|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese
Notatki z wykładów, ściągawki
Elektronika ogólna i elektrotechnika. Ściągawka: krótko, najważniejsza
Katalog / Notatki z wykładów, ściągawki Spis treści
1. HISTORIA ELEKTRONIKI Podstawą powstania i rozwoju elektroniki była praca fizyków w XVIII i XIX wieku. Pierwsze na świecie badania wyładowań elektrycznych w powietrzu przeprowadzono w XVIII wieku. w Rosji przez akademików Łomonosow и Richmann i niezależnie od nich amerykańscy naukowcy Franklina. Ważnym wydarzeniem było odkrycie łuku elektrycznego przez akademika Pietrowa w 1802. Badania procesów przepływu prądu elektrycznego w rozrzedzonych gazach przeprowadzono w ubiegłym wieku w Anglii Oszuści, Thomson, Townsend, Aston, w Niemczech Geisler, Gittorf, Plücker i inne. W 1873 r. Lodygin wynalazł pierwsze na świecie elektryczne urządzenie próżniowe - żarówkę. Niezależnie od niego nieco później ta sama lampa została stworzona i udoskonalona przez amerykańskiego wynalazcę Edisona. Łuk elektryczny został po raz pierwszy użyty do celów oświetleniowych Jabłoczkow w 1876 r. w 1887 r. niemiecki fizyk Hertz odkrył efekt fotoelektryczny. Emisja termionowa została odkryta w 1884 roku przez Edisona. W 1901 r. Richardson przeprowadził szczegółowe badania emisji termojonowej. Pierwsza lampa elektronopromieniowa z zimną katodą została zbudowana w 1897 roku. brązowy (Niemcy). Wykorzystanie urządzeń elektronicznych w radiotechnice zaczęło się od tego, że w 1904 r. angielski naukowiec Fleming zastosował lampę dwuelektrodową z katodą żarową do prostowania drgań o wysokiej częstotliwości w odbiorniku radiowym. W 1907 amerykański inżynier Lee de Forest wprowadził siatkę do lampki kontrolnej, czyli stworzył pierwszą triodę. W tym samym roku profesor Instytutu Technologicznego w Petersburgu Różanie się zaproponował użycie lampy elektronopromieniowej do odbioru obrazów telewizyjnych iw kolejnych latach przeprowadził eksperymentalne potwierdzenie swoich pomysłów. W latach 1909-191 w Rosji Kowalenkow stworzył pierwsze triody do wzmocnienia dalekosiężnej komunikacji telefonicznej. Ogromne znaczenie miało wynalezienie żarzonej katody. Czernyszew w 1921. W 1926 Hell w USA udoskonalił lampy z siatką ekranującą, a w 1930 zaproponował pentodę, która stała się jedną z najpopularniejszych lamp. W 1930 r Kubeckiego wynaleźli fotopowielacze, w których projektach Wekszynskij i Timofiejew wnieśli znaczący wkład. Pierwsza propozycja specjalnych kineskopów telewizyjnych powstała niezależnie w latach 1930-1931. Konstantinow i Kataev. Podobne tuby, zwane ikonoskopami, zbudowano w USA Zworykin. Wynalezienie takich lamp otworzyło nowe możliwości rozwoju telewizji. Nieco później w 1933 roku. Szmakow и Timofeev zaproponowali nowe, bardziej czułe tuby nadawcze (superkonoskopy lub superemitery), które umożliwiły prowadzenie transmisji telewizyjnych bez silnego sztucznego oświetlenia. rosyjski radiofizyk Rozhanovsky w 1932 zaproponował stworzenie nowych urządzeń z modulacją prędkości przepływu elektronów. Zgodnie z jego pomysłami Arsen'eva i Heil zbudowali w 1939 roku pierwsze tego typu urządzenia do wzmacniania i generowania oscylacji mikrofalowych, zwane klistronami przejściowymi. W 1940 Kovalenko wynalazł prostszy klistron odbijający, który jest szeroko stosowany do generowania oscylacji mikrofalowych. Duże znaczenie dla techniki fal decymetrowych miały prace Devyatkova, Daniltseva, Khokhlova и Gurewicz, które w latach 1938-1941. zaprojektowane specjalne triody z płaskimi elektrodami dyskowymi. Zgodnie z tą zasadą lampy cermetalowe były produkowane w Niemczech, a lampy ostrzegawcze w USA. 2. URZĄDZENIA PÓŁPRZEWODNIKOWE W porównaniu z lampami próżniowymi urządzenia półprzewodnikowe mają znaczące Zalety: 1) niewielka waga i mały rozmiar; 2) brak zużycia energii na ogrzewanie; 3) wyższa niezawodność w działaniu i długa żywotność (do kilkudziesięciu tysięcy godzin); 4) wysoka wytrzymałość mechaniczna (odporność na wstrząsy, wstrząsy i inne rodzaje przeciążeń mechanicznych); 5) różne urządzenia (prostowniki, wzmacniacze, generatory) z urządzeniami półprzewodnikowymi mają wysoką wydajność, ponieważ straty energii w samych urządzeniach są nieznaczne; 6) urządzenia małej mocy z tranzystorami mogą pracować przy bardzo niskich napięciach zasilania; 7) zasady budowy i działania przyrządów półprzewodnikowych są wykorzystywane do tworzenia nowego ważnego kierunku w rozwoju elektroniki - mikroelektroniki półprzewodnikowej. Jednocześnie urządzenia półprzewodnikowe mają obecnie następujące niedogodności: 1) parametry i właściwości poszczególnych instancji urządzeń tego typu mają znaczny rozrzut; 2) właściwości i parametry urządzeń silnie zależą od temperatury; 3) następuje zmiana właściwości urządzeń w czasie (starzenie); 4) ich własny hałas w niektórych przypadkach jest większy niż hałas urządzeń elektronicznych; 5) większość typów tranzystorów nie nadaje się do pracy przy częstotliwościach powyżej kilkudziesięciu megaherców; 6) rezystancja wejściowa większości tranzystorów jest znacznie mniejsza niż w przypadku lamp próżniowych; 7) nie są jeszcze produkowane tranzystory na tak duże moce, jak urządzenia elektropróżniowe; 8) działanie większości urządzeń półprzewodnikowych ulega gwałtownemu pogorszeniu pod wpływem promieniowania radioaktywnego. Tranzystory są z powodzeniem stosowane we wzmacniaczach, odbiornikach, nadajnikach, generatorach, telewizorach, przyrządach pomiarowych, obwodach impulsowych, elektronicznych maszynach liczących itp. Zastosowanie przyrządów półprzewodnikowych daje ogromne oszczędności w zużyciu energii elektrycznej ze źródeł zasilania i umożliwia zmniejszenie wielokrotność wielkości sprzętu. Trwają badania nad udoskonaleniem urządzeń półprzewodnikowych poprzez zastosowanie do nich nowych materiałów. Stworzono prostowniki półprzewodnikowe na prądy o natężeniu tysięcy amperów. Zastosowanie krzemu zamiast germanu umożliwia pracę urządzeń w temperaturach do 125”C i wyższych. Tranzystory zostały stworzone dla częstotliwości do setek megaherców i więcej, a także nowe typy przyrządów półprzewodnikowych dla częstotliwości mikrofalowych. wymiana lamp elektronowych na urządzenia półprzewodnikowe została z powodzeniem przeprowadzona w wielu urządzeniach radiotechnicznych.Przemysł produkuje dużą liczbę diod półprzewodnikowych i tranzystorów różnego typu. 3. RUCH ELEKTRONÓW W JEDNORODNYM POLU ELEKTRYCZNYM Oddziaływanie elektronów z polem elektrycznym jest głównym procesem w urządzeniach elektropróżniowych i półprzewodnikowych. Elektron to cząstka materii o ujemnym ładunku elektrycznym, której wartość bezwzględna wynosi e = 1,610-19C. Masa nieruchomego elektronu wynosi m = 9,110-28g. Wraz ze wzrostem prędkości ruchu wzrasta masa elektronów. teoretycznie przy prędkości równej c = 3m/s masa elektronu powinna być nieskończenie duża. W konwencjonalnych urządzeniach elektropróżniowych prędkość elektronów nie przekracza 108 s. W tych warunkach masę elektronu można uznać za stałą, równą m. Jeśli różnica potencjałów między elektrodami wynosi U, a odległość między nimi wynosi d, wówczas natężenie pola wynosi: E \uXNUMXd U / d. Dla jednolitego pola elektrycznego wartość E jest stała. Niech elektron o energii kinetycznej W0 i początkowej prędkości v0 skierowanej wzdłuż linii pola zostanie wyemitowany z elektrody o niższym potencjale, na przykład z katody. Pole działa na elektron i przyspiesza jego ruch do elektrody o wyższym potencjale, takiej jak anoda. Oznacza to, że elektron jest przyciągany do elektrody o wyższym potencjale. W tym przypadku pole nazywa się przyspieszenie. W przyspieszającym polu następuje wzrost energii kinetycznej elektronu w wyniku pracy pola w ruchu elektronu. Zgodnie z prawem zachowania energii wzrost energii kinetycznej elektronu W-W0 jest równy pracy pola, która jest określona przez iloczyn przeniesionego ładunku e i różnicy potencjałów U przez niego przechodzącej : W W! = mv2/2 - mv20/2 = eU. Jeżeli początkowa prędkość elektronu jest równa zeru, to W0 = mv20/2 = 0 i W=mv2/2 = eU, czyli energia kinetyczna elektronu jest równa pracy pola. Prędkość elektronu w przyspieszającym polu zależy od różnicy potencjałów, przez które przechodzi. Niech kierunek prędkości początkowej elektronu v0 będzie przeciwny do siły F działającej na elektron od strony pola, tzn. elektron wylatuje z pewną prędkością początkową od elektrody o wyższym potencjale. Ponieważ siła F jest skierowana w kierunku prędkości v0, elektron jest hamowany i porusza się po linii prostej, jednostajnie wolno. Pole w tym przypadku nazywa się opóźnieniem. Dlatego pole to dla jednych elektronów przyspiesza, a dla innych zwalnia, w zależności od kierunku początkowej prędkości elektronu. W spowalniającym polu elektron oddaje energię do tego pola. W przeciwnym kierunku elektron porusza się bez prędkości początkowej w polu przyspieszającym, które zwraca elektronowi energię utraconą przez niego podczas ruchu zwolnionego. Jeżeli elektron wlatuje z prędkością początkową v0 pod kątem prostym do kierunku linii pola, to pole działa na elektron z siłą F określoną wzorem f = eE i skierowaną na wyższy potencjał. W przypadku braku siły, Rpotencjał wykonałby jednostajny ruch bezwładności z prędkością v0. A pod działaniem siły F elektron musi poruszać się z równomiernym przyspieszeniem w kierunku prostopadłym do v0. Powstały ruch elektronu odbywa się wzdłuż paraboli, a elektron jest odchylany w kierunku elektrody dodatniej. Jeśli elektron nie spadnie na tę elektrodę i wyjdzie poza pole, to będzie nadal poruszał się bezwładnie po linii prostej i jednostajnie. Elektron porusza się po pewnej paraboli i albo uderza w jedną z elektrod, albo opuszcza pole. Pole elektryczne zawsze zmienia energię kinetyczną i prędkość elektronu w jednym lub drugim kierunku. Zatem zawsze istnieje oddziaływanie energetyczne między elektronem a polem elektrycznym, tj. wymiana energii. Jeśli początkowa prędkość elektronu nie jest skierowana wzdłuż linii siły, ale pod pewnym kątem do nich, to pole elektryczne również zakrzywia trajektorię elektronu. 4. RUCH ELEKTRONÓW W NIEJEDNOLITYM POLU ELEKTRYCZNYM dla niejednorodne pola elektryczne charakteryzuje się zróżnicowaną i często złożoną strukturą. Istnieje wiele niejednorodnych pól, które nie są do siebie podobne, w których intensywność zmienia się z punktu do punktu zgodnie z różnymi prawami, a linie sił są zwykle krzywymi o takiej czy innej formie. Najprostszym jest pole rodnikowo niejednorodne, często spotykane w urządzeniach elektropróżniowych, które powstaje pomiędzy cylindrycznymi elektrodami. Jeżeli początkowa prędkość elektronu emitowanego z powierzchni elektrody wewnętrznej jest skierowana wzdłuż linii siły, to elektron będzie poruszał się po linii prostej i przyspieszał wzdłuż promienia. Ale gdy oddalasz się od elektrody wewnętrznej, siła pola i siła działająca na elektron maleją, co oznacza, że przyspieszenie również maleje. W bardziej ogólnym przypadku pole niejednorodne ma linie sił w postaci linii zakrzywionych. Jeśli to pole przyspiesza, to elektron o początkowej prędkości v0 porusza się po trajektorii krzywoliniowej, która ma taką samą krzywiznę jak linie sił. Siła F działa na elektron od strony pola, skierowana pod kątem do własnego wektora prędkości elektronu. Siła ta zagina trajektorię elektronu i zwiększa jego prędkość. W tym przypadku trajektoria elektronu nie pokrywa się z linią pola. Gdyby elektron nie miał masy, a zatem bezwładności, poruszałby się wzdłuż linii siły. Jednak elektron ma masę i ma tendencję do poruszania się bezwładnością w linii prostej z prędkością uzyskaną podczas poprzedniego ruchu. Siła działająca na elektron jest skierowana stycznie do linii pola iw przypadku zakrzywionych linii pola tworzy kąt z wektorem prędkości elektronu. Dlatego trajektoria elektronu jest zakrzywiona, ale „opóźnia się” w tej krzywiźnie od linii siły z powodu bezwładności elektronu. W przypadku spowalniającego pola niejednorodnego o zakrzywionych liniach pola, siła działająca na elektron z pola również zagina trajektorię elektronu i zmienia jego prędkość. Ale krzywiznę trajektorii uzyskuje się w kierunku przeciwnym do tego, do którego wygięte są linie siły, to znaczy trajektoria elektronu ma tendencję do oddalania się od linii siły. W tym przypadku prędkość elektronu maleje, gdy przechodzi on do punktów o bardziej ujemnym potencjale. Rozważmy ruch przepływu elektronów w polu niejednorodnym, pomijając dla uproszczenia wzajemne oddziaływanie elektronów. Niech przepływ elektronów porusza się w przyspieszającym polu niejednorodnym, które jest symetryczne względem średniej prostej linii siły. W tym przypadku linie sił zbiegają się w kierunku ruchu elektronu, czyli siła pola wzrasta. Nazwijmy takie pole zbieżny. Niech strumień elektronów wleci w to pole, którego prędkości są skierowane równolegle. Trajektorie elektronów są wygięte w tym samym kierunku, w którym wygięte są linie sił. I tylko przeciętny elektron porusza się prostoliniowo wzdłuż średniej linii siły. W rezultacie elektrony zbliżają się do siebie, tj. uzyskuje się skupienie przepływu elektronów, przypominające ogniskowanie strumienia światła za pomocą soczewki skupiającej. Ponadto wzrasta prędkość elektronów. Jeśli linie sił rozchodzą się w kierunku ruchu elektronu, to pole można umownie nazwać rozbieżny. W nim przepływ elektronów jest rozproszony, ponieważ trajektorie elektronów oddalają się od siebie podczas krzywizny. Dlatego przyspieszające pole rozbieżne jest soczewką rozpraszającą dla wiązki elektronów. Jeśli pole zwalnia i zbiega się, to nie ma ogniskowania, ale rozpraszanie elektronów ze spadkiem ich prędkości. I odwrotnie, w spowalniającym polu rozbieżnym uzyskuje się ogniskowanie wiązki elektronów. 5. RUCH ELEKTRONÓW W JEDNOLITYM POLU MAGNETYCZNYM Niektóre urządzenia elektropróżniowe wykorzystują ruch elektronów w polu magnetycznym. Rozważmy przypadek, w którym elektron leci w jednorodne pole magnetyczne z początkową prędkością v0 skierowaną prostopadle do linii pola magnetycznego. W tym przypadku na poruszający się elektron działa tak zwana siła Lorentza F, która jest prostopadła do wektora h0 i wektora pola magnetycznego H. Wielkość siły F określa wyrażenie: F = ev0H. Dla v0 = 0 siła P jest równa zeru, tj. pole magnetyczne nie działa na nieruchomy elektron. Siła F zagina trajektorię elektronu w łuk kołowy. Ponieważ siła F działa pod kątem prostym do prędkości h0, nie działa. Energia elektronu i jego prędkość nie zmieniają się pod względem wielkości. Następuje tylko zmiana kierunku prędkości. Wiadomo, że ruch ciała po okręgu (obrót) ze stałą prędkością uzyskuje się na skutek działania siły dośrodkowej skierowanej w kierunku środka, czyli właśnie siły F. Kierunek obrotu elektronu w polu magnetycznym zgodnie z zasadą lewej ręki jest dogodnie określony przez następujące zasady. Patrząc w kierunku linii pola magnetycznego, elektron porusza się zgodnie z ruchem wskazówek zegara. Innymi słowy, obrót elektronu zbiega się z ruchem obrotowym śruby, która jest wkręcana w kierunku linii pola magnetycznego. Wyznaczmy promień r okręgu opisanego przez elektron. W tym celu używamy wyrażenia na siłę dośrodkową znanego z mechaniki: F = mv20/r. Przyrównajmy to do wartości siły F = ev0H: mv20/r = ev0H. Teraz z tego równania możesz znaleźć promień: r= mv0/(eH). Im większa prędkość elektronu v0, tym silniejsza ma tendencję do poruszania się prostoliniowo przez bezwładność, a promień krzywizny trajektorii będzie większy. Z drugiej strony wraz ze wzrostem H siła F wzrasta, krzywizna trajektorii wzrasta, a promień okręgu maleje. Wyprowadzony wzór obowiązuje dla ruchu cząstek o dowolnej masie i ładunku w polu magnetycznym. Rozważ zależność r od mi e. Naładowana cząstka o większej masie m ma tendencję do lotu prostoliniowego przez bezwładność, a krzywizna trajektorii zmniejszy się, tj. stanie się większa. A im większy ładunek e, tym większa siła F i bardziej zakrzywiona trajektoria, czyli jej promień staje się mniejszy. Po wyjściu poza pole magnetyczne elektron leci dalej w linii prostej bezwładnością. Jeśli promień trajektorii jest mały, to elektron może opisywać zamknięte koła w polu magnetycznym. Zatem pole magnetyczne zmienia tylko kierunek prędkości elektronu, ale nie jego wielkość, tj. nie ma interakcji energetycznej między elektronem a polem magnetycznym. W porównaniu z polem elektrycznym wpływ pola magnetycznego na elektrony jest bardziej ograniczony. Dlatego pole magnetyczne jest używane do oddziaływania na elektrony znacznie rzadziej niż pole elektryczne. 