykonanego z tego materiału do pracy w silnych polach magnetycznych, co wynika w odróżnieniu od innych z ujemnego temperaturowego współczynnika strat właściwych. Pomimo spadku sprawności i pogorszenia kompatybilności elektromagnetycznej transformatora z innymi elementami nie sposób odmówić sobie szczeliny niemagnetycznej. Po pierwsze, w silnych polach magnetycznych przerwa zapobiega nasycaniu się obwodu magnetycznego, a po drugie, przy prawidłowym doborze trybu pracy tranzystora przełączającego, obecność przerwy zapobiega nadmiernemu wzrostowi wartości amplitudy impulsów prądu w jego obwód drenażowy. Trzeba więc liczyć się ze stratami i liczyć się z faktem, że natężenie promieniowania szumu związanego z podstawowymi i wyższymi harmonicznymi częstotliwości pracy przetwornicy stosunkowo szybko wzrasta po 100 kHz. Oczywiście istnieją materiały magnetyczne, w których domeny są oddzielone od siebie substancją niemagnetyczną (np. itp.), w którym szczelina wydaje się być rozłożona na całą objętość roboczą obwodu magnetycznego, a zatem w zasadzie możliwe jest stosowanie stałych obwodów magnetycznych bez szczeliny. Drugim źródłem strat w SMPS jest rosnąca rezystancja przewodów uzwojenia na skutek zmniejszania się głębokości wnikania pola przy wyższych częstotliwościach. Dlatego, aby zmniejszyć straty spowodowane tym zjawiskiem, pożądane jest nawijanie uzwojenia z kilku równoległych przewodów, których pole przekroju poprzecznego jest równoważne pierwotnemu, ale powierzchnia boczna wzdłuż obwodu przekrój przewodu jest kilkakrotnie większy. Dokładniej, wzrost powierzchni bocznej w tym przypadku jest proporcjonalny do pierwiastka kwadratowego z liczby równoległych przewodów. Trzecie źródło strat związane jest z odwróceniem namagnesowania obwodu magnetycznego. I wreszcie ostatnie, czwarte źródło strat wynika z konieczności stosowania różnych obwodów rezystancyjno-kondensatorowych tłumiących przejściowe procesy przełączania oraz ograniczonej prędkości elementów radiowych zastosowanych w SMPS - kondensatory tlenkowe, tranzystor polowy , diody prostownicze. Niesinusoidalne (impulsowe) napięcie na tych elementach i duża amplituda prądu (do kilku amperów) powodują w nich znaczny ciężar właściwy strat. Wszystkie te straty muszą być brane pod uwagę przy projektowaniu SMPS z wykorzystaniem DS. Ponieważ straty w transformatorze prowadzą do nagrzewania się jego uzwojeń i obwodu magnetycznego, do ich oceny stosuje się jedno z kryteriów: albo dopuszczalny wzrost temperatury transformatora bez jego wymuszonego chłodzenia, który zwykle wybiera się w granicach 30 ... 50 ° C , lub przyjmuje się, że ciężar właściwy strat wynosi 1...5% mocy transformatora. Ogólna wydajność SMPS jest oceniana na podstawie wydajności. W najlepszym przypadku jego wartość może sięgać 92...95%, w najgorszym - 60...65%. DOBÓR TRANZYSTORA PRZEŁĄCZNIKA I DIOD PROSTOWNIKOWYCH Tranzystor przełączający bez żadnych obliczeń można wybrać z wielokrotnym marginesem. I można rozwiązać ten problem bardziej racjonalnie. Jak określić parametry, którym musi odpowiadać tranzystor przełączający, w zależności od charakterystyki technicznej zaprojektowanego SMPS? Niestety pakiet DS nie odpowiada wprost na postawione pytanie. Dlatego najpierw rozważymy kształt napięcia pulsacyjnego na drenie tranzystora Uc (ryc. 4).
Zgodnie z danymi początkowymi, przy napięciu znamionowym 220 V na wyjściu prostownika sieciowego, bez uwzględnienia spadku napięcia na diodach prostowniczych i termistorze, otrzymujemy [7] U0 = 220√2 \u310d 80 V. Ponadto na drenie tranzystora występuje dodatkowe napięcie sieci wyprostowanej Uadm. W literaturze zagranicznej iw DS nazywa się to UR (odbite - odbite, wywołane). Jak pokazują wyniki próbnego projektowania kilku wariantów transformatorów impulsowych, jego wartość zawsze okazuje się bardzo zbliżona do proponowanej w DS wartości domyślnej XNUMX V. Pokażmy, jak określić rzeczywistą wartość dodatkowego napięcia. Napięcie na cewce indukcyjnej jest wprost proporcjonalne do szybkości zmian prądu w niej: U = LΔI/Δt lub U Δt = L ΔI. Ponieważ zmiany prądu przy włączonym i wyłączonym tranzystorze dla procesu ustalonego są takie same, obszary prostokątów oznaczone S+ i S- na ryc. 4. Obliczając ich pola otrzymujemy równanie Uo·D·T = Uadd(1-D)T lub po przekształceniach Uadd = Uo·D /(1-D). Z drugiej strony, zgodnie z geometryczną interpretacją procesu przenoszenia energii, napięcie wyjściowe na uzwojeniu wtórnym jest przekształconym napięciem dodatkowym na uzwojeniu pierwotnym: Uadd \uXNUMXd k Uout, gdzie k \uXNUMXd wl / wout - transformacja stosunek (wl, wout - odpowiednio liczba zwojów uzwojenia pierwotnego i wyjściowego). Ściśle mówiąc, założenie, że każda porcja energii pobrana z sieci w pierwszym cyklu jest przekazywana bez śladu do obciążenia w drugim cyklu, jak pokazano na rys. 4 linią ciągłą, a jednocześnie transmisja kończy się dokładnie w momencie włączenia tranzystora, jest w pewnym stopniu warunkowa. W rzeczywistości SMPS mogą pracować w dwóch trybach: trybie ciągłego strumienia magnetycznego i trybie nieciągłego strumienia magnetycznego. W praktyce oznacza to, że jeśli do czasu włączenia tranzystora przełączającego prąd w uzwojeniach wynosi zero, wówczas tryb ten odpowiada trybowi przerywanego przepływu. W przeciwnym razie ma miejsce tryb ciągłego przepływu. na ryc. 5 przedstawia wykresy napięć i prądów w elementach SMPS: Uc - napięcie na drenie tranzystora; lc - prąd drenu tranzystora przełączającego; lw out - prąd w uzwojeniu wtórnym; UH - napięcie obciążenia.
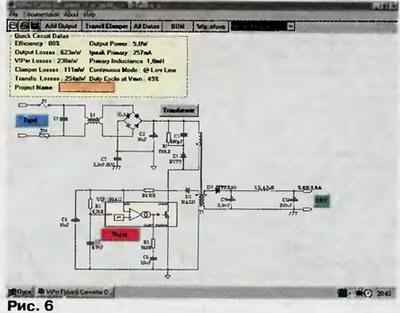
Tryb prądu ciągłego odpowiada rys. 5, A. Jego główną cechą jest to, że tranzystor włącza się przy określonym prądzie drenu. Zaletą tego trybu jest najmniejszy prąd szczytowy w elementach SMPS w porównaniu do innych trybów oraz najmniejsze tętnienia napięcia wyjściowego. Jeśli poprzez zmniejszenie napięcia sieciowego do minimum możliwe jest zwiększenie cyklu pracy impulsu o więcej niż 50%, DS ostrzega użytkownika, aby dokonał korekty obliczeń. Wynika to ze specyfiki namagnesowania obwodu magnetycznego w trybie impulsowym w jednym cyklu i możliwości zwiększenia amplitudy prądu drenu tranzystora powyżej dopuszczalnej granicy. Tryb prądu przerywanego pokazano na ryc. 5, ok. Po zakończeniu procesu przekazywania energii dioda zamyka się. W uzwojeniach powstają tłumione oscylacje swobodne przy spadku napięcia impulsowego. Tryb ten charakteryzuje się największą amplitudą prądu w elementach SMPS oraz maksymalnym tętnieniem napięcia wyjściowego. Optymalny jest tryb przejściowy między dwoma wymienionymi, pokazany na rys. 5 B. Program DS pozwala na sterowanie amplitudą, kształtem prądu i napięcia na tranzystorze, a także określanie trybu pracy zaprojektowanego zasilacza impulsowego oraz wartości współczynnika wypełnienia impulsu przy dowolnym możliwym napięciu sieciowym. Znaczący dodatek do napięcia działającego na dren tranzystora stanowi indukcyjność upływu (w DS jest to indukcyjność upływu). Jest to bezpośrednio związane z polami błądzącymi w transformatorze. Podczas działania impulsów przełączających, gdy tranzystor jest otwarty, energia gromadzi się nie tylko w uzwojeniu magazynującym, ale także w indukcyjności rozproszenia. Gdy tranzystor jest wyłączony, energia ta prowadzi do dodatkowego skoku napięcia na jego drenie, co pokazano na ryc. 4 kropkowane linie. Aby to ograniczyć stosuje się obwody tłumiące. W programie DS możesz wybrać obwód rezystancyjno-kondensatorowy (RC Clamp) lub ograniczającą diodę Zenera (Transil Clamp). Obliczenie indukcyjności rozproszenia i związanego z nią skoku napięcia jest zadaniem bardzo trudnym, ponieważ konieczne jest uwzględnienie indukcyjności i pojemności dynamicznej międzyzwojowej uzwojeń, szczeliny niemagnetycznej w obwodzie magnetycznym transformatora, przekroju uzwojenia, parametry projektowe ich wykonania i wiele innych czynników. Program DS wykorzystuje pewną średnią wartość indukcyjności rozproszenia, którą w razie potrzeby użytkownik może wymusić zmianę. Poziom ograniczenia skoków napięcia w każdym konkretnym przypadku projektu SMPS można kontrolować w oknie Waveform (oscylogram) i brać pod uwagę przy wyborze tranzystora zgodnie z maksymalnym dopuszczalnym napięciem dren-źródło. Wybór diody prostowniczej w DS nie jest trudny. Okno OUT dostarcza niezbędnych informacji o jego parametrach: prądzie do przodu i do tyłu, spadku do przodu i maksymalnym dopuszczalnym napięciu wstecznym. ZAUTOMATYZOWANE PROJEKTOWANIE ODWROTNYCH SMPS Więc włącz komputer i uruchom program DS. Na ekranie monitora przez kilka sekund pojawia się ekran powitalny, a następnie otwiera się okno (rys. 6). Domyślnie program ładuje projekt „przygotowawczy” pod nazwą „Default.vpa”.
Przesuń kursor myszy na niebieski przycisk ekranowy Wejście (wejście), a na ekranie monitora pojawi się podpowiedź: Edycja parametrów linii AC (edycja parametrów linii AC). Wciskamy przycisk. Na ekranie monitora pojawia się okno Input Parameters pokazane na rys. 7.
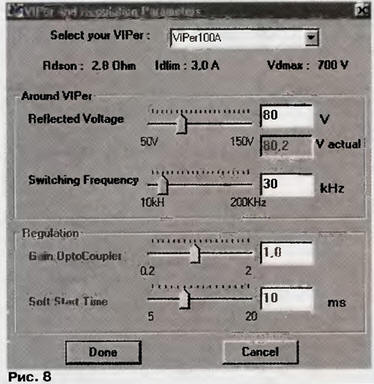
W sekcji Częstotliwość linii ustaw 50 Hz, w sekcji Zakres wejściowy AC (przedział napięcia wejściowego AC) za pomocą suwaka lub po umieszczeniu kursora w odpowiednim oknie - wpisując z klawiatury - ustaw Minimalne napięcie (minimalne napięcie) oraz Napięcie maksymalne (napięcie maksymalne), pierwsze - z dokładnością do 5 V, drugie -10 V. Z klawiatury można ustawić dowolne napięcie z dokładnością do 1 V. Dla większości urządzeń dopuszczalna zmiana napięcia sieciowego napięcie jest uważane za -10 ... + 5% wartości nominalnej lub po zaokrągleniu w kierunku zwiększenia interwału - 195 ... 240 V. Możesz ustawić interwał i nieco szerszy, ale w każdym razie ty nie należy pozostawiać go ustawionego domyślnie, ponieważ im jest większy, tym bardziej rygorystyczne są wymagania dotyczące używanej bazy elementów. Następnie w tym samym oknie przechodzimy do sekcji Input Ripple (amplituda tętnienia napięcia wejściowego) i ustawiamy jej wymaganą wartość. Od tego parametru zależeć będzie pojemność kondensatora filtrującego prostownika sieciowego i amplituda tętnień napięcia wyjściowego, które z kolei zależą również od prądu obciążenia i pojemności kondensatora filtra wyjściowego. Dopuszczalna wartość tętnienia wynosi 10 ... 30 V. Ustaw 30 V i naciśnij przycisk Gotowe - gotowe (w razie potrzeby możesz anulować wprowadzone zmiany przyciskiem Anuluj). Okno parametrów wejściowych zamknie się automatycznie, a system dokona pewnych korekt: na przykład zmieni się pojemność kondensatora filtra prostownika sieciowego. W kolejnym etapie projektowania przystępujemy do ustawienia roboczej częstotliwości konwersji oraz wstępnego wyboru tranzystora przełączającego, dla którego wciskamy przycisk VIPer. W wyświetlonym oknie VIPer i Parametry regulacji (VIPer i parametry regulacji) (Rys. 8) w oknie Wybierz swojego VIPera (wybierz VIPer) wywołujemy rozwijaną listę produktów i wybieramy VIPer 100A. Teraz, tuż pod jego nazwą, zostaną wyświetlone główne parametry: Rdson: 2,8 Ohm (rezystancja sekcji dren-źródło w stanie włączonym); Idlim: 3,0 A (ograniczenie prądu drenu); Vdmax: 700 V (maksymalne napięcie drenu). W sekcji Around VIPer („około” VIPer) wartość napięcia odbitego (napięcia odbitego) pozostawiana jest przez system, Częstotliwość przełączania (częstotliwość przełączania) jest ustawiona na 30 kHz. Pozwoli to zmniejszyć straty i uniknąć rzadkich części, chociaż w celu zminimalizowania rozmiaru transformatora lepiej jest zastosować wyższą częstotliwość - do 100 kHz. Sekcja Regulamin pozostaje nieaktywna i nie można jej edytować. Można to zrobić dopiero po wprowadzeniu wtórnej pętli sterującej. Kliknij przycisk Gotowe (gotowe). Okno zamknie się automatycznie.