6. ELEKTRONY W STANIE SOLIDNYM Współczesna fizyka dowiodła, że elektrony w ciele nie mogą mieć dowolnych energii. Energia każdego elektronu może przyjmować tylko określone wartości, zwane poziomy energii (or poziomy energii). Elektrony znajdujące się bliżej jądra atomu mają niższe energie, to znaczy są na niższych poziomach energetycznych. Aby usunąć elektron z jądra, konieczne jest przezwyciężenie wzajemnego przyciągania elektronu i jądra. To wymaga trochę energii. Dlatego elektrony daleko od jądra mają wysokie energie; są na wyższych poziomach energii. Kiedy elektron przechodzi z wyższego poziomu energii na niższy, uwalniana jest pewna ilość energii, zwana kwantem (lub fotonem). Jeśli atom pochłonie jeden kwant energii, elektron przesuwa się z niższego poziomu energetycznego na wyższy. Zatem energia elektronów zmienia się tylko w kwantach, czyli w określonych porcjach. Rozkład elektronów według poziomów energetycznych jest pokazany schematycznie: energia W elektronu jest wykreślona pionowo, a poziomy energii są pokazane liniami poziomymi. Zgodnie z tak zwaną teorią stref półprzewodnikowych poziomy energetyczne są łączone w oddzielne strefy. Elektrony zewnętrznej powłoki atomu wypełniają szereg poziomów energii, które tworzą pasmo walencyjne. Niższe poziomy energetyczne są częścią innych pasm wypełnionych elektronami, ale pasma te nie odgrywają roli w zjawisku przewodnictwa elektrycznego i dlatego nie są pokazane na rysunku. W metalach i półprzewodnikach znajduje się duża liczba elektronów I wyższe poziomy energii. Te poziomy tworzą pasmo przewodnictwa. Elektrony tej strefy, zwane elektronami przewodzącymi, poruszają się losowo wewnątrz ciała, przechodząc od jednego atomu do drugiego. To właśnie elektrony przewodzące zapewniają wysoką przewodność elektryczną metali. Atomy substancji, które przekazały elektrony do pasma przewodnictwa, można uznać za jony dodatnie. Ułożone są w określonej kolejności, tworząc przestrzenną siatkę, inaczej zwaną jonową lub krystaliczną. Stan tej sieci odpowiada równowadze sił oddziaływania między atomami i minimalnej wartości całkowitej energii wszystkich cząstek ciała. Wewnątrz sieci przestrzennej następuje losowy ruch elektronów przewodzących. Dielektryki charakteryzują się odmienną strukturą energetyczną. Mają przerwę wzbronioną między pasmem przewodnictwa a pasmem walencyjnym, odpowiadającą poziomom energii, na których nie mogą znajdować się elektrony. W normalnej temperaturze dielektryki mają bardzo małą liczbę elektronów w paśmie przewodnictwa, a zatem dielektryk ma znikomą przewodność. Ale po podgrzaniu niektóre elektrony z pasma walencyjnego, otrzymując dodatkową energię, przechodzą do pasma przewodnictwa, a następnie dielektryk uzyskuje zauważalną przewodność elektryczną. Półprzewodniki w niskich temperaturach są izolatorami, a w normalnej temperaturze znaczna liczba elektronów przechodzi z pasma walencyjnego do pasma przewodnictwa. Obecnie do produkcji urządzeń półprzewodnikowych najczęściej stosuje się german i krzem, które mają wartościowość 4. Przestrzenna sieć krystaliczna germanu lub krzemu składa się z atomów połączonych ze sobą elektronami walencyjnymi. Takie wiązanie nazywa się wiązaniem kowalencyjnym lub wiązaniem para-elektronowym. 7. WŁASNY ELEKTRON I OTWORY PRZEWODNOŚCI ELEKTRYCZNEJ Półprzewodniki to substancje, które pod względem przewodnictwa elektrycznego zajmują środkową pozycję między przewodnikami a dielektrykami. dla półprzewodniki charakteryzuje się ujemnym współczynnikiem temperaturowym oporu elektrycznego. Wraz ze wzrostem temperatury rezystancja półprzewodników maleje, a nie wzrasta, jak w przypadku większości przewodników litych. Ponadto opór elektryczny półprzewodników zależy w dużej mierze od ilości zanieczyszczeń, a także od takich wpływów zewnętrznych jak światło, pole elektryczne, promieniowanie jonizujące itp. W półprzewodnikach istnieją dwa rodzaje przewodnictwa elektrycznego. Podobnie jak metale, półprzewodniki mają elektronową przewodność elektryczną, która wynika z ruchu elektronów przewodzących. W zwykłych temperaturach pracy półprzewodniki zawsze zawierają elektrony przewodzące, które są bardzo słabo związane z jądrami atomów i wykonują losowy ruch termiczny między atomami sieci krystalicznej. Elektrony te, pod działaniem różnicy potencjałów, mogą otrzymać dodatkowy ruch w określonym kierunku, którym jest prąd elektryczny. Półprzewodniki mają również przewodność elektryczną dziur, której nie obserwuje się w metalach. W półprzewodnikach sieć krystaliczna jest dość silna. Jego jony, czyli atomy pozbawione jednego elektronu, nie poruszają się, lecz pozostają na swoich miejscach. Tradycyjnie nazywa się brak elektronu w atomie otwór. Podkreśla to, że w atomie brakuje jednego elektronu, czyli powstała wolna przestrzeń. Dziury zachowują się jak elementarne ładunki dodatnie. W przypadku przewodnictwa elektrycznego dziur elektrony również się poruszają, ale w bardziej ograniczonym zakresie niż w przypadku przewodnictwa elektrycznego elektronu. Elektrony przechodzą z tych atomów tylko do sąsiednich. Skutkiem tego jest ruch ładunków dodatnich – dziur – w kierunku przeciwnym do ruchu elektronów. Elektrony i dziury, które mogą się poruszać, a tym samym wytwarzać przewodność elektryczną, nazywane są operatorzy opłat mobilnych lub po prostu nośniki ładunku. Zwyczajowo mówi się, że pod działaniem ciepła powstają pary nośników ładunku, tj. Powstają pary: elektron przewodzący - dziura przewodząca. Ze względu na fakt, że elektrony przewodzące i dziury wykonują chaotyczny ruch termiczny, koniecznie zachodzi odwrotny proces generowania par nośników. Elektrony przewodzące ponownie zajmują wolne miejsca w paśmie walencyjnym, tj. łączą się z dziurami. To zniknięcie par nosicieli nazywa się rekombinacja nośników ładunku. Procesy generowania i rekombinacji par nośników zawsze zachodzą jednocześnie. Półprzewodnik bez zanieczyszczeń nazywany jest półprzewodnikiem samoistnym. Posiada własną przewodność elektryczną, na którą składa się przewodnictwo elektryczne i dziurowe. W tym przypadku, mimo że liczba elektronów i dziur przewodzących w samoistnym półprzewodniku jest taka sama, przeważa elektronowe przewodnictwo elektryczne, co tłumaczy się większą ruchliwością elektronów w porównaniu z ruchliwością dziur. 8. ZANIECZYSZCZENIE PRZEWODNOŚĆ ELEKTRYCZNA Jeśli półprzewodnik zawiera zanieczyszczenia innych substancji, to oprócz własnej przewodności elektrycznej pojawia się również przewodność elektryczna zanieczyszczenia, która w zależności od rodzaju zanieczyszczenia może być elektroniczna lub dziura. Na przykład, german, będąc czterowartościowym, ma przewodność elektronową zanieczyszczeń, jeśli doda się do niego pięciowartościowy antymon i arsen. Ich atomy oddziałują z atomami germanu tylko czterema ich elektronami, a piąty elektron przypada na pasmo przewodnictwa. W rezultacie uzyskuje się pewną ilość dodatkowych elektronów przewodzących. Nazywa się zanieczyszczenia, w których atomy oddają elektrony darczyńców. Atomy dawcy tracą elektrony i stają się naładowane dodatnio. Półprzewodniki z przewagą elektronicznego przewodnictwa elektrycznego nazywane są półprzewodnikami elektronicznymi lub półprzewodnikami typu n. Substancje, które pobierają elektrony i tworzą przewodność elektryczną dziury zanieczyszczeń, nazywane są akceptantów. Atomy akceptorowe, wychwytujące elektrony, same stają się naładowane ujemnie. Półprzewodniki z przewagą przewodności elektrycznej dziur są nazywane półprzewodnikami dziurkowymi lub półprzewodnikami typu p. Urządzenia półprzewodnikowe wykorzystują głównie półprzewodniki zawierające zanieczyszczenia donorowe lub akceptorowe i nazywane są zanieczyszczeniami. W normalnych temperaturach roboczych w takich półprzewodnikach wszystkie atomy zanieczyszczeń uczestniczą w tworzeniu przewodnictwa elektrycznego zanieczyszczenia, tj. każdy atom zanieczyszczenia oddaje lub przechwytuje jeden elektron. Aby przewodność elektryczna domieszki dominowała nad przewodnością wewnętrzną, stężenie atomów zanieczyszczenia donorowego lub akceptorowego musi przekraczać stężenie wewnętrznych nośników ładunku. Nośniki ładunku, których koncentracja w danym półprzewodniku przeważa, nazywane są głównymi. Są to elektrony w półprzewodniku typu n i dziury w półprzewodniku typu p. Nazywane są nośniki ładunku mniejszościowego, których stężenie jest mniejsze niż stężenie nośników większościowych. Stężenie nośników mniejszościowych w półprzewodniku z domieszką zmniejsza się tyle razy, ile wzrasta stężenie nośników większościowych. Jeśli w germanie była pewna liczba elektronów, a po dodaniu domieszki donorowej stężenie elektronów wzrosło 1000 razy, to stężenie nośników mniejszościowych (dziur) zmniejszy się 1000 razy, tj. będzie milion razy mniejsza niż koncentracja głównych przewoźników. Tłumaczy się to tym, że przy 1000-krotnym wzroście stężenia elektronów przewodzących uzyskanych z atomów donorowych, niższe poziomy energetyczne pasma przewodnictwa okazują się zajęte i przejście elektronów z pasma walencyjnego jest możliwe tylko wyższe poziomy pasma przewodnictwa. Ale dla takiego przejścia elektrony muszą mieć wysoką energię, a zatem może je przeprowadzić znacznie mniejsza liczba elektronów. Odpowiednio, liczba dziur przewodzących w paśmie walencyjnym znacznie się zmniejsza. Tak więc pomijalnie mała ilość zanieczyszczenia znacząco zmienia charakter przewodnictwa elektrycznego i wielkość przewodnictwa półprzewodnika. Uzyskanie półprzewodników o tak niskiej i ściśle dozowanej zawartości pożądanego domieszki jest procesem bardzo złożonym. W takim przypadku początkowy półprzewodnik, do którego dodaje się zanieczyszczenie, musi być bardzo czysty. 9. DYFUZJA NOŚNIKÓW ŁADUNKU W PÓŁPRZEWODNIKACH W półprzewodnikach oprócz prądu przewodzenia może występować również prąd dyfuzyjny, którego przyczyną nie jest różnica potencjałów, ale różnica stężeń nośników. Poznajmy istotę tego nurtu. Jeżeli koncentracja nośników ładunku jest rozłożona równomiernie w półprzewodniku, to jest to równowaga. Pod wpływem jakichkolwiek zewnętrznych wpływów w różnych częściach półprzewodnika, stężenie może stać się nierówne, tj. nierównowaga. Na przykład, jeśli część półprzewodnika zostanie wystawiona na promieniowanie, to proces generowania par nośników będzie się w nim intensyfikował i pojawi się dodatkowa koncentracja nośników, tzw. zbędny. Ponieważ nośniki posiadają własną energię kinetyczną, zawsze mają tendencję do przemieszczania się z miejsc o wyższym stężeniu do miejsc o niższym stężeniu, tj. e. mają tendencję do wyrównywania stężenia. Zjawisko dyfuzji obserwuje się dla wielu cząstek materii, a nie tylko dla ruchomych nośników ładunku. Dyfuzja jest zawsze spowodowana nierównomierną koncentracją cząstek, a sama dyfuzja odbywa się dzięki własnej energii ruchu termicznego cząstek. Rozproszony ruch ruchomych nośników ładunku (elektronów i dziur) jest prądem rozproszonym /. Ten prąd, podobnie jak prąd przewodzenia, może być elektronem lub dziurą. Gęstości tych prądów są określone następującymi wzorami: i = eDn ?n /?x oraz ip=- eDp?p /?x, gdzie wielkości ?n/?x i ?c/?x są tzw. gradienty stężeń, a Dn i Dp są współczynnikami dyfuzji. Gradient stężenia charakteryzuje, jak gwałtownie zmienia się stężenie wzdłuż odległości x, tj. jaka jest zmiana stężenia n lub p na jednostkę długości. Jeżeli nie ma różnicy stężeń, to n=0 lub ?p=0 i nie występuje prąd dyfuzyjny. A im większa zmiana stężenia fin lub AP w danej odległości ax, tym większy prąd dyfuzji. Współczynnik dyfuzji charakteryzuje intensywność procesu dyfuzji. Jest proporcjonalna do ruchliwości nośników, różna dla różnych substancji i zależy od temperatury. Współczynnik dyfuzji dla elektronów jest zawsze większy niż dla dziur. Znak minus po prawej stronie wzoru na gęstość prądu dyfuzji dziur jest ustawiony, ponieważ prąd dziury jest skierowany w kierunku malejącej koncentracji dziur. Jeżeli z powodu jakiegoś zewnętrznego wpływu w pewnej części półprzewodnika powstanie nadmierne stężenie nośników, a następnie wpływ zewnętrzny ustanie, wówczas nadmiarowe nośniki ulegną rekombinacji i propagacji przez dyfuzję do innych części półprzewodnika. Wielkość charakteryzująca proces zmniejszania się nadmiaru stężenia w czasie nazywana jest czasem życia nośników nierównowagowych. Rekombinacja nośników nierównowagowych zachodzi w masie półprzewodnika i na jego powierzchni i silnie zależy od zanieczyszczeń, a także od stanu powierzchni. Podczas dyfuzyjnej propagacji nośników nierównowagowych, takich jak elektrony, wzdłuż półprzewodnika, ich stężenie również maleje wraz z odległością w wyniku rekombinacji. 10. POŁĄCZENIE ELEKTRON-DZIURKA PRZY BRAKU NAPIĘCIA ZEWNĘTRZNEGO Nazywa się region na granicy dwóch półprzewodników o różnych typach przewodności elektrycznej elektronodziura, lub przejście p-p. Przejście elektron-dziura ma właściwość asymetrycznego przewodnictwa, tj. ma nieliniową rezystancję. Działanie większości urządzeń półprzewodnikowych stosowanych w radioelektronice opiera się na wykorzystaniu właściwości jednego lub więcej złączy pn. Rozważmy procesy fizyczne w takim przejściu. Niech na złączu nie będzie żadnego zewnętrznego napięcia. Ponieważ nośniki ładunku w każdym półprzewodniku wykonują losowy ruch termiczny, tj. mają własne prędkości, następuje ich dyfuzja (penetracja) z jednego półprzewodnika do drugiego. Nośniki przemieszczają się z miejsca, w którym ich stężenie jest wysokie, do miejsca, w którym stężenie jest niskie. Tak więc elektrony dyfundują z półprzewodnika typu n do półprzewodnika typu p, a dziury dyfundują z półprzewodnika typu p do półprzewodnika typu n w przeciwnym kierunku. W wyniku dyfuzji nośników po obu stronach granicy między dwoma półprzewodnikami o różnych typach przewodności elektrycznej powstają ładunki przestrzenne o różnych znakach. W obszarze n powstaje dodatni ładunek kosmiczny. Tworzą go głównie dodatnio naładowane atomy donorów zanieczyszczeń oraz, w niewielkim stopniu, dziury, które weszły w ten obszar. Podobnie ujemny ładunek przestrzenny powstaje w obszarze p, utworzonym przez ujemnie naładowane atomy zanieczyszczenia akceptorowego i częściowo przez elektrony, które tu dotarły. Pomiędzy uformowanymi ładunkami kosmicznymi istnieje tak zwana stykowa różnica potencjałów i pole elektryczne. W złączu p-n powstaje potencjalna bariera, która zapobiega przejściu dyfuzji nośników. Im wyższe stężenie zanieczyszczeń, tym wyższe stężenie głównych nośników i większa ich ilość dyfunduje przez granicę. Zwiększa się gęstość ładunków kosmicznych i rośnie różnica potencjałów stykowych, czyli wysokość bariery potencjału. W tym przypadku zmniejsza się grubość złącza pn. Równolegle z ruchem dyfuzyjnym nośników większościowych przez granicę następuje ruch wsteczny nośników pod działaniem pola elektrycznego różnicy potencjałów stykowych. To pole przenosi dziury z regionu p z powrotem do regionu p, a elektrony z regionu p z powrotem do regionu p. W określonej temperaturze złącze pn znajduje się w stanie dynamicznej równowagi. Co sekundę pewna liczba elektronów i dziur dyfunduje przez granicę w przeciwnych kierunkach i pod działaniem pola ta sama ich liczba dryfuje w przeciwnym kierunku. Ruch nośników na skutek dyfuzji jest prądem dyfuzyjnym, a ruch nośników pod wpływem pola jest prądem przewodzącym. W dynamicznej równowadze przejścia prądy te są równe i mają przeciwny kierunek. Dlatego całkowity prąd płynący przez złącze wynosi zero, co powinno mieć miejsce w przypadku braku napięcia zewnętrznego. Każdy z prądów ma składnik elektronowy i dziurowy. Wartości tych składników są różne, ponieważ zależą od koncentracji i ruchliwości nośników. Wysokość bariery potencjału jest zawsze automatycznie ustawiana dokładnie w punkcie, w którym występuje równowaga, tj. prąd dyfuzyjny i prąd przewodzenia wzajemnie się kompensują. 