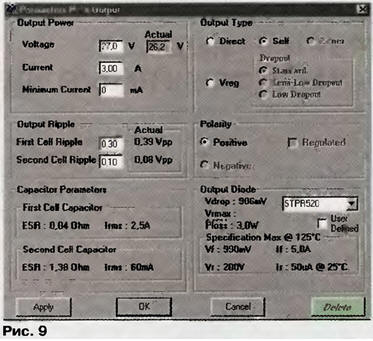
Następnie przejdź do zielonego przycisku Wyjdź (wyjdź). W otwartym oknie Parametry wyjścia głównego (parametry głównego źródła napięcia wyjściowego) (rys. 9) przystępujemy do edycji sekcji Moc wyjściowa: w oknie Napięcie ustawiamy 27 V; w oknie Prąd (prąd) wpisujemy 3 A; w oknie Prąd minimalny (prąd minimalny) pozostawiamy ustawione przez program 0 mA, co implikuje możliwość pracy w trybie jałowym.
Następnie edytuj sekcję Typ wyjścia (filtr wyjściowy). Możesz pozostawić domyślny filtr LC w kształcie litery U. Jeśli wybierzesz Direct (filtr - kondensator połączony równolegle z obciążeniem), może być wymagany bardzo duży kondensator. Jeśli wybrano Vreg (regulator napięcia), na wyjściu zostanie zainstalowany dodatkowy zintegrowany liniowy regulator napięcia. W takim przypadku należy określić wartość Dropout (spadek napięcia na stabilizatorze). Do wyboru jest Standard (standard), Low Dropout (niski) i Semi-Low Dropout (średni). Pozostaw filtr wyjściowy jako Self. Przejdźmy do edycji wartości tętnienia napięcia wyjściowego - sekcja Output Ripple: w oknie First Cell Ripple (tętnienie w pierwszym stopniu) ustaw 0,3 V, Second Cell Ripple (tętnienie w drugim stopniu) - 0,1 V. Po wszystkich powyższych manipulacjach kliknij przycisk Zastosuj. Program natychmiast obliczy parametry elementów obwodu wyjściowego i przedstawi wyniki obliczeń dla diody prostowniczej: Vdrop: 906 mV - spadek napięcia w kierunku przewodzenia, Vrmax: 150 V - maksymalna część napięcia wstecznego w pikselach określonego elementu), Ploss: 3 W - straty na diodzie; Specyfikacja Max@125 °С - parametry diody STPR520 w określonej temperaturze: Vf: 990 mV - spadek napięcia przewodzenia, If: 5 A - dopuszczalny prąd przewodzenia, Vr: 200 V - ograniczenie napięcia wstecznego; Ir: 50 uA @ 25 °C to maksymalny prąd wsteczny w określonej temperaturze. Zgodnie z książką referencyjną wybieramy bliski krajowy analog KD213B. Należy zauważyć, że ze względu na kształt napięcia pulsującego, który bardzo różni się od meandrowego, dioda prostownicza, uczestnicząc w powstawaniu stosunkowo niskiego napięcia 27 V, doświadcza znacznie wyższego napięcia wstecznego - około 150 V - i weź to pod uwagę przy wyborze diod. Po zakończeniu tego etapu projektowania kliknij przycisk OK w otwartym oknie Parameters Main Output, po czym zostanie ono zamknięte. A ostatni etap projektowania związany jest z edycją parametrów transformatora impulsowego. Kliknij szary przycisk Transformer, po czym otworzy się okno Transformer Design (projekt transformatora), pokazane na ryc. 10.
Okno zawiera dwie główne sekcje: Parametry transformatora (parametry transformatora) oraz Perspektywę transformatora (wyjście transformatora), których zawartość odpowiada transformatorowi, którego standardowa wielkość jest wskazana w sekcji Rozmiar rdzenia (rozmiar rdzenia). Program używa najmniejszego możliwego rozmiaru rdzenia, zgodnie z domyślnym kryterium strat Wzrost temperatury w sekcji Kryteria wyboru rdzenia. Naprzeciw tego kryterium ustawione jest pole wyboru, w tej samej linii, w której wskazane są jego wartości: Docelowy 40°С (dopuszczalny) i Rzeczywisty 34,8°С (rzeczywisty). Jednocześnie wartości kryterium drugorzędnego Dissipated Power (moc rozproszona) odpowiadają Target 2%, Actual 2,2%. Ten ostatni, jako przekraczający ustaloną normę, jest wyświetlany w oknie na czerwonym tle. Jeżeli wybierzesz drugie kryterium jako główne (zresetujesz checkbox obok jego nazwy), a następnie klikniesz przycisk Zastosuj, parametry przekładnika natychmiast się zmienią W oknie Geometria sekcji Rozmiar rdzenia podane są wymiary każdej blachy w następującej kolejności: szerokość/wysokość/grubość E36/18/11 seria E (geometria dla serii E - obcy odpowiednik blach w kształcie litery W) . Prawie takie same wymiary mają krajowy odpowiednik W 10x10. Jeśli go użyjesz, możesz przejść do następnej sekcji. Jeśli taki obwód magnetyczny nie jest dostępny, ale jest Ш12x20x21 wykonany z ferrytu M3000NMS2, stosowanego w zasilaczach do telewizorów 3 (4) USCT i innych, konieczne jest ponowne obliczenie parametrów transformatora. Aby to zrobić, w sekcji Rozmiar rdzenia zaznacz pole w oknie Naprawiono i kliknij przycisk Edytuj, po czym pojawi się okno Rozmiar rdzenia (ryc. 11).
Kształt obwodu magnetycznego serii E pozostawiamy bez zmian (w razie potrzeby w tym samym oknie można wybrać inny obwód magnetyczny z proponowanej listy, na przykład serię RM10). Następnie w oknie Geometria wybieramy standardowy rozmiar zbliżony do istniejącego E42/21/20. Kliknij przycisk OK, po czym okno Core Size zamknie się. Teraz w sekcji Rozmiar rdzenia możesz odczytać parametry wybranego obwodu magnetycznego: Ae 236 mm2 (powierzchnia przekroju); Le 98 mm (średnia długość linii magnetycznej); Lm 85 mm (średnia długość cewki); szer. 200 mm2 (przekrój okna); Ve 23100 mm3 (objętość rdzenia magnetycznego). Uwaga: po powiększeniu zniknął czerwony baner odpowiadający pozagłównemu kryterium Moc rozproszona - wcześniej jego rzeczywista wartość 2,2% przekraczała wymaganą, ale teraz wróciła do normy i wynosi 1,4%. Przejdźmy do treści sekcji Materiał podstawowy. Domyślnie program oferuje: Typ N27, Dostawca SIEMENS (gatunek ferrytu N27 firmy SIEMENS). Porównując jego parametry z charakterystykami krajowych ferrytów M3000NMS2 podanych w podręczniku [8], zauważamy ich dobrą zgodność. W przypadku konieczności użycia innego ferrytu należy zaznaczyć pole wyboru w oknie User Defined (zdefiniowanym przez użytkownika) i kliknąć przycisk Edit, po czym pojawi się okno Transformer Core Material (materiał rdzenia transformatora), pokazane na rys. . 12.