11. PRZEJŚCIE ELEKTRONOWO-DZIUROWE POD DZIAŁANIEM NAPIĘCIA DO PRZODU Niech zewnętrzne źródło napięcia zostanie połączone biegunem dodatnim z półprzewodnikiem typu p, a biegunem ujemnym z półprzewodnikiem typu n. Pole elektryczne wytworzone w złączu pn przez napięcie stałe działa w kierunku pola różnicy potencjałów stykowych. Powstające pole staje się słabsze, a różnica potencjałów w złączu maleje, tj. zmniejsza się wysokość bariery potencjału, a prąd dyfuzyjny wzrasta. W końcu niższa bariera może pokonać większą liczbę przewoźników. Prąd przewodzenia prawie się nie zmienia, ponieważ zależy głównie od liczby nośników mniejszościowych, które ze względu na swoje prędkości termiczne wchodzą w obszar złącza p-n z objętości obszarów n- i p-. W przypadku braku zewnętrznego napięcia prąd rozproszony i prąd przewodzenia są sobie równe i wzajemnie się kompensują. Przy napięciu przewodzenia idif> iprov, a zatem całkowity prąd płynący przez złącze, tj. Prąd przewodzenia, nie jest już równy zeru: ipr \u0d idif - iprov> XNUMX. Jeśli bariera jest znacznie obniżona, to idiff „iprov i możemy założyć, że ipr ~ idif, tj. Prąd przewodzenia w złączu jest dyfuzją. Zjawisko wprowadzania nośników ładunku przez obniżoną barierę potencjału w rejon, w którym nośniki te są niewielkie, nazywa się wstrzykiwanie nośników ładunku. Obszar urządzenia półprzewodnikowego, z którego wstrzykiwane są nośniki, nazywany jest obszarem emitera lub emiterem. A region, do którego wstrzykiwane są nośniki ładunku, które są mniejsze dla tego regionu, nazywany jest regionem podstawowym lub bazowym. Tak więc, jeśli weźmiemy pod uwagę wstrzykiwanie elektronów, to obszar p jest emiterem, a obszar p jest podstawą. Przeciwnie, w przypadku wstrzykiwania dziur obszar p służy jako emiter, a obszar p jest podstawą. W urządzeniach półprzewodnikowych stężenie zanieczyszczeń, a co za tym idzie większości nośników, w obszarach n i p jest zwykle bardzo różne. Dlatego silnie dominuje iniekcja z rejonu o większej koncentracji nośników głównych. W związku z tym ten dominujący wtrysk daje nazwę emiter i podstawę. Na przykład, jeśli pp "pp, to wstrzyknięcie elektronów z obszaru p do obszaru p jest znacznie większe niż wstrzyknięcie dziur w przeciwnym kierunku. W tym przypadku obszar p jest uważany za emiter, a obszar p jest uważany za podstawę, ponieważ wstrzykiwanie dziur można pominąć. Przy napięciu przewodzenia zmniejsza się nie tylko bariera potencjału, ale także grubość warstwy barierowej. Prowadzi to do zmniejszenia odporności warstwy barierowej. Jego opór w kierunku do przodu jest niewielki. Ponieważ wysokość bariery przy braku napięcia zewnętrznego wynosi kilka dziesiątych wolta, aby znacznie obniżyć barierę i znacznie zmniejszyć rezystancję warstwy blokującej, wystarczy przyłożyć do złącza p-n tylko dziesiąte napięcie przewodzenia wolta. Dlatego znaczny prąd przewodzenia można uzyskać przy bardzo małym napięciu przewodzenia. Oczywiście przy pewnym napięciu przewodzenia możliwe jest całkowite zniszczenie bariery potencjału w złączu pn. Wtedy opór przejścia, czyli warstwy barierowej, stanie się bliski zeru i można go pominąć. Prąd przewodzenia w tym przypadku wzrośnie i będzie zależeć od rezystancji objętości obszarów pip. Teraz te rezystancje nie mogą być zaniedbane, ponieważ to oni pozostają w obwodzie i określają wielkość prądu. 12. POŁĄCZENIE OTWORU ELEKTRONOWEGO PRZY ODWROTNYM NAPIĘCIU Niech źródło napięcia zewnętrznego będzie podłączone biegunem dodatnim do obszaru n, a ujemnym do obszaru p. Pod wpływem takiego napięcia wstecznego przez kanał przepływa bardzo mały prąd wsteczny, co wyjaśniono w następujący sposób. Pole utworzone przez napięcie wsteczne jest dodawane do pola różnicy potencjałów styków. Powstałe pole jest wzmacniane. Już przy niewielkim wzroście bariery ruch dyfuzyjny nośników większościowych przez skrzyżowanie zatrzymuje się, ponieważ prędkości własne nośników są niewystarczające do pokonania bariery. A prąd przewodzenia pozostaje prawie niezmieniony, ponieważ zależy głównie od liczby nośników mniejszościowych, które wchodzą do regionu złącza pn z objętości regionów n i p. Usuwanie nośników mniejszościowych przez złącze pn przez przyspieszające pole elektryczne wytworzone przez zewnętrzne napięcie nazywa się ekstrakcja nośników ładunku. Tak więc prąd wsteczny jest praktycznie prądem przewodzenia powstałym w wyniku ruchu nośników mniejszościowych. Prąd wsteczny okazuje się bardzo mały, ponieważ nośników mniejszościowych jest niewiele, a ponadto rezystancja warstwy barierowej z napięciem wstecznym jest bardzo wysoka. Rzeczywiście, wraz ze wzrostem napięcia wstecznego, pole w obszarze przejściowym staje się silniejsze i pod wpływem tego pola więcej nośników większościowych jest „wypychanych” z warstw granicznych do wnętrza obszarów piro. Dlatego wraz ze wzrostem napięcia wstecznego wzrasta nie tylko wysokość bariery potencjału, ale także grubość warstwy barierowej. Warstwa ta staje się jeszcze bardziej uszczuplona w nośniki, a jej odporność znacznie wzrasta. Nawet przy stosunkowo małym napięciu wstecznym prąd wsteczny osiąga prawie stałą wartość, którą można nazwać prądem nasycenia. Dzieje się tak, ponieważ liczba przewoźników mniejszościowych jest ograniczona. Wraz ze wzrostem temperatury ich stężenie wzrasta i prąd wsteczny wzrasta, a rezystancja wsteczna maleje. Rozważmy bardziej szczegółowo, jak ustawia się prąd wsteczny, gdy włączone jest napięcie wsteczne. Po pierwsze, istnieje przejściowy proces związany z ruchem głównych nośników. Elektrony w regionie p poruszają się w kierunku dodatniego bieguna źródła, tj. oddalają się od przejścia p-p. A w regionie p, oddalając się od złącza p-n, poruszają się dziury. Na elektrodzie ujemnej rekombinują z elektronami pochodzącymi z drutu łączącego tę elektrodę z ujemnym biegunem źródła. Ponieważ elektrony opuszczają obszar n, staje się on naładowany dodatnio, ponieważ pozostają w nim dodatnio naładowane atomy zanieczyszczenia donorowego. Podobnie obszar p zostaje naładowany ujemnie, jego dziury są wypełnione przychodzącymi elektronami i pozostają w nim ujemnie naładowane atomy domieszek akceptorowych. Rozważany ruch głównych nośników w przeciwnych kierunkach trwa tylko przez krótki czas. Ten przejściowy prąd jest podobny do prądu ładowania kondensatora. Po obu stronach złącza p-n powstają dwa przeciwstawne ładunki kosmiczne, a cały układ staje się podobny do naładowanego kondensatora o złym dielektryku, w którym występuje prąd upływu (jego rolę odgrywa prąd wsteczny). Ale prąd upływu kondensatora, zgodnie z prawem Ohma, jest proporcjonalny do przyłożonego napięcia, a prąd wsteczny złącza p-n zależy stosunkowo mało od napięcia. 13. NAPIĘCIOWE CHARAKTERYSTYKI DIODY PÓŁPRZEWODNIKOWEJ W przypadku każdego urządzenia elektrycznego ważna jest zależność między prądem płynącym przez urządzenie a przyłożonym napięciem. Znając tę zależność, można określić prąd przy danym napięciu lub odwrotnie, napięcie odpowiadające danemu prądowi. Jeżeli rezystancja urządzenia jest stała, niezależna od prądu lub napięcia, wyraża to prawo Ohma: i= u/R lub i= Gu. Prąd jest wprost proporcjonalny do napięcia. Współczynnik proporcjonalności to przewodnictwo G=1/R. Wykres zależności między prądem a napięciem nazywany jest „charakterystyka napięciowa” tego urządzenia. Dla urządzenia, które jest zgodne z prawem Ohma, cechą charakterystyczną jest linia prosta przechodząca przez początek. Urządzenia, które są zgodne z prawem Ohma i mają charakterystykę prądowo-napięciową w postaci linii prostej przechodzącej przez źródło, nazywane są liniowymi. Istnieją również urządzenia, w których rezystancja nie jest stała, ale zależy od napięcia lub prądu. W przypadku takich urządzeń zależność między prądem a napięciem nie jest wyrażona prawem Ohma, ale w sposób bardziej złożony, a charakterystyka prądowo-napięciowa nie jest linią prostą. Te urządzenia nazywają się nieliniowy. Połączenie elektron-dziura jest zasadniczo diodą półprzewodnikową. Prąd wsteczny szybko rośnie, gdy początkowo napięcie wsteczne rośnie. Wynika to z faktu, że już przy niewielkim napięciu wstecznym, ze względu na wzrost bariery potencjału w złączu, prąd dyfuzyjny, który jest skierowany przeciwnie do prądu przewodzenia, gwałtownie maleje. W konsekwencji całkowity prąd gwałtownie wzrasta. Jednak wraz z dalszym wzrostem napięcia wstecznego prąd nieznacznie wzrasta, czyli zachodzi zjawisko przypominające nasycenie. Wzrost prądu następuje na skutek nagrzewania się złącza przez prąd, na skutek upływu na powierzchni, a także na skutek lawinowego zwielokrotnienia nośników ładunku, czyli wzrostu liczby nośników ładunku w wyniku jonizacji uderzeniowej . Zjawisko to polega na tym, że przy wyższym napięciu wstecznym elektrony nabierają większej prędkości i uderzając w atomy sieci krystalicznej wybijają z nich nowe elektrony, które z kolei są przyspieszane przez pole, a także wybijają elektrony z atomy. Proces ten nasila się wraz ze wzrostem napięcia. Przy określonej wartości napięcia wstecznego, awaria złącze pn, w którym prąd wsteczny gwałtownie wzrasta, a rezystancja warstwy barierowej gwałtownie spada. Konieczne jest rozróżnienie przebicia elektrycznego i termicznego złącza pn. Przebicie elektryczne jest odwracalne, jeśli podczas tego przebicia nie zachodzą w złączu nieodwracalne zmiany (zniszczenie struktury substancji). Dlatego działanie diody w trybie przebicia elektrycznego jest dopuszczalne. Mogą występować dwa rodzaje awarii elektrycznych, które często sobie towarzyszą: lawina и tunel. Załamanie lawinowe tłumaczy się rozważanym mnożeniem lawinowym nośnika z powodu jonizacji uderzeniowej. Ten rozkład jest typowy dla złącz pn o dużej grubości, otrzymywanych przy stosunkowo niskim stężeniu zanieczyszczeń w półprzewodnikach. Napięcie przebicia w przypadku przebicia lawinowego wynosi zwykle dziesiątki lub setki woltów. Awarię tunelowania tłumaczy się bardzo ciekawym zjawiskiem efektu tunelowania. Jego istota polega na tym, że przy wystarczająco silnym polu o sile ponad 105 V / cm, działającym w złączu p-g o małej grubości, niektóre elektrony przenikają przez złącze bez zmiany ich energii. Cienkie przejścia, w których możliwy jest efekt tunelowania, uzyskuje się przy wysokim stężeniu zanieczyszczeń. Napięcie przebicia odpowiadające przebiciu tunelu zwykle nie przekracza kilku woltów. 14. POJEMNOŚĆ DIODY PÓŁPRZEWODNIKOWEJ Złącze P-n przy napięciu wstecznym jest podobne do kondensatora ze znacznym upływem w dielektryku. Warstwa blokująca ma bardzo dużą rezystancję, a po obu jej stronach znajdują się dwa przeciwstawne ładunki kosmiczne tworzone przez zjonizowane atomy zanieczyszczeń donorowych i akceptorowych. Dlatego złącze pn ma pojemność podobną do pojemności kondensatora z dwiema płytkami. Ten pojemnik nazywa się pojemność bariery. Pojemność bariery, podobnie jak pojemność konwencjonalnych kondensatorów, wzrasta wraz ze wzrostem powierzchni złącza pn i stałej dielektrycznej substancji półprzewodnikowej oraz ze spadkiem grubości warstwy barierowej. Cechą pojemności bariery jest to, że jest to pojemność nieliniowa, tj. zmienia się wraz ze zmianą napięcia na złączu. Jeśli napięcie wsteczne wzrasta, zwiększa się grubość warstwy barierowej. A ponieważ ta warstwa pełni rolę dielektryka, zmniejsza się pojemność bariery. Pojemność bariery jest szkodliwa dla prostowania prądu przemiennego, ponieważ bocznikuje diodę i przepływa przez nią prąd przemienny z wyższymi częstotliwościami. Ale jednocześnie istnieje również pożyteczne zastosowanie pojemności bariery. Specjalne diody zwane varicaps, stosowane jako kondensatory zmienne do strojenia obwodów oscylacyjnych, a także w niektórych obwodach, których działanie opiera się na wykorzystaniu pojemności nieliniowej. W przeciwieństwie do konwencjonalnych kondensatorów zmiennych, w których zmiana pojemności następuje mechanicznie, w przypadku varicaps zmiana ta jest osiągana poprzez regulację wielkości napięcia wstecznego. Nazywa się metoda strojenia obwodów oscylacyjnych za pomocą varicapów ustawienie elektroniczne. Przy napięciu przewodzenia dioda oprócz pojemności barierowej ma tzw. pojemność dyfuzyjną, która również jest nieliniowa i rośnie wraz ze wzrostem napięcia przewodzenia. Pojemność dyfuzyjna charakteryzuje akumulację ruchomych nośników ładunku w obszarach n i p w obecności napięcia przewodzenia na złączu. Istnieje tylko przy napięciu przewodzenia, kiedy nośniki ładunku dyfundują w dużych ilościach przez zmniejszoną barierę potencjału i bez czasu na rekombinację gromadzą się w obszarach n i p. Na przykład, jeśli w jakiejś diodzie obszar p jest emiterem, a obszar p jest bazą, to gdy napięcie przewodzenia zostanie przyłożone z obszaru p do obszaru p, duża liczba otworów pędzi przez złącze, a zatem ładunek dodatni. W tym samym czasie, pod działaniem źródła napięcia stałego, elektrony wchodzą do obszaru p z drutu obwodu zewnętrznego iw tym obszarze powstaje ładunek ujemny. Dziury i elektrony w regionie n nie mogą natychmiast rekombinować. Dlatego każda wartość napięcia przewodzenia odpowiada pewnej wartości dwóch równych przeciwnych ładunków zgromadzonych w obszarze n w wyniku dyfuzji nośników przez złącze. Pojemność dyfuzyjna jest znacznie większa niż pojemność bariery, ale w większości przypadków nie ma to znaczącego wpływu na pracę diody, a także nie może być stosowana, ponieważ jest zawsze bocznikowana przez niską rezystancję bezpośrednią samej diody . Z reguły znaczenie praktyczne ma tylko pojemność bariery. 15. ZASTOSOWANIE DIOD PÓŁPRZEWODNIKOWYCH DO PROSTOWANIA AC Prostowanie prądu przemiennego jest jednym z głównych procesów w elektronice radiowej. W prostowniku energia prądu przemiennego jest przekształcana w energię prądu stałego. Diody półprzewodnikowe dobrze przewodzą prąd w kierunku do przodu i słabo przewodzą w kierunku odwrotnym, dlatego głównym celem większości diod jest Prostowanie prądu przemiennego. W prostownikach transformator mocy podłączony do sieci elektrycznej zwykle służy jako zmienny generator emf do zasilania sprzętu elektronicznego. Zamiast transformatora czasami stosuje się autotransformator. W niektórych przypadkach prostownik zasilany jest z sieci transformatorowej. Rolę rezystora obciążenia, czyli odbiornika energii prądu stałego, w praktycznych obwodach pełnią te obwody lub urządzenia, które są zasilane przez prostownik. Podczas prostowania prądów o wysokiej częstotliwości, na przykład w stopniach detektora odbiorników radiowych, transformator wysokiej częstotliwości lub rezonansowy obwód oscylacyjny służy jako zmienny generator EMF, a specjalnie dołączony rezystor obciążenia ma dużą rezystancję. Zastosowanie kondensatora podwaja napięcie wsteczne w porównaniu do jego wartości w przypadku braku kondensatora. Bardzo niebezpieczne jest zwarcie obciążenia, do którego dochodzi w szczególności w przypadku awarii kondensatora filtra wygładzającego. Wtedy całe napięcie źródłowe zostanie przyłożone do diody, a prąd stanie się niedopuszczalny. dziać się przebicie termiczne diody. Zaletą diod półprzewodnikowych w porównaniu z próżniowymi jest nie tylko brak nagrzewania katody, ale także niewielki spadek napięcia na diodzie przy prądzie stałym. Niezależnie od wielkości prądu, tj. mocy, dla której zaprojektowana jest dioda półprzewodnikowa, napięcie przewodzenia na nim wynosi dziesiąte części wolta lub nieco więcej niż 1 V. Dlatego sprawność prostowników z diodami półprzewodnikowymi jest wyższa niż z diodami próżniowymi. Przy prostowaniu wyższych napięć sprawność wzrasta, ponieważ w tym przypadku spadek napięcia około 1V na samej diodzie nie jest znaczący. Dzięki temu diody półprzewodnikowe są bardziej ekonomiczne niż diody próżniowe i emitują mniej ciepła podczas pracy, co powoduje szkodliwe nagrzewanie się innych części znajdujących się w pobliżu. Ponadto diody półprzewodnikowe mają bardzo długą żywotność. Ale ich wadą jest stosunkowo niskie graniczne napięcie wsteczne nie większe niż setki woltów, podczas gdy w przypadku kenotronów wysokiego napięcia może wynosić nawet kilkadziesiąt kilowoltów. Diody półprzewodnikowe mogą być stosowane w dowolnych obwodach prostownikowych. Jeżeli filtr wygładzający prostownik startuje z dużym kondensatorem, to po włączeniu napięcia zmiennego pojawia się impuls prądowy ładujący kondensator, często przekraczający dopuszczalną wartość prądu przewodzenia tej diody. Dlatego, aby zmniejszyć ten prąd, czasami rezystor ograniczający o rezystancji rzędu jednostek lub dziesiątek omów jest czasami połączony szeregowo z diodą. W diodach półprzewodnikowych pracujących w trybie prostownikowym przy odwróceniu polaryzacji napięcia można zaobserwować znaczne impulsy prądu wstecznego. Te impulsy powstają z dwóch powodów. Najpierw pod wpływem napięcia wstecznego uzyskuje się impuls prądowy, który ładuje pojemność bariery złącza pn. Im większa ta pojemność, tym większy pęd. Po drugie, pod napięciem wstecznym, nośniki mniejszościowe zgromadzone w obszarach n i p są rozpraszane. W praktyce, ze względu na różnicę stężeń zanieczyszczeń w tych regionach, główną rolę odgrywa większy ładunek nagromadzony w jednym z regionów. 