Posiada możliwość wyboru producenta i marki ferrytu, którego parametry wyświetlane są w tym samym oknie. Należy zauważyć, że niezależnie od wybranego ferrytu wartość parametru indukcyjności pierwotnej (patrz rys. 10) pozostaje niezmieniona. Informacje na temat uzwojeń transformatora znajdują się w rozdziale Perspektywy transformatora (parametry wyjścia transformatora). Teraz można je przepisać (lub wydrukować na drukarce, jest taka możliwość) i przystąpić do praktycznej realizacji. Niektóre błędy obliczeniowe, jak każdy inny czynnik destabilizujący, zostaną wyrównane przez automatyczne jednostki sterujące kontrolera PWM, ale zmniejszy to margines stabilności SMPS dla innych zakłócających wpływów. Dlatego nadal lepiej nie spieszyć się i poprawiać wyniki komputerowego wspomagania projektowania, zbliżając je jak najbardziej do rzeczywistych. KOREKTA WYNIKÓW PROJEKTU Zwróćmy się ponownie do okna Transformer Design, pokazanego na ryc. dziesięć. W sekcji Wybór przewodów Przewody równoległe (wybór przewodów równoległych w uzwojeniu) pozostaw domyślne zaznaczenie ustawione przez program na pozycji Pojedynczy przewód (pojedynczy przewód), co będzie odpowiadać zastosowaniu pojedynczych przewodów w uzwojeniu. Jeśli wybierzesz pozycję //Przewody (przewody równoległe) iw odpowiednim oknie poprawisz 10 przewodów zainstalowanych przez system na inną oczekiwaną liczbę, w zależności od częstotliwości pracy, program przeliczy uzwojenia transformatora z nowymi wartościami początkowymi. Możliwe jest zastosowanie przewodów o tej samej średnicy dla wszystkich uzwojeń. Aby to zrobić, po prostu umieść „ptaszka” w polu Pojedyncza średnica i naciśnij przycisk Zastosuj. Ograniczymy się do stosowania pojedynczych przewodów o różnych średnicach. Teraz w sekcji Perspektywy transformatora można przeczytać informacje referencyjne dotyczące wszystkich uzwojeń: Wejście AWG20 75T 1W (pierwotne - przewód nr 20 zgodnie ze standardem AWG, 75 zwojów pojedynczego przewodu), Pomocnicze AWG42 13T 1W (pomocnicze - przewód nr 42 , 13 zwojów), Out AWG 13 26T 1W (wyjście - przewód nr 13, 26 zwojów). Aby sprawdzić średnicę drutu w milimetrach, przejdź do sekcji Szczegóły AWG i kliknij jeden z trzech kolorowych przycisków, których kolor odpowiada kolorowi uzwojeń. W nagłówku AWG Szczegóły pojawia się odpowiednia nazwa uzwojenia, a poniżej jego parametry geometryczne i elektryczne. Np. dla uzwojenia pomocniczego (Aux) Ø64 um Iso 76 um; Rdc=6,9R; Rac \u6,9d 64 R (średnica - 0,064 mikrony \u0,076d 6,9 mm, z izolacją - 6,9 mm; rezystancja prądu stałego - XNUMX oma; rezystancja prądu przemiennego - XNUMX oma). W rozdziale Wykorzystanie transformatora (wykorzystanie transformatora) podano główne normy, charakteryzujące niektóre rezerwy, które należy zapewnić przy projektowaniu transformatora. Należą do nich Window Factor Utilization (współczynnik wypełnienia sekcji okna), który domyślnie nie powinien przekraczać 80%, oraz Bsat Margin (maksymalny margines indukcji w obwodzie magnetycznym) względem indukcji w trybie nasycenia Bsat 380 mT - co najmniej 25%. Obliczono, że gęstość strumienia 116 mT wynosi tylko około 30% możliwego maksimum, tj. margines wynosi 70%, a wymóg marginesu jest spełniony. Tak niska indukcja magnetyczna wynika ze wskazanej tu niemagnetycznej szczeliny powietrznej równej 2,28 mm. Zgodnie z algorytmem projektowym program wyliczył, że indukcyjność indukcyjności pierwotnej w tym przypadku powinna wynosić 0,73 mH. Ale jeśli podejdziemy krytycznie do wyników projektowania, konieczne jest wcześniejsze uwzględnienie błędu w obliczeniach. Katalogi produktów ferrytowych wskazują, że ich parametry elektromagnetyczne mogą odbiegać od podanych wartości o ± 25%. Dlatego lepiej nie polegać na przypadku i nie przeciążać zespołu czynników destabilizujących dodatkowymi wpływami zakłócającymi, ale skorygować wyniki projektowania. Dotyczy to przede wszystkim indukcyjności uzwojenia pierwotnego transformatora. Ponieważ podczas opracowywania SMPS radioamator może mieć obwód magnetyczny z niemagnetyczną szczeliną, która różni się od obliczonej. Okoliczność ta wskazuje również na konieczność uwzględnienia rzeczywistej indukcyjności uzwojenia pierwotnego. Znane wzory matematyczne nie pozwalają na obliczenie indukcyjności uzwojenia pierwotnego z dużą dokładnością, ponieważ nie uwzględniają silnego wpływu szczeliny niemagnetycznej na efektywną przenikalność magnetyczną materiału obwodu magnetycznego. Dlatego najłatwiej jest nawinąć uzwojenie testowe z liczbą zwojów wsondy na dostępnym obwodzie magnetycznym. zmierzyć jego indukcyjność Lsonda, a następnie obliczyć liczbę zwojów w wymaganych dla danej indukcyjności L: w = wprobe√ Próbki L/L. Oczywiście indukcyjność uzwojenia zależy w bardzo niewielkim stopniu od średnicy przewodnika. Może się zdarzyć, że radioamator nie miał wymaganego przez system zakresu drutów nawojowych, ale jest komplet drutów o innej średnicy, który można wykorzystać do wykonania transformatora. Na przykład dla uzwojenia pierwotnego program zaleca użycie drutu o średnicy 0,812 mm. Co więcej, przy częstotliwości konwersji 30 kHz nie będzie można „zmusić” programu do przełączenia na przewody równoległe. Niemniej jednak w większości transformatorów impulsowych zasilaczy telewizyjnych uzwojenia są wykonane z kilku równoległych przewodników. Wykonajmy tę operację poza systemem komputerowego wspomagania projektowania. Z warunku równości powierzchni bocznej, zrównując obwód przewodów pojedynczych i równoległych, wyznaczamy ich średnicę: d2 = d1/2 -0,41 mm. Indukcyjność uzwojenia pierwotnego transformatora, zawierającego 26 zwojów dwóch przewodów PEV-2 0,41, nawiniętych na obwód magnetyczny wykonany z płyt transformatora Ш12x20x21 z niemagnetyczną szczeliną na środkowym pręcie 2,4 mm, wyniosła 103 μH. Aby uzyskać wymaganą indukcyjność 730 µH, uzwojenie powinno składać się z około 70 zwojów. Proporcjonalnie wyregulować pozostałe uzwojenia zalecane przez program: w2 = (70/75) 13 -12 obrotów; wvyx \u70d (75/26) 24 - XNUMX obroty. Rzeczywista indukcyjność uzwojenia pierwotnego transformatora wykonanego zgodnie z podanymi parametrami wynosi w przybliżeniu 770 μH, co jest zgodne z obliczeniami. Dla uzwojenia wyjściowego program zaleca użycie drutu o średnicy 1,8 mm, przy czym rezystancja uzwojenia dla prądu stałego wyniesie 25 mΩ, a dla prądu przemiennego 38 mΩ. Niestety autor nie dysponował wymaganym drutem, więc musiał zostać wymieniony na istniejący o innej średnicy - 1,5 mm. Nieunikniony wzrost rezystancji uzwojenia i odpowiadający mu spadek napięcia wyjściowego będą musiały zostać skompensowane wzrostem liczby zwojów 25. Znaczny margines obliczonego wzrostu temperatury transformatora (15,5 ° C w stosunku do dopuszczalnego 40°C) daje prawo do nadziei na zasadność takiej korekty. Kończąc obliczenia transformatora, wyznaczamy dodatkowe napięcie Udop = (70/25) 27 = 75,6 V, a biorąc pod uwagę wydajność - 81,6 V, co jest bardzo zbliżone do ustawionego przez program, a więc do Okno VIPer (patrz rys. 8) może nie zostać zwrócone. Zwracamy się do wyboru tranzystora przełączającego. Na pasku narzędzi DS klikamy na przycisk Waveform (oscylogram), po czym pojawia się okno pokazane na rys. 13, w którym do wyboru można jednocześnie obserwować do czterech różnych parametrów SMPS.
Pozostawiamy dwa okna oferowane przez system do przeglądania oscylogramów, w pierwszym oknie wyświetlimy zależność Idrain = f(Vin)@Pmax (zależność prądu drenu od napięcia wejściowego przy maksymalnym poborze mocy), a w druga - Vdren = f(Vin)@Pmax (zależność napięcia drenu od napięcia wejściowego przy maksymalnym poborze mocy). Zmieniając napięcie wejściowe za pomocą suwaka na pasku przewijania, możesz zbadać naturę transformacji tych parametrów. Z tych wykresów można wyciągnąć następujące wnioski: dla wszystkich dopuszczalnych zmian napięcia sieciowego i parametrów obciążenia zaprojektowany SMPS pracuje w trybie prądu przerywanego - dodatkowo wskazuje na to napis w prawym górnym rogu okienek z oscylogramami ; amplituda prądu drenu tranzystora przełączającego przy maksymalnym napięciu sieciowym wynosi 2,7 A; przy minimalnym napięciu amplituda prądu pozostaje taka sama, a cykl pracy impulsów przełączających wzrasta z 0,18 do 0,24; maksymalne napięcie na drenie tranzystora (przy maksymalnym napięciu sieciowym) osiąga 640 V. Uzyskane wyniki pozwalają stwierdzić, że dla projektowanego SMPS dopuszczalne jest zastosowanie tranzystora polowego KP707V2 lub innego, w którym maksymalny prąd drenu wynosi 4 A, a maksymalne napięcie dren-źródło 700 V. Aby otrzymać wyniki zautomatyzowanego projektowania SMPS, wystarczy kliknąć na przycisk BOM (Bill Of Materials) na pasku narzędzi DS (patrz rys. 6), po czym pojawi się okno BOM List (rys. 14) . Jeżeli lista elementów wymaga wydrukowania, kliknij przycisk Drukuj.