16. INFORMACJE OGÓLNE O TRANZYSTORACH Wśród urządzeń półprzewodnikowych przetwarzających elektrycznie, czyli urządzeń służących do przetwarzania wielkości elektrycznych, ważne miejsce zajmują tranzystory. Są to urządzenia półprzewodnikowe odpowiednie do wzmacniania mocy i posiadają trzy lub więcej zacisków. Tranzystory mogą mieć różną liczbę przejść między regionami o różnej przewodności elektrycznej. Najpopularniejsze tranzystory z dwoma przejściami pn. Te tranzystory nazywają się dwubiegunowy, ponieważ ich praca opiera się na wykorzystaniu nośników ładunku obu znaków. Pierwsze tranzystory były typu punktowego, ale nie były wystarczająco stabilne. Obecnie produkowane i używane wyłącznie planarny tranzystory. Tranzystor bipolarny planarny to płyta z germanu lub innego półprzewodnika, w której powstają trzy obszary o różnej przewodności elektrycznej. Środkowy obszar tranzystora nazywany jest bazą, jeden skrajny obszar to emiter, drugi to kolektor. Tak więc tranzystor ma dwa złącza pn - złącze emiterowe między emiterem a bazą oraz złącze kolektorowe między podstawą a kolektorem. Odległość między nimi powinna być bardzo mała, nie większa niż kilka mikronów, tj. powierzchnia podstawy powinna być bardzo cienka. Jest to najważniejszy warunek dobrej pracy tranzystora. Ponadto zwykle stężenie zanieczyszczeń w bazie jest znacznie mniejsze niż w kolektorze i emiterze. Za pomocą metalowych elektrod z podstawy, emitera i kolektora wyciąga się wnioski. ( Tranzystor może pracować w trzech trybach, w zależności od tego, jakie napięcia występują na jego złączach. Pracę w trybie aktywnym uzyskuje się, gdy na złączu emitera jest napięcie stałe, a na złączu kolektora odwrotne. Tryb odcięcia lub blokowania uzyskuje się przez przyłożenie napięcia wstecznego do obu przejść. Jeśli napięcie jest stałe na obu złączach, tranzystor pracuje w trybie nasycenia. Tryb aktywny jest głównym. W szczególności jest stosowany w większości wzmacniaczy i oscylatorów. W praktycznych obwodach z tranzystorami zwykle powstają dwa obwody. Obwód wejściowy lub sterujący służy do sterowania działaniem tranzystora. W obwodzie wyjściowym lub sterowanym uzyskuje się wzmocnione oscylacje. Źródło wzmocnionych oscylacji znajduje się w obwodzie wejściowym, a obciążenie jest zawarte w obwodzie wyjściowym. Zależności między prądami i napięciami w tranzystorach wyraża się ich charakterystykami statycznymi, tj. charakterystykami pobieranymi przy prądzie stałym i przy braku obciążenia w obwodzie wyjściowym. Charakterystyka wejściowa i wyjściowa tranzystora jest ściśle związana z charakterystyką prądowo-napięciową diody półprzewodnikowej. Specyfikacje wejściowe odnoszą się do złącza nadajnika, które działa przy napięciu przewodzenia. Dlatego są one podobne do charakterystyki prądu wstecznego diody. Charakterystyki wyjściowe są podobne do charakterystyki prądu wstecznego diody, ponieważ odzwierciedlają właściwości złącza kolektora działającego przy napięciu wstecznym. Istnieją również charakterystyki sprzężenia zwrotnego, które pokazują, jak zmienia się napięcie na wejściu tranzystora pod wpływem zmiany napięcia wyjściowego, pod warunkiem, że prąd wejściowy jest stały. 17. PROCESY FIZYCZNE W TRANZYSTORZE Zastanów się, jak tranzystor działa w trybie statycznym bez obciążenia, gdy włączone są tylko źródła stałego napięcia zasilania. Ich polaryzacja jest taka, że napięcie na złączu emitera jest stałe, a na złączu kolektora jest odwrócone. Dlatego rezystancja złącza emiterowego jest niewielka, a do uzyskania normalnego prądu w tym złączu wystarczy źródło o napięciu rzędu dziesiątych części wolta. Rezystancja złącza kolektora jest wysoka, a napięcie to zwykle jednostki lub dziesiątki woltów. Zasada działania tranzystora jest to, że napięcie przewodzenia złącza emitera znacząco wpływa na prąd kolektora: im wyższe napięcie, tym większe prądy emitera i kolektora. W tym przypadku zmiana prądu kolektora jest tylko nieznacznie mniejsza niż zmiana prądu emitera. W ten sposób napięcie wejściowe steruje prądem kolektora. Wzmocnienie oscylacji elektrycznych za pomocą tranzystora opiera się właśnie na tym zjawisku. Procesy fizyczne w tranzystorze zachodzą w następujący sposób. Wraz ze wzrostem bezpośredniego napięcia wejściowego zmniejsza się bariera potencjału w złączu emitera i odpowiednio wzrasta prąd płynący przez to złącze - prąd emitera. Elektrony tego prądu są wtryskiwane z emitera do bazy i dzięki zjawisku dyfuzji przenikają przez bazę w rejon złącza kolektora, zwiększając prąd kolektora. Ponieważ złącze kolektora działa przy napięciu wstecznym, w obszarze tego złącza uzyskuje się ładunki przestrzenne. Pomiędzy nimi jest pole elektryczne. Wspomaga przejście elektronów, które przybyły tutaj z emitera przez złącze kolektora, czyli przyciąga elektrony w obszar złącza kolektora. Jeśli grubość podstawy jest wystarczająco mała, a koncentracja w niej dziur jest niska, to większość elektronów po przejściu przez podstawę nie ma czasu na ponowne połączenie z otworami podstawy i dotarcie do złącza kolektora. Tylko niewielka część elektronów rekombinuje z dziurami w podstawie. W wyniku tej rekombinacji w przewodzie podstawowym płynie prąd bazy. W wyniku rekombinacji co sekundę znika pewna liczba dziur, ale w każdej sekundzie pojawia się ta sama liczba nowych dziur z powodu tej samej liczby elektronów opuszczających podstawę w kierunku bieguna źródłowego. W bazie nie może być akumulacji dużej liczby elektronów. Prąd bazowy jest bezużyteczny, a nawet szkodliwy. Pożądane jest, aby prąd podstawowy był jak najmniejszy. Aby to zrobić, baza jest bardzo cienka, a koncentracja w niej zanieczyszczeń, która determinuje koncentrację dziur, jest zmniejszona. W tych warunkach mniejsza liczba elektronów będzie rekombinować w podstawie z dziurami. Nazwa „emiter” nadana jednej z elektrod podkreśla, że elektrony niejako emitują z tej elektrody do podstawy. W rzeczywistości nie jest to emisja, ale wstrzykiwanie elektronów z emitera do podstawy. Użycie tego terminu jest konieczne, aby odróżnić to zjawisko od emisji elektronów, która powoduje wytwarzanie elektronów w próżni lub rozrzedzonym gazie. Emiter należy nazwać regionem tranzystora, którego celem jest wprowadzenie nośników ładunku do bazy. Kolektor to obszar, którego celem jest wydobycie nośników ładunku z bazy. Podstawą jest region, do którego emiter wstrzykuje mniejsze nośniki ładunku dla tego regionu. Emiter i kolektor można zamienić. Ale w tranzystorach z reguły złącze kolektora ma znacznie większy obszar niż złącze emitera, ponieważ moc rozpraszana w złączu kolektora jest znacznie większa niż w złączu emitera. 18. PODSTAWOWE SCHEMATY WŁĄCZANIA TRANZYSTORÓW Zastosować trzy główne schematy włączenie tranzystorów do kaskad wzmacniających lub innych. W tych obwodach jedna z elektrod tranzystora jest wspólnym punktem wejścia i wyjścia ze sceny. Podstawowe obwody do przełączania tranzystorów nazywane są odpowiednio obwodami ze wspólnym emiterem, wspólną podstawą i wspólnym kolektorem. Obwód wspólnego emitera jest najczęstszy, ponieważ zapewnia największy zysk mocy. Wzmocnienie prądowe takiego stopnia jest stosunkiem amplitud prądów przemiennych wyjściowych lub wejściowych, czyli składowych zmiennych prądów kolektora i bazy. Ponieważ prąd kolektora jest dziesiątki razy większy niż prąd bazy, wzmocnienie prądowe jest rzędu dziesiątek. Wzmacniające właściwości tranzystora, gdy jest on włączony zgodnie z obwodem ze wspólnym emiterem, charakteryzują się jednym z jego głównych parametrów - wzmocnieniem prądu statycznego dla obwodu ze wspólnym emiterem. Ponieważ powinien charakteryzować tylko sam tranzystor, wyznacza się go w stanie bez obciążenia, czyli przy stałym napięciu kolektor-emiter. Wzmocnienie napięciowe kaskady jest równe stosunkowi amplitud wyjściowego i wejściowego napięcia przemiennego. Wejście to napięcie baza-emiter, a wyjście to napięcie przemienne na rezystorze obciążenia lub między kolektorem a emiterem. Układ ze wspólną podstawą daje znacznie mniejsze wzmocnienie mocy i ma jeszcze niższą impedancję wejściową niż układ ze wspólnym emiterem, ale jest dość często stosowany, ponieważ jest znacznie lepszy od układu ze wspólnym emiterem pod względem właściwości częstotliwościowych i temperaturowych. Bieżące wzmocnienie sceny ze wspólną podstawą jest zawsze nieco mniejsze niż jedność. Wynika to z faktu, że prąd kolektora jest zawsze tylko nieznacznie mniejszy niż prąd emitera. Najważniejszym parametrem tranzystorów jest wzmocnienie prądu statycznego dla obwodu ze wspólną bazą. Wyznacza się go dla stanu bez obciążenia, czyli przy stałym napięciu „kolektor – baza”. W przypadku obwodu ze wspólną podstawą nie ma przesunięcia fazowego między napięciem wyjściowym a wejściowym, tj. faza napięcia nie odwraca się podczas wzmacniania. Schemat ze wspólnym kolektorem. Rzeczywiście, kolektor jest w nim wspólnym punktem wejścia i wyjścia, ponieważ zasilacze są zawsze bocznikowane dużymi kondensatorami, a prąd przemienny można uznać za zwarcie. Osobliwością tego obwodu jest to, że napięcie wejściowe jest całkowicie przenoszone z powrotem na wejście, tj. występuje bardzo silne ujemne sprzężenie zwrotne. Napięcie wejściowe jest równe sumie napięcia przemiennego baza-emiter i napięcia wyjściowego. Wzmocnienie prądowe kaskady ze wspólnym kolektorem jest prawie takie samo jak w obwodzie ze wspólnym emiterem, tj. ma wartość rzędu dziesiątek. Wzmocnienie napięcia jest bliskie jedności, ale zawsze mniejsze. Napięcie wyjściowe jest w fazie z napięciem wejściowym i jest prawie równe jego wielkości. Oznacza to, że napięcie wyjściowe powtarza wejście. 19. WŁAŚCIWOŚCI CZĘSTOTLIWOŚCI TRANZYSTORÓW Wraz ze wzrostem częstotliwości zmniejsza się wzmocnienie zapewniane przez tranzystory. Istnieją dwie główne przyczyny tego zjawiska. Po pierwsze, przy wyższych częstotliwościach szkodzi to pojemność złącza kolektora. Przy niskich częstotliwościach rezystancja pojemności jest bardzo duża, rezystancja kolektora jest również bardzo duża i można uznać, że cały prąd trafia do rezystora obciążenia. Ale przy pewnej wysokiej częstotliwości rezystancja pojemności staje się stosunkowo mała i zauważalna część prądu wytwarzanego przez generator rozgałęzia się do niego, a prąd w rezystorze odpowiednio się zmniejsza. W konsekwencji napięcie wyjściowe i moc wyjściowa są zmniejszone. Pojemność złącza nadajnika również zmniejsza jego rezystancję wraz ze wzrostem częstotliwości, ale zawsze jest bocznikowana przez niską rezystancję złącza nadajnika i dlatego jego szkodliwy wpływ może wystąpić tylko przy bardzo wysokich częstotliwościach. W praktyce, przy niższych częstotliwościach, pojemność, która jest bocznikowana przez bardzo dużą rezystancję złącza kolektora, ma już tak silny wpływ, że działanie tranzystora, na który może mieć wpływ pojemność, staje się niepraktyczne. Dlatego efekt pojemności w większości przypadków można zignorować. Drugim powodem spadku wzmocnienia przy wyższych częstotliwościach jest Opóźnienie fazy AC kolektor z emitera prądu przemiennego. Jest to spowodowane bezwładnością procesu przemieszczania się nośników przez podstawę od złącza emiterowego do złącza kolektora, a także bezwładnością procesów akumulacji i rozpraszania ładunku w podłożu. Nośniki, takie jak elektrony w tranzystorze typu npn, wykonują ruch dyfuzyjny w bazie i dlatego ich prędkość nie jest bardzo duża. Czas przejścia nośników przez bazę w konwencjonalnych tranzystorach jest rzędu 10-7 s, czyli 0,1 μs lub mniej. Oczywiście czas ten jest bardzo krótki, ale przy częstotliwościach rzędu jednostek i kilkudziesięciu megaherców i wyższych powoduje zauważalne przesunięcie fazowe między prądami kolektora i emitera. Z powodu tego przesunięcia fazowego przy wysokich częstotliwościach, podstawowy prąd przemienny wzrasta, a to zmniejsza wzmocnienie prądowe. Oznaczmy wzmocnienie prądowe dla obwodu ze wspólnym emiterem i wzmocnienie prądowe dla obwodu o wspólnej podstawie b. Wraz ze wzrostem częstotliwości v maleje znacznie bardziej niż b. Współczynnik b zmniejsza się pod wpływem pojemności, a na wartość c wpływa również przesunięcie fazowe między prądami kolektora i emitera, spowodowane czasem przemieszczania się nośników przez bazę. Obwód ze wspólnym emiterem, w porównaniu z obwodem o wspólnej podstawie, ma znacznie gorsze właściwości częstotliwościowe. Zwyczajowo bierze się pod uwagę maksymalny dopuszczalny spadek wartości bic o 30% w porównaniu z ich wartościami przy niskich częstotliwościach. Częstotliwości, przy których uzyskuje się taki spadek wzmocnienia, nazywane są częstotliwościami granicznymi wzmocnienia dla obwodów o wspólnej podstawie i wspólnym emiterze. Oprócz ograniczających częstotliwości wzmocnienia, tranzystor charakteryzuje się również maksymalną częstotliwością generowania, przy której kaskadowe wzmocnienie mocy spada do 1. Przy wysokich częstotliwościach zmieniają się nie tylko wartości i c. Pod wpływem pojemności złączy i czasu przejścia nośnika przez bazę, a także procesów akumulacji i rozpraszania ładunków w bazie, parametry wewnętrzne tranzystora przy wysokich częstotliwościach zmieniają swoją wartość i przestają być rezystancjami czysto czynnymi. Zmieniają się również wszystkie inne parametry. Wyższe częstotliwości odcięcia można uzyskać stosując półprzewodniki o większej ruchliwości nośnej. 20. TRYB IMPULSOWY TRANZYSTORÓW Tranzystory, podobnie jak diody półprzewodnikowe, są używane w różnych urządzeniach impulsowych. Działanie tranzystorów w trybie impulsowym, inaczej zwanym trybem kluczykowym lub przełączającym, ma szereg cech. Rozważać tryb impulsowy tranzystor wykorzystujący jego charakterystykę wyjściową dla obwodu wspólnego emitera. Niech rezystor obciążenia zostanie włączony do obwodu kolektora. Zwykle, zanim na wejście tranzystora otrzyma impuls prądu wejściowego lub napięcia wejściowego, tranzystor jest w stanie wyłączonym. W obwodzie kolektora płynie mały prąd, dlatego obwód ten można w przybliżeniu uznać za otwarty. Napięcie źródła jest prawie całkowicie przyłożone do tranzystora. Jeśli na wejście zostanie podany impuls prądowy o maksymalnej wartości, tranzystor przechodzi w obszar nasycenia. Okazuje się, że impuls prądu kolektora ma wartość maksymalną. Czasami określany jest jako prąd nasycenia. W tym trybie tranzystor działa jak zamknięty klucz i prawie całe napięcie źródła spada na rezystorze, a tranzystor ma tylko bardzo małe napięcie szczątkowe rzędu dziesięciu ułamków wolta, powszechnie nazywane napięcie nasycenia. Jeśli impuls prądu wejściowego jest mniejszy niż wartość maksymalna, wówczas impuls prądu kolektora również zmniejszy się. Ale z drugiej strony wzrost impulsu prądu podstawowego powyżej wartości maksymalnej nie powoduje już wzrostu impulsu prądu wyjściowego. Tryb impulsowy charakteryzuje się również wzmocnieniem prądowym, które w odróżnieniu od in określane jest nie przez przyrost prądów, ale jako stosunek prądów odpowiadający trybowi nasycenia. Innymi słowy, β jest parametrem charakteryzującym wzmocnienie małych sygnałów, a wzmocnienie prądowe odnosi się do wzmocnienia dużych sygnałów, w szczególności impulsów, i różni się nieco od β wielkością. Parametrem trybu impulsowego tranzystora jest również jego rezystancja nasycenia. Wartość rezystancji nasycenia dla tranzystorów zaprojektowanych do pracy impulsowej jest zwykle rzędu jednostek, czasem kilkudziesięciu omów. Podobnie jak rozważany układ ze wspólnym emiterem, układ ze wspólną podstawą również pracuje w trybie impulsowym. Jeżeli czas trwania impulsu wejściowego jest wielokrotnie dłuższy niż czas przejściowych procesów gromadzenia i rozpraszania ładunków w bazie tranzystora, to impuls prądu wyjściowego będzie miał prawie taki sam czas trwania i kształt jak impuls wejściowy. Ale przy krótkich impulsach można zaobserwować znaczne zniekształcenie kształtu impulsu prądu wyjściowego i wzrost jego czasu trwania. Stopniowy wzrost prądu związany jest z procesem akumulacji nośników w bazie. Ponadto nośniki wstrzykiwane do podstawy na początku impulsu prądu wejściowego mają różne szybkości ruchu dyfuzyjnego i nie wszystkie od razu docierają do kolektora. Po zakończeniu impulsu wejściowego w wyniku procesu rozpraszania ładunku nagromadzonego w bazie, prąd utrzymuje się przez pewien czas, a następnie stopniowo maleje w czasie zaniku. W konsekwencji proces włączania i wyłączania obwodu kolektora ulega spowolnieniu, opóźnia się czas, w którym znajduje się on w stanie zamkniętym. Innymi słowy, ze względu na bezwładność procesów akumulacji i rozpraszania ładunku w bazie, tranzystor nie może wykonać wystarczająco szybkiego włączania i wyłączania, czyli nie zapewnia wystarczającej szybkości dla trybu przełączania. 21. GŁÓWNE TYPY TRANZYSTORÓW Istniejące typy tranzystorów są klasyfikowane zgodnie z metodą produkcji, użytymi materiałami, cechami działania, przeznaczeniem, mocą, zakresem częstotliwości pracy i innymi cechami. Tranzystory punktowe, historycznie pierwsze, nie są już używane. Rozważać tranzystory planarne. Jako półprzewodniki do tranzystorów produkowanych przez przemysł stosuje się german i krzem. Zgodnie z maksymalną mocą uwalnianą w złączu kolektora istnieją tranzystory małej, średniej i dużej mocy. W zależności od granicznej częstotliwości roboczej tranzystory są niskiej częstotliwości (do 3 MHz), średniej częstotliwości (od 3 do 30 MHz) i wysokiej częstotliwości (powyżej 30 MHz). W przypadku ogromnej większości tranzystorów głównym procesem fizycznym jest wtrysk nośnika, ale istnieje grupa tranzystorów, które działają bez wtrysku. Należą do nich w szczególności tranzystory polowe (kanałowe). Tranzystory wtryskowe mogą mieć różną liczbę złączy pn. Wyjątkowo rozpowszechnione są tranzystory bipolarne z dwoma złączami pn. Istnieją dwa rodzaje takich tranzystorów: dryfowy, w którym przenoszenie drobnych nośników ładunku przez bazę odbywa się głównie przez dryft, tj. Pod działaniem przyspieszającego pola elektrycznego, oraz bezdryfowy, w którym takie przeniesienie odbywa się głównie przez dyfuzję. Tranzystory bez dryftu mają takie samo stężenie zanieczyszczeń w całej objętości podstawowej. Dzięki temu w podstawie nie powstaje pole elektryczne, a znajdujące się w nim nośniki wykonują ruch dyfuzyjny od emitera do kolektora. Prędkość takiego ruchu jest mniejsza niż prędkość dryfu nośnika w polu przyspieszającym. Dlatego tranzystory bezdryfowe są zaprojektowane dla niższych częstotliwości niż te z dryftem. W tranzystorach dryfujących pole elektryczne w bazie przyspiesza nośniki mniejszościowe, gdy zbliżają się one do kolektora. W związku z tym wzrasta częstotliwość graniczna i wzmocnienie prądowe. Najczęściej pole elektryczne w podłożu powstaje w wyniku nierównomiernego stężenia zanieczyszczeń w masie podłoża, co można osiągnąć metodą dyfuzyjną wytwarzania złączy pn. Tranzystory wykonane w ten sposób nazywane są dyfuzja. Tranzystory bezdryfowe większość ma złącza stopowe uzyskane przy użyciu technologii podobnej do diod. Tranzystory te nazywane są tranzystorami stopowymi. Zanieczyszczenia są wtapiane w główną płytę półprzewodnikową z obu stron, tworząc regiony emitera i kolektora. Ponieważ złącze kolektora rozprasza więcej mocy, jest zwykle znacznie większe niż złącze emitera. Można jednak również wykonać symetryczne tranzystory ze stopów, w których oba złącza są takie same. Tranzystory dryfowe są wytwarzane przy częstotliwościach granicznych dziesięciokrotnie wyższych niż w przypadku tranzystorów ze stopów. Pod działaniem przyspieszającego pola nośniki poruszają się w bazie znacznie szybciej. W produkcji tranzystorów dryfowych stosuje się metodę dyfuzyjną, w której podstawa może być bardzo cienka. Przejście kolektora okazuje się gładkie i wtedy jego pojemność jest znacznie mniejsza niż w przypadku przejść stopowych. Ze względu na niewielką grubość podstawy wzmocnienia bi c są znacznie większe niż w przypadku tranzystorów stopowych. Metoda dyfuzyjna umożliwia dokładniejsze wytwarzanie tranzystorów przy mniejszym rozkładzie parametrów i charakterystyk. 22. INFORMACJE OGÓLNE O URZĄDZENIACH ELEKTROPRÓŻNIOWYCH I ZASADACH ICH KLASYFIKACJI Urządzenia elektropróżniowe są szeroko stosowane. Za pomocą tych urządzeń można zamienić energię elektryczną jednego typu na energię elektryczną innego typu, różniącą się kształtem, wielkością i częstotliwością prądu lub napięcia, a także energię promieniowania na energię elektryczną i odwrotnie. Za pomocą urządzenia elektropróżniowe możliwa jest regulacja różnych wielkości elektrycznych, świetlnych i innych płynnie lub krokowo, z dużą lub małą prędkością i przy niskich kosztach energii dla samego procesu regulacji, czyli bez znaczącego obniżenia sprawności, charakterystycznego dla wielu innych metod regulacji i kontroli. Te zalety urządzeń elektropróżniowych doprowadziły do ich zastosowania do prostowania, wzmacniania, generowania i konwersji częstotliwości różnych prądów elektrycznych, oscylografii zjawisk elektrycznych i nieelektrycznych, automatycznej kontroli i regulacji, transmisji i odbioru obrazów telewizyjnych, różnych pomiarów i innych procesów. Urządzenia elektropróżniowe to urządzenia, w których przestrzeń robocza, izolowana gazoszczelną osłoną, ma wysoki stopień rozrzedzenia lub jest wypełniona specjalnym medium (oparami lub gazami) i których działanie opiera się na wykorzystaniu zjawisk elektrycznych w próżni lub gaz. Urządzenia elektropróżniowe dzielą się na urządzenia elektroniczne, w których prąd czysto elektroniczny przepływa w próżni oraz urządzenia jonowe (wyładowanie gazowe), które charakteryzują się wyładowaniem elektrycznym w gazie lub parze. W urządzeniach elektronicznych jonizacja praktycznie nie występuje, a jeśli jest obserwowana w niewielkim stopniu, nie ma zauważalnego wpływu na działanie tych urządzeń. Rozrzedzenie gazu w tych urządzeniach szacuje się na podstawie ciśnienia gazów resztkowych poniżej 10-6 mm Hg. Art., charakterystyczny dla wysokiej próżni. W urządzeniach jonowych ciśnienie gazów resztkowych wynosi 10-3 mm Hg. Sztuka. i wyżej. Przy takim ciśnieniu znaczna część poruszających się elektronów zderza się z cząsteczkami gazu, prowadząc do jonizacji, a zatem w tych urządzeniach zachodzą procesy elektronowo-jonowe. Działanie przewodzących (niewyładowczych) urządzeń elektropróżniowych opiera się na wykorzystaniu zjawisk związanych z prądem elektrycznym w przewodnikach stałych lub ciekłych w rozrzedzonym gazie. W tych urządzeniach nie ma wyładowań elektrycznych w gazie ani w próżni. Urządzenia elektrovacuum są podzielone według różnych kryteriów. Specjalną grupę tworzą lampy próżniowe, czyli urządzenia elektroniczne przeznaczone do różnych konwersji wielkości elektrycznych. Zgodnie z przeznaczeniem lampy te są generatorem, wzmacniaczem, prostownikiem, przetwornicą częstotliwości, detektorem, pomiarem itp. Większość z nich jest zaprojektowana do pracy w trybie ciągłym, ale wytwarzają również lampy w trybie impulsowym. Tworzą impulsy elektryczne, czyli prądy krótkotrwałe, pod warunkiem, że czas trwania impulsów jest znacznie krótszy niż odstępy między impulsami. Urządzenia elektropróżniowe są również klasyfikowane według wielu innych kryteriów: rodzaju katody (gorąca lub zimna), konstrukcji cylindra (szklany, metalowy, ceramiczny lub kombinowany), rodzaju chłodzenia (naturalne, tj. promienne, wymuszone) powietrze woda). 23. URZĄDZENIE I ZASADA DZIAŁANIA DIODY Głównym celem lampy dwuelektrodowej, zwanej diodą, jest Prostowanie prądu przemiennego. Dioda posiada dwie metalowe elektrody w szklanej, metalowej lub ceramicznej butelce próżniowej. Jedna elektroda to podgrzewana katoda, która służy do emitowania elektronów. Druga elektroda, anoda, służy do przyciągania elektronów emitowanych przez katodę i tworzenia strumienia swobodnych elektronów. Katoda i anoda diody próżniowej są podobne do emitera i podstawy diody półprzewodnikowej. Anoda przyciąga elektrony, jeśli ma dodatni potencjał w stosunku do katody. W przestrzeni między anodą a katodą powstaje pole elektryczne, które przy dodatnim potencjale anody przyspiesza dla elektronów emitowanych przez katodę. Elektrony emitowane z katody poruszają się w kierunku anody pod wpływem pola. W najprostszym przypadku katoda wykonana jest w postaci drutu metalowego, który jest ogrzewany prądem. Z jego powierzchni emitowane są elektrony. Takie katody nazywane są katodami bezpośredniego i bezpośredniego ogrzewania. Również szeroko stosowany katody ogrzewania pośredniego, inaczej zwany ogrzewaniem. Ten typ katody posiada metalowy cylinder, którego powierzchnia pokryta jest warstwą aktywną emitującą elektrony. Wewnątrz cylindra znajduje się grzałka w postaci drutu podgrzewanego prądem. Pomiędzy anodą a katodą elektrony tworzą ujemny ładunek elektryczny rozłożony w przestrzeni, zwany wolumetrycznym lub przestrzennym i uniemożliwiający ruch elektronów do anody. Przy niewystarczająco dużym dodatnim potencjale anodowym nie wszystkie elektrony mogą przezwyciężyć opóźniający efekt ładunku kosmicznego, a niektóre z nich powracają do katody. Im wyższy potencjał anodowy, tym więcej elektronów pokonuje ładunek kosmiczny i trafia do anody, czyli tym większy prąd katody. W diodzie elektrony opuszczające katodę trafiają do anody. Nazywa się przepływ elektronów wlatujących wewnątrz lampy od katody do anody i padających na anodę prąd anodowy. Prąd anodowy jest głównym prądem lampy elektronowej. Elektrony prądu anodowego poruszają się wewnątrz lampy od katody do anody, a na zewnątrz lampy - od anody do plusa źródła anodowego, wewnątrz tego ostatniego - od jej plusa do minusa, a następnie od minusa źródła do katody lampy. Kiedy zmienia się dodatni potencjał anody, zmienia się prąd katody i równy jej prąd anodowy. Jest to elektrostatyczna zasada sterowania prądem anodowym. Jeśli potencjał anody jest ujemny w stosunku do katody, to pole między anodą a katodą opóźnia elektrony emitowane z katody. Elektrony te są hamowane pod wpływem pola i wracają do katody. W tym przypadku prądy katody i anody są równe zeru. Tak więc główną właściwością diody jest jej zdolność do przewodzenia prądu w jednym kierunku. Dioda ma przewodnictwo jednokierunkowe. Diody detektorowe małej mocy są produkowane z katodami żarzonymi pośrednio. Mają małe elektrody, są zaprojektowane dla małych prądów anodowych, małej mocy granicznej uwalnianej na anodzie i niskiego napięcia wstecznego. Diody detektorowe dla wysokich i ultrawysokich częstotliwości wykonane są z możliwie najmniejszą pojemnością. Mocniejsze diody (kenotrony) do prostowania prądu przemiennego sieci są produkowane z katodami zarówno bezpośredniego, jak i pośredniego nagrzewania i są przeznaczone do wyższego napięcia wstecznego. Powszechnie stosowane są diody podwójne, czyli dwie diody w jednym cylindrze. 24. TRIODA I JEJ OBWODY W przeciwieństwie do diod, triody mają trzecią elektrodę - siatka kontrolna, zwykle nazywana siatką prostą i znajduje się między anodą a katodą. Służy do elektrostatycznej kontroli prądu anodowego. Jeśli zmienisz potencjał siatki względem katody, zmieni się pole elektryczne, a w rezultacie zmieni się prąd katody lampy. To jest działanie kontrolne sieci. Katoda i anoda triod są takie same jak diod. Siatka w większości lamp wykonana jest z drutu otaczającego katodę. Katoda, siatka i anoda diody próżniowej są analogiczne odpowiednio do emitera, bazy i kolektora tranzystora bipolarnego lub źródła, bramki i drenu tranzystora polowego. Wszystko związane z siatką jest oznaczone literą „c”. Trioda ma obwody żarnika i anody podobne do diody oraz obwód siatki. W praktycznych obwodach rezystory i inne części są zawarte w obwodzie sieci. Różnica potencjałów między siatką a katodą jest napięciem sieciowym (napięciem sieciowym) i jest oznaczona Uc. W przypadku lampy z katodą z żarnikiem bezpośrednim napięcie siatki jest określane względem końca katody połączonego z biegunem ujemnym źródła anodowego. Przy dodatnim napięciu sieci część elektronów emitowanych przez katodę trafia na siatkę iw jej obwodzie powstaje prąd sieciowy (prąd sieciowy), oznaczony jako ic. Część triody, składająca się z katody, siatki i przestrzeni między nimi, jest podobna w swoich właściwościach do diody, a obwód siatki jest podobny do obwodu anodowego diody. Rolę anody w tej diodzie pełni siatka. Głównym i użytecznym prądem w triodzie jest prąd anodowy. Jest to analogiczne do prądu kolektora tranzystora bipolarnego lub prądu drenu tranzystora polowego. Prąd sieciowy, podobny do prądu bazy tranzystora, jest generalnie bezużyteczny, a nawet szkodliwy. Zwykle jest to znacznie mniej niż prąd anodowy. W wielu przypadkach dążą do tego, aby w ogóle nie było prądu sieciowego. W tym celu napięcie sieciowe musi być ujemne. Wtedy siatka odpycha elektrony, a prąd siatki jest praktycznie nieobecny. Zdarzają się przypadki, gdy triody pracują przy stosunkowo dużych dodatnich napięciach sieci, a wtedy prąd sieci jest znaczny. Możliwość pracy triody próżniowej bez szkodliwego działania siatki znacząco odróżnia ją od tranzystora bipolarnego, który nie może pracować bez prądu bazy. W drucie katodowym prądy anodowe i siatkowe płyną razem. Całkowity prąd jest tutaj prądem katodowym lub prądem katodowym i jest oznaczony ik; ic = ia + ic. Prąd katody jest podobny do prądu emitera tranzystora bipolarnego lub prądu źródła tranzystora polowego i jest określany przez całkowity przepływ elektronów poruszających się od katody w kierunku siatki. W diodzie prąd katodowy jest zawsze równy prądowi anodowemu, a w triodzie prądy te są równe tylko wtedy, gdy Uc < 0, ponieważ w tym przypadku ic = 0. W triodzie z bezpośrednio żarzoną katodą w obwodzie żarzenia, prąd katody rozgałęzia się na dwie części, które są dodawane algebraicznie z prądem żarzenia. Aby zmierzyć prąd katodowy w tym przypadku, należy włączyć miliamperomierz. Podobnie jak diody, triody przewodzą jednokierunkowo i mogą być używane do prostowania prądu przemiennego. Ale do tego nie ma sensu ich używać, ponieważ diody są prostsze w konstrukcji i tańsze. Możliwość sterowania prądem anodowym za pomocą siatki określa główny cel triod - wzmacnianie oscylacji elektrycznych. Triody są również wykorzystywane do generowania oscylacji elektrycznych o różnych częstotliwościach. Praca triod w generatorach i wielu innych obwodach specjalnych w większości przypadków sprowadza się do wzmacniania oscylacji. 25. KATODY PROSTE I ZŁOŻONE proste katody, tj. katody z czystego metalu, wykonane prawie wyłącznie z wolframu (rzadko tantalu) i bezpośrednio ogrzewane. Główną zaletą katody wolframowej jest stabilność jej emisji. Przy stałym żarzeniu emisja zmniejsza się tylko stopniowo w czasie życia katody. A przez krótkie okresy praktycznie nie ma zmian w emisji. Po chwilowym, niezbyt długim przegrzaniu, emisja nie maleje. Silne przegrzanie jest niebezpieczne, ponieważ katoda może się stopić. Długotrwałe przegrzewanie znacznie zmniejsza trwałość katody wolframowej. Zwiększenie napięcia żarnika tylko o 5% skraca żywotność 2 razy, obniżenie żarnika o 5%, wręcz przeciwnie, podwaja żywotność. Katoda wolframowa nie ulega zniszczeniu i nie zmniejsza emisji z uderzeń jonów. Odporność katody wolframowej na bombardowanie jonami sprawia, że jest ona szczególnie odpowiednia do lamp dużej mocy pracujących przy wysokich napięciach anodowych. Katody wolframowe są również stosowane w specjalnych lampach elektrometrycznych, w których ważna jest stałość emisji. W przypadku lamp z katodą wolframową odparowujące cząsteczki wolframu tworzą na powierzchni cylindra warstwę, która pochłania gazy i poprawia próżnię. Główną wadą katody wolframowej jest jej niska wydajność. Ze wszystkich katod jest najmniej ekonomiczna. Jego emisja jest stosunkowo niewielka. Ale z powodu wysokiej temperatury promienie ciepła i światła są intensywnie emitowane, na co prawie cała moc grzewcza jest bezużytecznie zużywana. To był impuls do stworzenia bardziej ekonomicznych złożonych katod. Katody złożone może mieć inne urządzenie, w. W wielu typach katod na powierzchni czystego metalu osadzana jest warstwa aktywująca, co zmniejsza funkcję pracy i umożliwia uzyskanie wysokiej emisji przy stosunkowo niskich temperaturach. Główną zaletą złożonych katod jest ich wydajność. Temperatura pracy dla niektórych typów katod wynosi 1000 K. Trwałość sięga tysięcy, a nawet dziesiątek tysięcy godzin. Pod koniec tego okresu następuje spadek emisji ze zmniejszenia ilości zanieczyszczeń aktywujących, np. na skutek ich parowania. Niektóre typy złożonych katod dają ultrawysoką emisję w trybie pulsacyjnym, tj. przez krótkie okresy czasu oddzielone od siebie znacznie dłuższymi przerwami. Główną wadą złożonych katod jest niska stabilność emisji. Te katody zmniejszają emisyjność podczas tymczasowego ogrzewania, co tłumaczy się parowaniem substancji aktywujących w podwyższonych temperaturach. Aby zmniejszyć możliwość jonizacji w lampach ze złożonymi katodami, ważne jest utrzymywanie bardzo wysokiej próżni. Osiąga się to dzięki zastosowaniu specjalnego pochłaniacza gazu. Złożone katody mogą być błoną i półprzewodnikiem. Stosowane są nowe typy katod: barowo-wolframowa, tlenek toru i wiele innych. Katody barowo-wolframowe umożliwiają ogrzewanie pośrednie. Na powierzchni porowatego wolframu tworzy się porowata warstwa aktywująca baru i strontu. Warstewka odparowująca jest uzupełniana dzięki dyfuzji atomów baru i strontu przez wolfram z tabletki tlenków tych metali. Ich zaletą jest odporność na bombardowanie elektronami i jonami. W tak zwanych katodach spiekanych tlenek osadza się na gąbce lub siatce niklowej. Rezystancja takiej katody jest znacznie zmniejszona i jest znacznie mniej podatna na zniekształcenia i występowanie gorących punktów. 26. KATODY CIEPŁA BEZPOŚREDNIEGO I POŚREDNIEGO Katody ogrzewane bezpośrednio to druty o przekroju okrągłym lub prostokątnym. Jego grubość waha się od 0,01 mm dla większości lamp o małej mocy do 1-2 mm dla lamp o dużej mocy. Krótkie katody są proste. Dłuższe są wygięte w linię łamaną. W urządzeniach jonowych katoda ma często postać solenoidu. Potężne katody tych urządzeń wykonane są z taśmy, zakrzywionego „akordeon” lub wzdłuż linii śrubowej. Zalety bezpośrednio żarzonych katod to prostota urządzenia i możliwość ich wykonania dla większości lamp o małej mocy w postaci cienkich żarników dla małego prądu żarnika. Katody ogrzewane bezpośrednio są stosowane w lampach generatorowych dużej mocy do przenośnych i mobilnych radiostacji małej mocy zasilanych suchymi bateriami lub bateriami, ponieważ w takich przypadkach ważne jest oszczędzanie energii ze źródeł prądu. Katoda w postaci cienkiego żarnika szybko się nagrzewa po włączeniu grzania, co jest bardzo wygodne. Ale dużą wadą tych katod są pasożytnicze pulsacje prądu anodowego, gdy ogrzewanie jest zasilane prądem przemiennym. Tworzą wiele zakłóceń, zniekształcając i zagłuszając użyteczne sygnały. Przy odbiorze słuchowym pulsacje te objawiają się charakterystycznym brzęczeniem – „zmiennym tłem prądu”. Wadą cienkich bezpośrednio żarzonych katod jest efekt mikrofonu. Polega na tym, że prąd anodowy pulsuje podczas mechanicznego wstrząsania lampy. Wstrząsy zewnętrzne powodują drgania katody. Odległość między katodą a innymi elektrodami jest różna. Prowadzi to do tętnienia prądu anodowego. Powszechnie stosowane są katody pośrednio żarzone. Zwykle katoda żarzona pośrednio ma rurkę niklową z warstwą tlenku, wewnątrz której włożony jest grzejnik wolframowy zwinięty w pętlę. W celu izolacji od katody grzejnik pokryty jest masą kalcynowanego tlenku glinu, zwanego alund. Przy znacznej długości grzałka jest kilkakrotnie zginana lub skręcana wzdłuż linii śrubowej. W niektórych lampach katoda jest wykonana w postaci niskiego cylindra z górną podstawą pokrytą tlenkiem. Wewnątrz cylindra znajduje się grzałka z izolacją alundową w kształcie pętli zwiniętej w spiralę. Katody ogrzewane pośrednio są zwykle tlenkowe. Główną zaletą pośrednio żarzonych katod to prawie całkowite wyeliminowanie szkodliwych tętnień przy zasilaniu prądem przemiennym. Praktycznie nie ma wahań temperatury, ponieważ masa, a tym samym pojemność cieplna tych katod jest znacznie większa niż katod bezpośrednio żarzonych. Pośrednio żarzona katoda ma dużą bezwładność cieplną. Od momentu włączenia prądu żarnika do całkowitego nagrzania katody mijają dziesiątki sekund. Taka sama ilość czasu jest potrzebna do schłodzenia katody. Katoda ogrzewania pośredniego jest ekwipotencjalna. Wzdłuż niego nie ma spadku napięcia z prądu żarzenia. Napięcie anodowe dla wszystkich punktów jego powierzchni jest takie samo. Nie pulsuje, gdy napięcie żarnika waha się. Zaletą pośrednio żarzonych katod jest niewielki efekt mikrofonu. Masa katody jest stosunkowo duża i trudno jest wprowadzić ją w stan oscylacji. Pośrednio żarzone katody mają pewne wady. Są bardziej złożone w konstrukcji i mają nieco niższą wydajność. Katody z żarnikiem pośrednim są trudne do zaprojektowania dla bardzo niskich prądów i dlatego są mniej odpowiednie dla energooszczędnych lamp zasilanych bateryjnie o małej mocy. 27. PRAWO MOCY TRZECH DRUGIE DLA DIODY Dla diody pracującej w trybie ładowania kosmicznego prąd anodowy i napięcie anodowe są powiązane nieliniową zależnością, która na podstawie obliczeń teoretycznych jest w przybliżeniu wyrażona przez tzw. potęgę 3 drugiego prawa: /a = dia2/XNUMX , gdzie współczynnik zależy od wymiarów geometrycznych i kształtu elektrod, a także od wybranych jednostek. Prąd anodowy jest proporcjonalny do napięcia anodowego do potęgi 3/2, a nie do pierwszej potęgi, jak w prawie Ohma. Jeśli na przykład napięcie anodowe zostanie podwojone, to prąd anodowy wzrośnie około 2,8 raza, czyli będzie o 40% większy niż powinien być zgodnie z prawem Ohma. W ten sposób prąd anodowy rośnie szybciej niż napięcie anodowe. Graficznie prawo stopnia trzech sekund jest reprezentowane przez zakrzywioną linię zwaną parabola półsześcienna. Moc prawa trzech sekund obowiązuje dla dodatnich napięć anodowych, mniejszych niż napięcia nasycenia. Jeśli odszyfrujemy współczynnik q w prawie mocy trzech sekund, to to prawo dla diody z płaskimi elektrodami należy zapisać w następujący sposób: ia \u2,33d 10 6-2 (Qa / d3a. k) Ua2 / XNUMX, gdzie Qa to obszar anody, da. k - odległość "anoda - katoda". W przypadku diod z elektrodami o innym kształcie wprowadza się poprawki do stałego współczynnika, a Qa jest powierzchnią czynną anody, czyli powierzchnią przejmującą główny przepływ elektronów. W tym wzorze prąd uzyskuje się w amperach, jeśli napięcie jest przyjmowane w woltach, a Qa i d2ak są wyrażane w dowolnych identycznych jednostkach, na przykład w milimetrach kwadratowych. Prąd jest odwrotnie proporcjonalny do kwadratu odległości anoda-katoda. Zmniejszenie tej odległości dramatycznie zwiększa ten prąd anodowy. Potęga prawa trzech sekund, choć niedokładna, jest przydatna, ponieważ uwzględnia nieliniowe właściwości lampy próżniowej w jej najprostszej postaci. Rozważ wyprowadzenie wzoru na prawo potęgi trzech sekund dla diody z płaskimi elektrodami. Przyjmiemy, że ładunek przestrzenny q, w skład którego wchodzą wszystkie elektrony lecące do anody, znajduje się tak blisko katody, że odległość między tym ładunkiem a „anodą” można przyjąć za równą odległości anoda-katoda da.k . Jeżeli czas przelotu elektronów na odległość da.k. jest równe t, to wartość prądu anodowego wynosi: ia, = q/ t. Ładunek q można wyrazić jako napięcie anodowe i pojemność anodowo-katodową Saq: q= Sa.k. Ua. Jednocześnie dla pojemności Ca.k. mamy formułę: Sa.k. \u0d ?0Qa / da.k., gdzie ?8,86 \u10d 16 · 2-XNUMXF / m to przenikalność próżni, a Qa to powierzchnia anody. Czas lotu t jest określony przez średnią prędkość: t=da. k. / ?av, ale ?av = v/XNUMX, gdzie v jest prędkością końcową. W rzeczywistości, ze względu na niejednorodność pola, średnia prędkość jest nieco mniejsza niż określona powyższymi wzorami. Ze względu na przybliżenie wyprowadzenia stały współczynnik w tym wyrażeniu jest nieco zawyżony. Bardziej rygorystyczne wyprowadzenie daje dokładniejszą wartość stałego współczynnika, ale to wyprowadzenie jest również oparte na założeniach, które nie odpowiadają rzeczywistości. W szczególności zakłada się, że początkowa prędkość elektronu wynosi zero, a rozkład potencjału jest taki sam jak w reżimie nasycenia, chociaż prawo mocy trzech sekund dotyczy tylko reżimu ładunku kosmicznego. 28. PROCESY FIZYCZNE W TRIODZIE Katoda i anoda pracują w triodzie tak samo jak w diodzie. W trybie ładowania kosmicznego w pobliżu katody powstaje potencjalna bariera. Podobnie jak w diodzie, wielkość prądu katodowego zależy od wysokości tej bariery. Działanie sterujące siatki w triodzie podobne do działania anody w diodzie. Zmiana napięcia sieci powoduje zmianę natężenia pola generowanego przez sieć. Pod wpływem tego zmienia się wysokość potencjalnej bariery w pobliżu katody. W konsekwencji zmieni się liczba elektronów, które pokonają tę barierę, tj. wartość prądu bariery. Gdy napięcie sieci zmienia się na stronę dodatnią, bariera potencjału zmniejsza się, więcej emitowanych elektronów pokonuje ją, mniej z nich wraca do katody, a prąd katody wzrasta. A gdy napięcie sieciowe zmienia się w kierunku ujemnym, bariera potencjału na katodzie wzrasta. Wtedy będzie w stanie pokonać mniejszą liczbę elektronów. Liczba elektronów powracających do katody wzrośnie, a prąd katody zmniejszy się. Siatka oddziałuje na prąd katodowy znacznie silniej niż anoda, ponieważ znajduje się bliżej katody niż anoda i stanowi ekran dla pola elektrycznego anody. Stosunek wpływu siatki i anody na prąd anodowy charakteryzuje najważniejszy parametr triody - wzmocnienie. Wzmocnienie jest liczbą abstrakcyjną pokazującą, ile razy napięcie sieciowe oddziałuje na prąd anodowy silniejszy niż napięcie anodowe. Stosunkowo niewielkie ujemne napięcie sieci może znacznie zmniejszyć prąd anodowy, a nawet całkowicie go zatrzymać. Wzrostowi napięcia sieciowego sieci towarzyszy wzrost prądów anodowych i sieciowych. Przy dużych dodatnich napięciach sieci anodowej prąd sieci wzrasta tak bardzo, że prąd anodowy może się nawet zmniejszyć. Tak zwany efekt wyspy. Ze względu na niejednorodną strukturę siatki, pole generowane przez siatkę jest również niejednorodne i w różny sposób oddziałuje na barierę potencjału przy katodzie w różnych jej częściach. Siatka przez swoje pole ma silniejszy wpływ na barierę potencjału w pobliżu tych części katody, które są bliżej przewodników siatki. Nazywa się charakterystykę triody podczas pracy na prądzie stałym i bez obciążenia statyczny. Istnieje teoretyczna i rzeczywista charakterystyka triod. Charakterystyki teoretyczne można zbudować na podstawie prawa trzech sekund i nie są one dokładne. Rzeczywiste cechy są usuwane eksperymentalnie. Są dokładniejsze. Przyczyny odchylenia rzeczywistych charakterystyk od teoretycznych dla triody są takie same jak dla diody. Istotny wpływ mają różnice temperatur w różnych punktach katody, nieekwipotencjalność katody oraz dodatkowe nagrzewanie katody prądem anodowym. Na przekroje charakterystyk dla małych prądów anodowych duży wpływ ma początkowa prędkość elektronów, różnica potencjałów kontaktowych i termo-EMF. W triodzie czynniki te oddziałują silniej niż w diodzie, ponieważ ich działanie rozciąga się nie tylko na obwód anodowy, ale także na obwód siatki. 29. NAPIĘCIE CZYNNE I PRAWO MOCY TRZECH SEKUND DLA TRIOD Napięcie robocze triody pozwala obliczyć prąd katody triody poprzez zastąpienie triody równoważną diodą. Ta wymiana jest następująca. Jeżeli w triodzie zamiast siatki jest umieszczona anoda, która ma taką samą powierzchnię, jaką zajmuje siatka, to w tej diodzie, przy części jej napięcia anodowego, prąd anodowy jest równy prądowi katody w triodzie. Napięcie przyłożone do anody równoważnej diody i wytworzenie w niej prądu anodowego równego prądowi katodowemu prawdziwej diody nazywa się efektywnym id napięcia. Jego działanie jest równoważne połączonemu działaniu napięć sieci i anodowych. Oznacza to, że napięcie robocze powinno wytwarzać takie samo natężenie pola w pobliżu katody równoważnej diody, jak w pobliżu katody triody. Wielkość efektywnego napięcia określa się w przybliżeniu wzorem Ud ~ Uc + Dia = Uc + Ua /?. Napięcie sieciowe oddziałuje swoim polem bez osłabienia, a pole wytworzone przez napięcie anodowe w przestrzeni „siatka – katoda” jest osłabiane w wyniku ekranowania siatki. Osłabienie działania anody charakteryzuje się przepuszczalnością D lub współczynnikiem wzmocnienia ?. Dlatego wartości Uа nie można dodać do Uс, ale należy ją najpierw pomnożyć przez D lub podzielić przez ? (? i D są odwrotnościami tylko wtedy, gdy ic = 0). Przybliżony wzór na Ud jest przybliżony, ponieważ nie uwzględnia, że pole w pobliżu katody może być niejednorodne. Ten wzór jest używany w przypadkach, gdy siatka nie jest zbyt rzadka (dla D<0,1 lub ?>10). Efektywny ładunek qd powinien być równy sumie ładunku q1 wytworzonego na katodzie w wyniku działania pola siatki i ładunku q2 wytworzonego przez pole przenikające siatkę z anody. Wyraźmy te ładunki w postaci napięć i pojemności: q1= Csk, Uc i q2 = Cac Ua. Ładunek q2 na katodzie jest równy tej małej części całkowitego ładunku anodowego, z którego linie sił elektrycznych przechodzą przez siatkę do katody. Zastępując qD sumą q1 + q2, otrzymujemy: ud = (q1 + q2) / Cs.c. \uXNUMXd (CC.c. uc + Ca.c. ua) / Ccc. = uс + uаса.к. / Ssk. Oznaczmy D= Sa.k. / Ssk. Wtedy w końcu otrzymujemy: ud = uc + DUa, W równoważnej diodzie prąd anodowy jest równy prądowi katodowemu triody, a skuteczne napięcie odgrywa rolę napięcia anodowego. Dlatego prawo stopnia trzech sekund dla triody można zapisać w następujący sposób: ik = dd3/2= g(jest + Dua)3/2. Biorąc pod uwagę, że w diodzie zastępczej anoda znajduje się w miejscu siatki prawdziwej triody, współczynnik g dla triody z płaskimi elektrodami wynosi: g = 2,33 10-6(Qа/d2s.k.) . Powierzchnia anody równoważnej diody w tym przypadku jest równa powierzchni rzeczywistej anody. Prawo potęgi trzech sekund dla triod jest bardzo przybliżone. Niedokładność w określeniu napięcia efektywnego jest niezbędna. Niemniej jednak prawo mocy trzech sekund jest przydatne w rozważaniu teorii działania triody oraz przy projektowaniu lamp. 30. PRĄD SIECIOWY W TRIODZIE Ze względu na początkowe prędkości elektronów emitowanych z katody, różnicę potencjałów stykowych oraz termo-EMF działające w obwodzie siatki, charakterystyka prądu siatki zaczyna się w obszarze małych ujemne napięcia sieci. Chociaż prąd sieciowy w tym obszarze jest bardzo mały, a dla lamp odbiorczych-wzmacniających jest to niewielki ułamek miliampera, w wielu przypadkach należy to wziąć pod uwagę. Charakterystyki prądowe sieci zaczynające się w obszarze dodatnich napięć sieci są mniej powszechne. Uzyskuje się je, gdy różnica potencjałów kontaktowych wytwarza ujemne napięcie na siatce i działa silniej niż początkowa prędkość elektronów. W lampach pracujących przy znacznych dodatnich napięciach w sieci, takich jak generatory, wraz ze wzrostem dodatniego napięcia sieci najpierw wzrasta prąd sieci i osiąga maksimum, które czasami znajduje się w obszarze ujemnych wartości prądu. Przy dalszym wzroście napięcia sieciowego prąd ponownie wzrasta. Zjawisko to tłumaczy się wtórną emisją sieci. Pod wpływem elektronów pierwotnych przy dodatnim napięciu siatki, elektrony wtórne są z niej wybijane. Wraz ze wzrostem napięcia sieci wzrasta współczynnik emisji wtórnej i wzrasta strumień elektronów pierwotnych bombardujących sieć. W rezultacie wzrasta liczba elektronów wtórnych. Ich przepływ kierowany jest do anody, która ma wyższy potencjał dodatni. W obwodzie siatki pojawia się prąd elektronów wtórnych, który ma kierunek przeciwny do prądu elektronów pierwotnych. Wynikowy prąd siatki zmniejsza się, a nawet może się odwrócić, jeśli współczynnik emisji wtórnej jest większy niż 1. W tym przypadku prąd anodowy wzrasta, ponieważ prąd elektronów wtórnych dodaje się do prądu elektronów pierwotnych wylatujących z katody. Nazywa się zjawisko występowania prądu elektronów wtórnych efekt dinatronu. Gdy napięcie sieci przekroczy napięcie anodowe, pole pomiędzy anodą a siecią opóźnia elektrony wtórne sieci i powrócą one do sieci. Ale z drugiej strony elektrony wtórne wybite z anody będą przyspieszane przez to pole i lecą do siatki, czyli od strony anody powstaje efekt dynatronowy. W tym przypadku prąd siatki dodatkowo wzrasta ze względu na prąd elektronów wtórnych, a prąd anodowy nieco maleje. Przy ujemnym napięciu sieci prąd sieciowy jest bardzo mały. Nazywa się to prądem odwrotnym sieci, ponieważ jego kierunek jest przeciwny do kierunku prądu sieci, gdy napięcie sieci jest dodatnie (elektrony prądu wstecznego w zewnętrznych przewodach obwodu sieci poruszają się w kierunku sieci). Prąd wsteczny sieci składa się z kilku składowych: prądu jonowego, tercoil i prądu upływu. Wraz ze spadkiem ujemnego napięcia sieci wzrasta prąd anodowy i wzrasta jonizacja. Do siatki zbliża się większa liczba jonów i prąd jonów wzrasta. Przy dodatnim napięciu siatki prąd elektronów gwałtownie wzrasta i tak dominuje nad prądem jonów, że ten ostatni praktycznie nie odgrywa żadnej roli. Jeśli siatka ma wysoką temperaturę, może wystąpić termionowy prąd emisyjny (prąd cieplny) siatki. Aby zmniejszyć ten prąd, kratki wykonane są z metalu o wysokiej funkcji pracy i niskim współczynniku emisji wtórnej. 31. CHARAKTERYSTYKA WYDAJNOŚCIOWA TRIODY Charakterystyka siatki anodowej zwany wykresem zależności prądu anodowego od napięcia sieci przy stałych wartościach napięcia źródła anodowego i rezystancji obciążenia. W przeciwieństwie do charakterystyk statycznych, charakterystyka pracy nie jest uzależniona od warunku stałości napięcia anodowego, gdyż zmienia się ono w trybie pracy. Kształt charakterystyki pracy i jej położenie zależą od wielkości i charakteru rezystancji obciążenia anodowego. Aby zbudować charakterystykę pracy sieci anodowej, należy określić rodzinę charakterystyk statycznych sieci anodowej, napięcie źródła anody oraz rezystancję obciążenia. Jeśli napięcie anodowe jest równe napięciu źródła anodowego, a prąd wynosi zero, lampa jest wyłączona, ponieważ tylko w tym przypadku nie ma spadku napięcia na rezystancji obciążenia. Pracująca charakterystyka siatki anodowej ma mniejszą stromość niż charakterystyka statyczna. Im większy prąd anodowy, tym niższe napięcie anodowe. Dlatego krzywa wydajności zawsze przechodzi przez przecięcie krzywych statycznych. Nachylenie charakterystyki pracy zależy od rezystancji obciążenia. Wraz ze wzrostem rezystancji obciążenia prąd anodowy maleje, a krzywa wydajności staje się bardziej płaska. Gdy rezystancja obciążenia jest stała, krzywa wydajności przesuwa się w prawo, jeśli napięcie źródła anody spada, lub w lewo, jeśli napięcie anody wzrasta. Wykorzystując charakterystykę pracy można obliczyć zmiany prądu anodowego wraz ze zmianą napięcia sieci. Można również wyznaczyć napięcie anodowe, biorąc pod uwagę, że każdemu punktowi charakterystyki roboczej odpowiada pewne napięcie anodowe. Aby zbudować charakterystykę pracy anody, należy określić rodzinę charakterystyk statycznych anody, a także napięcie anodowe i rezystancję obciążenia. Charakterystyczną charakterystyką pracy jest linia obciążenia. Za pomocą linii obciążenia można określić prąd anodowy i napięcie anodowe przy dowolnym napięciu sieci. Linia obciążenia pozwala rozwiązać inne problemy. Można np. stwierdzić, przy jakim napięciu sieci uzyskuje się prąd anodowy o żądanej wartości. Charakterystyka robocza anody w porównaniu z charakterystyką anoda-siatka ma pewne zalety. Ponieważ jest to linia prosta, składa się z dwóch punktów i jest dokładniejsza. Z jego pomocą wygodniej jest określić napięcie anodowe, ponieważ jest wykreślone wzdłuż odciętej. Do obliczeń praktycznych częściej stosuje się charakterystykę pracy anody, choć w niektórych przypadkach wygodniejsza okazuje się charakterystyka anoda-siatka. Nachylenie rozpatrywanej charakterystyki zależy od rezystancji obciążenia. Im większa rezystancja obciążenia, tym bardziej spłaszczona linia obciążenia. Jeśli rezystancja obciążenia wynosi zero, linia obciążenia staje się pionową linią prostą. Gdy napięcie obciążenia jest równe nieskończoności, linia obciążenia pokrywa się z osią odciętą. W takim przypadku przy dowolnym napięciu prąd anodowy wynosi zero. W niektórych przypadkach konieczne jest skonstruowanie krzywej wydajności anody-siatki, jeśli dostępne są tylko charakterystyki statyczne anody. 32. URZĄDZENIE I DZIAŁANIE TETRODY Lampy czteroelektrodowe lub tetrody, mają drugą siatkę, zwaną ekranowaniem lub ekranem, umieszczoną między siatką kontrolną a anodą. Zadaniem siatki ekranującej jest zwiększenie wzmocnienia i rezystancji wewnętrznej oraz zmniejszenie pojemności przepustowej. Jeśli siatka ekranująca jest połączona z katodą, to osłania katodę i siatkę kontrolną przed działaniem anody. Siatka ekranująca przechwytuje większość pola elektrycznego anody. Można powiedzieć, że tylko niewielka część linii sił elektrycznych wychodzących z anody przenika przez siatkę ekranującą. Osłabienie pola anodowego siatki ekranującej jest uwzględniane przez wartość przepuszczalności tej siatki. Pole elektryczne przenikające przez siatkę ekranującą jest następnie przechwytywane przez siatkę kontrolną, przez którą przenika również niewielka część linii pola. Osłabienie pola anodowego przez siatkę kontrolną zależy od jego przepuszczalności. Przez obie siatki od anody do bariery potencjału w pobliżu katody przenika nieznaczna część ogólnej liczby linii pola, co charakteryzuje się iloczynem przepuszczalności siatki. Ta wynikająca z tego przepuszczalność obu siatek nazywana jest przepuszczalnością tetrody. Przepuszczalność tetrody charakteryzuje stosunek wpływu anody i siatki sterującej na prąd katody. Pokazuje, jaka część wpływu napięcia sieci sterującej na prąd katody jest skutkiem napięcia anodowego. Za pomocą dwóch niezbyt gęstych siatek uzyskuje się duże wzmocnienie i wysoką rezystancję wewnętrzną. W tym przypadku, jeżeli do siatki ekranującej zostanie przyłożone znaczne napięcie dodatnie, wówczas charakterystyki siatki anodowej tetrody są „lewe”, tj. tetroda może pracować normalnie w obszarze ujemnych napięć siatki. Prąd katodowy w tetrodzie jest sumą prądów siatek anodowych, ekranujących i sterujących. Siatka ekranująca zasilana jest stałym napięciem dodatnim, które stanowi 20-50% napięcia anodowego. Powstaje w sekcji „katoda – siatka ekranująca – pole przyspieszające”, obniża barierę potencjału na katodzie. Jest to konieczne do ruchu elektronów do anody. Anoda przechodząca przez dwie siatki ma bardzo słaby wpływ na barierę potencjału w pobliżu katody. Jeżeli napięcie siatki ekranującej wynosi zero, to pole hamujące wytworzone przez ujemne napięcie siatki sterującej jest znacznie silniejsze niż słabe pole przyspieszające przenikające z anody. Otrzymane pole w sekcji „siatka kontrolna – katoda” okazuje się opóźniające. Innymi słowy, napięcie robocze w tym przypadku jest ujemne, a bariera potencjału na katodzie jest tak wysoka, że elektrony nie mogą jej pokonać. Dlatego lampa jest zablokowana, a prąd anodowy wynosi zero. Pojemność między elektrodami lampy zmniejsza się w przybliżeniu tyle razy, ile wzrasta wzmocnienie. Im grubsza siatka ekranująca, im mniejsza jest jej przepuszczalność, tym bardziej spada przepustowość. Gdyby siatka ekranująca była stała, wówczas pojemność skrośna zmniejszyłaby się do zera, ale siatka przestałaby przepuszczać elektrony do anody. 33. EFEKT DYNATRONU W TETRODZIE Istotną wadą tetrody jest: efekt dinatronowy anody. Elektrony uderzające w anodę wybijają z niej elektrony wtórne. Emisja wtórna z anody występuje we wszystkich lampach, ale w diodach i triodach nie powoduje konsekwencji i pozostaje niewyczuwalna. W tych lampach elektrony wtórne, które wypłynęły z anody, wracają do niej, ponieważ anoda ma najwyższy potencjał dodatni w porównaniu z potencjałami innych elektrod. Dlatego nie powstaje prąd elektronów wtórnych. W tetrodzie emisja wtórna z anody nie objawia się, jeśli napięcie siatki ekranującej jest mniejsze niż napięcie anody. W tych warunkach elektrony wtórne wracają do anody. Jeżeli tetroda pracuje w trybie obciążenia, to wraz ze wzrostem prądu anodowego wzrasta spadek napięcia na obciążeniu, a napięcie anodowe w pewnych odstępach czasu może być mniejsze niż stałe napięcie siatki ekranującej. Wtedy elektrony wtórne, wylatujące z anody, nie wracają do niej, lecz są przyciągane do siatki ekranującej, która ma wyższy potencjał dodatni. Istnieje prąd elektronów wtórnych skierowany przeciwnie do prądu elektronów pierwotnych. Całkowity prąd anodowy maleje, a prąd siatki ekranującej wzrasta. Zjawisko to nazywa się efektem dinatronu anodowego. Efekt dinatronu znacząco wpływa na charakterystykę anodową tetrody. Przy zerowym napięciu anodowym występuje bardzo mały początkowy prąd anodowy, który zwykle można pominąć. Prąd siatki ekranującej jest najwyższy. Podobnie jak w trybie powrotnym w triodzie, w tym przypadku elektrony, które przeszły przez siatkę ekranującą, uczestniczą w tworzeniu jej prądu wraz z elektronami przechwyconymi przez tę siatkę. Zmiana zmian napięcia anodowego iwysokość tej bariery, w wyniku której rozkład strumienia elektronów między anodą a siatką ekranującą gwałtownie się zmienia. W charakterystyce anodowej tetrody można zauważyć cztery obszary. Pierwszy obszar odpowiada niskim napięciu anodowym, do około 10–20 V. Nadal nie ma emisji wtórnej z anody, ponieważ prędkość elektronów pierwotnych jest niewystarczająca do wybicia elektronów wtórnych. Wraz ze wzrostem napięcia anodowego obserwuje się gwałtowny wzrost prądu anodowego i spadek prądu siatki ekranującej, co jest typowe dla trybu powrotnego. Napięcie anodowe ma niewielki wpływ na prąd katodowy, ponieważ pole anodowe działa na barierę potencjału na katodzie przez dwie siatki. Dlatego prąd katodowy niewiele się zmienia, a jego charakterystyka nieznacznie wzrasta. Jeżeli napięcie anodowe przekracza 10–20 V, pojawia się emisja wtórna i występuje efekt dynatronowy. Wraz ze wzrostem napięcia anodowego wzrasta wtórna emisja anody, maleje prąd anodowy i wzrasta prąd siatki ekranującej. Minimalny prąd anodowy uzyskuje się przy najbardziej wyraźnym efekcie dynatronowym. W takim reżimie prąd elektronów wtórnych jest największy. Prąd ten zależy od wielkości emisji wtórnej i napięcia siatki-anody ekranującej, która wytwarza pole przyspieszające dla elektronów wtórnych. Gdy napięcie anodowe staje się wyższe niż napięcie siatki ekranu, następuje nieznaczny wzrost prądu anodowego i niewielki spadek prądu siatki ekranu. Emisja wtórna z anody istnieje w tym regionie, ale wszystkie elektrony wtórne wracają do anody, tj. nie ma efektu dynatronowego z anody. Z drugiej strony elektrony wtórne wybite z siatki ekranującej uderzają w anodę, przez co prąd anodowy nieco wzrasta, a prąd siatki ekranującej maleje. Aby zapobiec występowaniu efektu dynatronu, napięcie siatki ekranującej musi być zawsze niższe niż napięcie anodowe. 34. URZĄDZENIE I DZIAŁANIE PENTOD Główna wada tetrody - efekt dynatronu - doprowadziła do rozwoju i powszechnego stosowania lampy pięcioelektrodowe zwane pentodami. W nich wszystkie pozytywne właściwości tetrod są jeszcze bardziej wyraźne, a jednocześnie eliminowany jest efekt dynatronu. W pentodzie, w celu wyeliminowania efektu dynatronu, pomiędzy anodą a siatką ekranującą znajduje się jeszcze jedna siatka. Nazywana jest siatką ochronną, ponieważ chroni lampę przed wystąpieniem efektu dynatronu. Istnieją również inne nazwy tej siatki: antydynatron, antydynatron, pentoda, trzecia. Siatka ochronna jest zwykle połączona z katodą, to znaczy ma potencjał zerowy w stosunku do katody i ujemny w stosunku do anody. W niektórych przypadkach do sieci ochronnej przykładane jest niewielkie napięcie prądu stałego. Na przykład, aby zwiększyć moc użyteczną, pentody generatora działają przy dodatnim napięciu na sieci ochronnej, a aby modulować oscylacje poprzez zmianę napięcia sieci ochronnej, ustawia się na nie ujemne napięcie polaryzacji. Jednak nawet w tych przypadkach potencjał siatki ochronnej zwykle pozostaje znacznie niższy niż potencjał anodowy, a efekt antydynatronowy tej siatki jest w przybliżeniu taki sam jak przy jej potencjale zerowym. W wielu pentodach siatka ochronna jest połączona z katodą wewnątrz lampy i wtedy napięcie na tej siatce jest zawsze zerowe. Jeśli istnieje wyjście siatki ochronnej, to jej połączenie z katodą odbywa się w instalacji obwodu. Rola siatki ochronnej polega na tym, że pomiędzy nią a anodą powstaje pole elektryczne, które spowalnia, zatrzymuje się i zawraca do anody elektrony wtórne wybite z anody. Nie mogą przenikać przez siatkę ekranującą, nawet jeśli jej napięcie jest wyższe od anodowego, a efekt dynatronu jest całkowicie wyeliminowany. W obszarze pomiędzy ekranami a siatkami ochronnymi dla elektronów wylatujących z katody powstaje pole opóźniające, które może wydawać się, że spowoduje to zmniejszenie prądu anodowego. Jednak elektrony, które otrzymały dużą prędkość pod działaniem przyspieszającego pola siatki ekranującej i przelatując przez nią, docierają do siatki ochronnej i nie tracą całkowicie swojej prędkości, ponieważ potencjał w przestrzeni między zwojami tej siatki nie jest zerowy, ale dodatni. Na przewodach siatki ochronnej występuje potencjał zerowy, aw przerwach między nimi potencjał jest większy od zera, ale mniejszy niż na anodzie. W szczelinie między anodą a siatką ekranującą powstaje wtórna bariera potencjału, której nie mogą pokonać wtórne elektrony wybijane z anody. Bariera ta znacząco wpływa na proces dystrybucji prądu w pentodzie. Pentody różnią się od tetrod wyższym wzmocnieniem, sięgającym kilku tysięcy dla niektórych pentod. Wynika to z faktu, że siatka ochronna pełni rolę dodatkowej siatki ekranującej. Dlatego w pentodzie działanie anody jest jeszcze słabsze niż w tetrodzie w porównaniu z działaniem siatki sterującej. W związku z tym wzrasta również opór wewnętrzny, który dla niektórych pentod sięga milionów omów. Pojemność skrośna staje się jeszcze mniejsza niż w przypadku tetrod. Nachylenie pentod jest tego samego rzędu co triod i tetrod, tj. w zakresie 1-50 mA / V. Pentodę można zredukować do równoważnej diody w taki sam sposób, jak zrobiono to w przypadku tetrody. Przepuszczalność pentody jest bardzo małą wartością. Dlatego wzmocnienie pentody może być bardzo duże. 35. PARAMETRY TETROD I PENTOD Parametry statyczne tetrod i pentod są wyznaczane podobnie jak parametry triody. Do praktycznego określenia parametrów przyjmuje się stosunek przyrostów skończonych. Siatka kontrolna w tetrodach i pentodach jest usytuowana względem katody w taki sam sposób jak w triodach. Dlatego stromość tetrod i pentod jest tego samego rzędu co triod, tj. e. to jednostki lub dziesiątki miliamperów na wolt, chociaż uzyskuje się pewien spadek nachylenia ze względu na fakt, że prąd anodowy jest zawsze mniejszy niż prąd katodowy. Ze względu na to, że działanie napięcia anodowego w tetrodzie lub pentodzie jest wielokrotnie osłabiane, rezystancja wewnętrzna jest dziesiątki i setki razy większa niż tetrody i sięga setek kiloomów. Rezystancja wewnętrzna silnie zależy od procesu dystrybucji prądu, ponieważ gdy zmienia się napięcie anodowe, w wyniku tego procesu zmienia się prąd anodowy. Możemy założyć, że rezystancja wewnętrzna pentody składa się z dwóch rezystancji połączonych równolegle. Jednym z nich jest działanie pola anodowego przez trzy siatki na barierę potencjału przy katodzie, dzięki czemu następuje bardzo mała zmiana prądu anodowego. Im grubsza siatka, tym większy opór. Druga rezystancja jest określona przez zmianę prądu anodowego spowodowaną procesem dystrybucji prądu i jest zwykle znacznie mniejsza niż pierwsza rezystancja. Współczynnik wzmocnienia może być dziesiątki i setki tysięcy razy większy niż triod, czyli jego wartość sięga setek i tysięcy. W tetrodach i pentodach prąd katodowy jest zawsze większy niż prąd anodowy, ponieważ prąd siatki ekranującej zawsze istnieje razem z prądem anodowym. Ze względu na znaczną nieliniową charakterystykę tetrody i pentody, parametry zmieniają się dość silnie wraz ze zmianą modu. Wraz ze wzrostem ujemnego napięcia siatki sterującej, tj. ze spadkiem prądu anodowego, nachylenie maleje, a rezystancja wewnętrzna i wzmocnienie wzrasta. Cechą tetrod i pentod w porównaniu z triodami jest silna zależność wzmocnienia od modu. Jeśli charakterystyki przeplatają się w trybie powrotu, wówczas nachylenie i wzmocnienie mogą mieć wartości równe zeru i mniejsze od zera. Wraz ze wzrostem ujemnego napięcia siatki sterującej charakterystyka anody w obszarze roboczym staje się bardziej płaska i bliżej siebie, co odpowiada wzrostowi rezystancji wewnętrznej i spadkowi nachylenia. W niektórych obwodach stosuje się tetrodę lub pentodę, dzięki czemu jej część triodowa, składająca się z katody, siatki kontrolnej i siatki ekranowej, działa w jednym stopniu, a cała lampa jest częścią innego stopnia. Nachylenie i wzmocnienie siatki ekranującej zwykle nie są interesujące, ponieważ siatka ekranująca z reguły nie jest wykorzystywana jako siatka kontrolna, a napięcie na niej jest stałe. Oprócz rozważanych parametrów istnieją inne podobne do tych wskazanych dla triody. Przy obliczaniu trybów pracy i praktycznym zastosowaniu tetrod i pentod należy wziąć pod uwagę wartości graniczne prądów, napięć i mocy, w szczególności ważna jest moc graniczna uwalniana na siatce ekranującej. 36. URZĄDZENIE I DZIAŁANIE TETRODY PROMIENIOWEJ Później powstały i rozpowszechniły się pentody tetrody wiązkowe. W nich efekt dynatronu jest eliminowany poprzez stworzenie nieprzezwyciężalnej bariery potencjału dla wybijanych z anody elektronów wtórnych, znajdującej się pomiędzy siatką ekranującą a anodą. Tetroda wiązkowa w porównaniu z konwencjonalną tetrodą ma następujące cechy konstrukcyjne. Zwiększono odległość siatki ekranującej od anody. Siatka kontrolna i osłonowa mają taką samą liczbę zwojów, a ich zwoje znajdują się dokładnie naprzeciwko siebie. W przestrzeni między siatkami skupiają się przepływy elektronów. Dzięki temu elektrony przelatują od katody do anody w gęstszych wiązkach – „wiązkach”. Aby elektrony nie leciały w kierunku uchwytów siatki, do katody podłączone są specjalne ekrany lub płytki formujące wiązkę. Ponadto części powierzchni katody naprzeciw uchwytów siatki nie są pokryte warstwą tlenku, a zatem nie powodują emisji. W tetrodzie wiązkowej uzyskuje się gęstsze przepływy elektronów niż w konwencjonalnej tetrodzie. Wzrost gęstości prądu powoduje wzrost objętościowej gęstości ładunku. To z kolei powoduje zmniejszenie potencjału w przestrzeni między anodą a siatką ekranującą. Jeżeli napięcie anodowe jest niższe niż napięcie siatki ekranującej, to efekt dynatronowy obserwuje się w konwencjonalnej tetrodzie, ale nie wystąpi w tetrodzie wiązki, ponieważ bariera potencjału dla elektronów wtórnych powstaje w „siatce ekranującej - anodzie " luka. Elektrony wtórne, które mają stosunkowo małe prędkości początkowe, nie mogą pokonać bariery potencjału i dotrzeć do siatki ekranującej, chociaż napięcie na tej ostatniej jest wyższe niż na anodzie. Elektrody pierwotne, osiągając duże prędkości uzyskane dzięki napięciu siatki ekranującej, pokonują barierę potencjału i opadają na anodę. W konwencjonalnych tetrodach siatka ekranująca „przerywa” strumienie elektronów i przechwytuje wiele elektronów. Posiadacze siatki mają ten sam efekt. Dlatego w zwykłych tetrodach nie uzyskuje się dostatecznie gęstych przepływów elektronów i nie powstaje niezbędna bariera potencjału dla elektronów wtórnych. Powstawanie bariery potencjału ułatwia zwiększona odległość pomiędzy siatką ekranującą a anodą. Im większa ta odległość, tym więcej elektronów hamowanych o małych prędkościach znajduje się tutaj. To właśnie te elektrony zwiększają objętość ładunku ujemnego, a spadek potencjału staje się bardziej znaczący. Zaletą tetrod strumieniowych w porównaniu z tetrodami konwencjonalnymi jest również znacznie niższy prąd siatki ekranującej. Jest bezużyteczny, a jego redukcja jest wysoce pożądana. W tetrodach wiązkowych elektrony przelatują przez szczeliny siatki ekranującej i prawie nie są przez nią przechwytywane. Dlatego prąd siatki ekranującej nie przekracza 5-7% prądu anodowego. Charakterystyki siatki anodowej tetrod strumieniowych są takie same jak w przypadku konwencjonalnych tetrod lub pentod. W potężnych stopniach wzmocnienia niskich i wysokich częstotliwości tetrody strumieniowe z powodzeniem zastępują pentody. Aby uzyskać lepszą wydajność, produkowane są pentody wiązki. Ich siatki są podobne do tych w tetrodzie wiązkowej, a elektrony lecą do anody w wiązkach przez szczeliny w siatce ochronnej. Dlatego w przypadku pentod wiązkowych prąd siatki ekranującej jest znacznie mniejszy niż w przypadku pentod konwencjonalnych. 37. ZASADA KONWERSJI CZĘSTOTLIWOŚCI Konwersja częstotliwości to każda zmiana częstotliwości. Na przykład podczas prostowania prądu przemiennego z częstotliwością zamienia się on w prąd stały, w którym częstotliwość wynosi zero. W generatorach energia prądu stałego o częstotliwości równej zero jest zamieniana na energię prądu przemiennego o pożądanej częstotliwości. Napięcie pomocnicze jest uzyskiwane z generatora małej mocy zwanego heterodyna. Na wyjściu konwertera uzyskuje się oscylację z nową przekonwertowaną częstotliwością, która nazywa się częstotliwością pośrednią. Jako przemiennik częstotliwości należy zastosować urządzenie nieliniowe lub parametryczne. Gdyby przetwornica częstotliwości była urządzeniem liniowym, po prostu dodałaby dwie oscylacje. Na przykład dodanie dwóch oscylacji o bliskich, ale nie wielokrotnych częstotliwościach dałoby dudnienia, czyli złożoną oscylację, w której częstotliwość zmieniałaby się w pewnych granicach wokół wartości średniej, a amplituda zmieniałaby się z częstotliwością równą częstotliwości różnica. Takie dudnienia nie zawierają oscylacji składowych o nowej częstotliwości. Ale jeśli uderzenia zostaną wykryte (wyprostowane), to z powodu nieliniowości tego procesu pojawia się składnik o częstotliwości pośredniej. Na wyjściu przetwornicy częstotliwości uzyskuje się złożoną oscylację, która ma składowe o wielu częstotliwościach. Wszystkie nowe częstotliwości, które są kombinacjami częstotliwości i ich harmonicznymi, nazywane są częstotliwościami kombinowanymi. Wybierając odpowiednią częstotliwość pomocniczą, można uzyskać nową częstotliwość.! Wśród nowych częstotliwości znajdują się harmoniczne oryginalnych oscylacji o częstotliwościach kilkakrotnie wyższych niż oryginalne. Ale można je łatwiej uzyskać przy nieliniowym zniekształceniu jednego z napięć wejściowych. Obecność dwóch napięć do występowania harmonicznych nie jest konieczna. Z reguły amplitudy oscylacji kombinacji (i harmonicznych) są tym mniejsze, im wyższe są wartości częstotliwości. Dlatego w większości przypadków oscylacja częstotliwości różnicowej, a czasem całkowitej, jest używana jako oscylacja nowej częstotliwości pośredniej. Częstotliwości kombinacyjne wyższego rzędu są rzadko używane. Konwersja częstotliwości w odbiornikach radiowych w większości przypadków odbywa się w taki sposób, że przy odbiorze sygnałów z różnych stacji radiowych działających na różnych częstotliwościach powstają oscylacje tej samej częstotliwości pośredniej. Pozwala to na uzyskanie dużego wzmocnienia i wysokiej selektywności, które pozostają prawie stałe w całym zakresie częstotliwości odbieranych sygnałów. Ponadto przy stałej częstotliwości pośredniej uzyskuje się stabilniejszą pracę stopni wzmacniających i są one znacznie prostsze w konstrukcji niż stopnie zaprojektowane dla zakresu częstotliwości. W odbiornikach radiowych i radiowych urządzeniach pomiarowych jako częstotliwość pośrednią stosuje się najczęściej częstotliwość różnicową, a częstotliwość pomocnicza jest zwykle wyższa niż częstotliwość przekonwertowanego sygnału. Ta zależność między częstotliwościami jest konieczna, jeśli częstotliwość pośrednia ma być wyższa niż częstotliwość sygnału. 38. LAMPY DO KONWERSJI CZĘSTOTLIWOŚCI Do konwersji częstotliwości wykorzystywane są różne urządzenia nieliniowe lub parametryczne. Na przykład w odbiornikach fal decymetrowych i centymetrowych w przetwornicach częstotliwości pracują diody próżniowe lub półprzewodnikowe. Triody służą do konwersji częstotliwości w zakresie fal decymetrowych i metrowych. Konwersja odbywa się w następujący sposób. Do lampy przykładane jest napięcie o częstotliwości sygnału i częstotliwości pomocniczej. Następnie prąd anodowy lampy pulsuje jednocześnie z tymi częstotliwościami. Ze względu na to, że lampa jest urządzeniem nieliniowym, czyli parametrycznym, w jej prądzie anodowym pojawiają się elementy o kombinacji częstotliwości. Obwód oscylacyjny anody jest dostrojony do jednego z nich, zwykle różnicy. Posiada wysoką rezystancję tylko dla prądu o częstotliwości rezonansowej i wytwarza wzmocnione napięcie tylko o częstotliwości pośredniej. W ten sposób obwód podkreśla oscylacje częstotliwości pośredniej. W obwodach przemienników częstotliwości należy w miarę możliwości wyeliminować połączenie między obwodami sygnałów wejściowych a obwodami lokalnego oscylatora. Zwykle w obu występują obwody oscylacyjne. Jeśli istnieje połączenie między nimi, występuje wpływ jednego obwodu na drugi, naruszenie ich prawidłowego dostrojenia, pogorszenie stabilności częstotliwości lokalnego oscylatora oraz, w przypadku braku wzmacniacza wysokiej częstotliwości, fałszywe promieniowanie lokalne oscylacje oscylatora i przy braku wzmacniacza wysokiej częstotliwości, pasożytnicze promieniowanie lokalnych oscylatorów przez antenę odbiorczą. Podczas korzystania z triody napięcia sygnału i LO są podawane do obwodu sieci, co powoduje znaczne sprzężenie między obwodami sygnału i LO. Podobna metoda konwersji częstotliwości nazywa się pojedyncza siatka. Osłabienie sprzężenia między sygnałem a lokalnymi obwodami oscylatora uzyskuje się przez konwersję częstotliwości z podwójną siatką, co można zrobić za pomocą pentody, jeśli jest używana jako lampa z podwójnym napędem. W tym przypadku w przepływie elektronów wewnątrz lampy dochodzi do dodawania sygnału i lokalnych oscylacji oscylatora, ponieważ oscylacje są przyłożone do różnych siatek. Napięcie sygnału jest dostarczane do siatki sterującej, a napięcie lokalnego oscylatora jest podawane do siatki ochronnej, która jest używana jako druga siatka kontrolna. Jeśli napięcie tej siatki pozostaje znacznie poniżej minimalnego napięcia anodowego, to nadal działa jako siatka ochronna. Siatka ekranująca prawie całkowicie eliminuje pasożytnicze sprzężenie pojemnościowe między sygnałem a lokalnymi obwodami oscylatora. Lampa, w której przeprowadzana jest konwersja częstotliwości, jest czasami nazywana mieszanie, ponieważ dodawane są w nim dwie wibracje o różnych częstotliwościach, a kaskada, w której działa ta lampa, nazywa się mikser. Tak więc konwersja częstotliwości składa się z miksera i lokalnego oscylatora, z których każdy musi mieć własną lampę. Podwójnie sterowane lampy wieloelektrodowe do konwersji częstotliwości - heptody - mają dwie siatki sterujące i pracują jednocześnie w mikserze i lokalnym oscylatorze, czyli zastępują dwie lampy, są stosowane w odbiornikach fal średnich i krótkich, ale działają słabo na VHF. Heptoda ma pięć siatek. Zaletą heptod jest obecność siatki ochronnej, dzięki której wzrasta wewnętrzna rezystancja lampy. Gdy heptody działają na długościach fal krótszych niż 20 m, stabilność częstotliwości oscylatora lokalnego okazuje się niewystarczająca i konieczne jest zastosowanie lokalnego oscylatora z osobną lampą, czyli wykorzystanie tylko heptody jako miksera, a nie konwertera lampa. Na tych falach najlepsze wyniki w przetwornicach częstotliwości dają pentody i triody. 39. CHARAKTERYSTYKA I PARAMETRY LAMP Z PODWÓJNYM STEROWANIEM Wszystkie lampy wielorusztowe z podwójnym sterowaniem mają siatkę ekranującą i są podobne do pentod lub tetrod, do których dodaje się więcej siatek, tworząc część triodową (heterodynową). Pod względem charakterystyki i parametrów lampy te są zbliżone do pentod i tetrod, a pod względem charakterystyki i parametrów części triodowej do zwykłych triod. Ponadto podwójne lampy kontrolne mają dodatkowe cechy i parametry ze względu na obecność dwóch siatek kontrolnych. Prąd anodowy wzrasta wraz z dodatnią zmianą napięć obu sieci. Nachylenie wzdłuż pierwszej siatki jest tym większe, im wyższe jest napięcie sieci. Jeżeli napięcie zmienia się w kierunku dodatnim, wówczas bariera potencjału na katodzie zmniejsza się i coraz więcej elektrod pokonuje tę barierę. Odpowiednio wzrasta prąd katodowy, prąd anodowy i prąd siatki ekranującej. Wraz ze zmianą napięcia zmienia się rozkład prądu między anodą a siatką, podobnie jak w pentodzie, gdy zmienia się napięcie jej siatki ochronnej. Dualne sterowanie prądem anodowym sprowadza się do tego, że zmiana napięcia jednej siatki sterującej zmienia nachylenie charakterystyki drugiej siatki sterującej. Ze względu na zmianę nachylenia – głównego parametru charakteryzującego działanie kontrolne sieci, pod wpływem napięcia innej sieci kontrolnej, lampa jest urządzeniem parametrycznym przystosowanym do konwersji częstotliwości. Proces konwersji częstotliwości w podwójnej lampie kontrolnej można wyjaśnić za pomocą rodziny charakterystyk heptodowych. Ponieważ obwód oscylacyjny anody jest dostrojony do częstotliwości pośredniej i ma niską rezystancję przy częstotliwościach sygnału i lokalnego oscylatora, lampa praktycznie działa w trybie bez obciążenia dla oscylacji tych częstotliwości, a zmiany prądu anodowego są określane na podstawie charakterystyk statycznych. Najważniejszym parametrem charakteryzującym lampy konwertujące częstotliwość jest stromość konwersji. Przedstawia stosunek amplitudy pierwszej harmonicznej składowej zmiennej częstotliwości pośredniej, uzyskanej w prądzie anodowym, do amplitudy napięcia sygnału. W tym przypadku napięcia na siatkach ekranujących i ochronnych oraz anodzie są stałe. Stromość konwersji wzrasta wraz ze wzrostem amplitudy napięcia lokalnego oscylatora. Wiele lamp przetwarzających częstotliwość ma rozszerzone charakterystyki do automatycznej kontroli wzmocnienia stopnia przetwarzania. Ale wtedy, gdy odbierane są silne sygnały, tj. gdy punkt pracy jest przesunięty do dolnych nieliniowych odcinków charakterystyki, amplitudy oscylacji kombinacji gwałtownie rosną, co może być przyczyną zakłóceń w odbiorniku. W nowoczesnym sprzęcie stosuje się lampy kombinowane, mające dwa, a czasem trzy lub cztery oddzielne układy elektrod w jednym cylindrze. Zastosowanie takich lamp zmniejsza gabaryty sprzętu i upraszcza instalację. Dla uproszczenia na schematycznych przedstawieniach połączonych lamp często pokazano tylko jeden grzejnik i jedną katodę. W wielu lampach, szczególnie tych przeznaczonych do wysokich częstotliwości, montuje się ekrany eliminujące pasożytnicze sprzężenie pojemnościowe pomiędzy poszczególnymi układami elektrod. Konstrukcja elektrod połączonych lamp jest inna. Często istnieją oddzielne systemy elektrod z ekranem. W niektórych lampach wykonuje się wspólną katodę, a przepływy elektronów pochodzące z różnych części jej powierzchni są wykorzystywane w każdym własnym układzie elektrod. Istnieje możliwość zainstalowania systemów elektrod z ekranami separującymi wzdłuż wspólnej katody. 40. SPECJALNE TYPY LAMP ODBIOROWYCH I WZMACNIAJĄCYCH Rosnąca stromość uzyskuje się poprzez zmniejszenie odległości „siatka-katoda” do kilkudziesięciu mikronów. Ale produkcja lamp o małej odległości „siatka - katoda” jest trudna i niewystarczająco niezawodna, ponieważ istnieje niebezpieczeństwo zamknięcia siatki z nierówną powierzchnią katody tlenkowej. Innym sposobem zwiększenia stromości jest zastosowanie siatki katodowej umieszczonej pomiędzy siatką kontrolną a katodą i posiadającej pewien potencjał dodatni. Elektrony emitowane przez katodę są przyspieszane przez siatkę katodową, wlatują w jej szczeliny i tworzą obszar o zwiększonej gęstości ładunku przestrzennego oraz drugą barierę potencjału w bardzo małej odległości od siatki sterującej. Napięcie sieci sterującej bardzo silnie wpływa na jej wysokość. W rezultacie siatka kontrolna może bardzo skutecznie kontrolować przepływ elektronów. Znaczący wzrost nachylenia uzyskuje się w lampach z emisją wtórną. Badania nad wykorzystaniem emisji wtórnej w lampach prowadzone są od dawna, jednak przez długi czas nie było możliwe zaprojektowanie takich lamp, które pracowałyby stabilnie i nie wytwarzały zbyt dużego szumu własnego. Przyczyną tych odgłosów jest nierównomierność procesu emisji wtórnej. Znaleziono nowe stopy metali ciężkich z lekkimi, jak miedź z berylem, które dają wysoką i stabilną emisję wtórną. Podczas ich stosowania szumy są redukowane, choć i tak są większe niż w konwencjonalnych lampach. Lampy z emisją wtórną posiadają dodatkową elektrodę - katodę emisji wtórnej (dynodę). Do niej przykładany jest dodatni potencjał, mniejszy niż do anody. Elektrony pierwotne wylatujące z katody uderzają w katodę emisji wtórnej i wybijają z niej elektrony wtórne, które lecą do anody, która ma wyższy potencjał dodatni. Przepływ elektronów wtórnych jest kilkakrotnie większy niż przepływ elektronów wtórnych. Dlatego nachylenie lampy jest wysokie. Prąd katody emisji wtórnej jest nieco mniejszy niż prąd anodowy i w zewnętrznej części obwodu ma kierunek przeciwny do prądu anodowego. Nachylenie lampy pod względem prądu wtórnej katody emisji jest zwykle nieco mniejsze niż nachylenie pod względem prądu anodowego. Elektrony prądu anodowego poruszają się wzdłuż przewodu zewnętrznej części obwodu anodowego od anody, a elektrony prądu wtórnej katody emisji w obwodzie zewnętrznym poruszają się w kierunku tej katody, ponieważ wewnątrz lampy wychodzi więcej elektronów wtórnych niż pierwsi do niego przychodzą. Po przyłożeniu do sieci napięcia przemiennego, ze względu na przeciwne kierunki prądów anody i wtórnej katody emisyjnej, rezystory obciążenia zawarte w obwodach tych elektrod otrzymują wzmocnione napięcia przemienne, które są w przeciwfazie. Normalny stopień wzmocnienia odwraca fazę napięcia. A w obwodzie wtórnej katody emisyjnej uzyskuje się wzmocnione napięcie, które pokrywa się w fazie z napięciem przemiennym sieci. Właściwość ta bardzo ułatwia wprowadzenie dodatniego sprzężenia zwrotnego między obwodami wtórnej katody emisyjnej a siatką sterującą w celu generowania oscylacji o różnych kształtach, zwiększenia wzmocnienia, zmniejszenia szerokości pasma przesyłanych oscylacji oraz do innych celów. Produkowane są subminiaturowe odbiorcze-wzmacniające triody metalowo-ceramiczne i tetrody, zwane nuwistorzy. Są przeznaczone do wzmacniania, generowania i przekształcania częstotliwości. Posiadają miniaturowy walec ceramiczno-metalowy. 41. RODZAJE WYŁADUNKU ELEKTRYCZNEGO W GAZACH Rozróżnić niezależne i niesamodzielne wyładowania w gazie. samorozładowanie obsługiwane tylko przez napięcie elektryczne. Nie-samorozładowanie mogą istnieć pod warunkiem, że oprócz napięcia elektrycznego istnieją inne zewnętrzne czynniki jonizujące. Mogą to być promienie świetlne, promieniowanie radioaktywne, emisja termionowa rozgrzanej elektrody itp. Rozważmy główne rodzaje wyładowań elektrycznych spotykanych w urządzeniach jonowych. Ciemne (lub ciche) wyładowanie nie jest samowystarczalne. Charakteryzuje się gęstością