Przypomnijmy, że obliczenia przeprowadzono dla SMPS z przełączaniem VIPer, ale w rzeczywistości został on zmontowany na podstawie kontrolera PWM UC3842. Pomimo wszystkich podobieństw i podobieństw, nadal istnieje znacząca różnica, której w żadnym wypadku nie należy ignorować. Wiąże się to z tym, że w pierwszym przypadku rezystor zadawania częstotliwości jest podłączony bezpośrednio do zasilania układu +15 V, aw drugim - do wewnętrznego źródła stabilizowanego napięcia +5 V. Dlatego Aby zapewnić wymaganą częstotliwość impulsów przełączających f = 30 kHz przy średniej wartości współczynnika wypełnienia D = (0,18 + 0,24)/2 = 0,21, konieczna jest korekta parametrów znamionowych obwodu RC zadawania częstotliwości. Częstotliwość oscylatora w układzie UC3842 jest określana w zależności od wartości znamionowych obwodu RC przez stosunek f-1,72 / RC. Czas tOFF, podczas którego tranzystor przełączający pozostaje wyłączony (patrz rys. 1), jest powiązany z okresem impulsu T i cyklem roboczym D przez równość tOFF = T(1-D). Z drugiej strony czas ten jest również określony parametrami obwodu RC: tOFF = RCIn[(0,00063R-2,7)/(0,00063R-4)]. Podstawiając te wzory, a następnie potęgując ostatnią równość, otrzymujemy równanie R = {2,7-4exp[(1-D)/1,72]}/ /{0,00063[1-exp[(1-D)/1,72 ,XNUMX]] }. Na podstawie wymaganego średniego współczynnika wypełnienia D = 0,21 otrzymujemy R = 9,889 kΩ i C = 5798 pF. Być może próbne załączenie SMPS-ów wykaże, że wymagają one jakiejś regulacji.Aby wykluczyć znaczne odchylenie częstotliwości i cyklu pracy impulsów przełączających od obliczonych, polecam cyfrowym przyrządem pomiarowym do doboru rezystora i kondensatora z wymaganymi wartościami. Opracowane urządzenie można udoskonalić np. dodając synchronizację częstotliwości pracy sterownika PWM z zewnętrznym źródłem napięcia pulsacyjnego, zdalne wyłączanie SMPS, wtórną pętlę sterowania napięciem wyjściowym oraz miękki start z wykorzystaniem permaloju molibdenowego , a także nowoczesne obwody magnetyczne GAMMAMET [9]. literatura
Autor: S. Kosenko, Woroneż
Maszyna do przerzedzania kwiatów w ogrodach
02.05.2024 Zaawansowany mikroskop na podczerwień
02.05.2024 Pułapka powietrzna na owady
01.05.2024
▪ Kontroluj jasność bez suwaka ▪ Klawiatura mechaniczna Hexgears Hyeku F2 ▪ Materiał odbudowujący tkankę nerwową za pomocą impulsów elektrycznych
▪ sekcja serwisu Regulatory prądu, napięcia, mocy. Wybór artykułów ▪ Artykuł Pittakusa. Słynne aforyzmy ▪ artykuł Jak mierzy się głębokość oceanu? Szczegółowa odpowiedź ▪ artykuł Proso afrykańskie. Legendy, uprawa, metody aplikacji ▪ artykuł Tranzystory MOSFET mocy. Encyklopedia elektroniki radiowej i elektrotechniki ▪ artykuł Obwód oscylacyjny. Encyklopedia elektroniki radiowej i elektrotechniki
Strona główna | biblioteka | Artykuły | Mapa stony | Recenzje witryn
www.diagram.com.ua |










 Zostaw swój komentarz do tego artykułu:
Zostaw swój komentarz do tego artykułu: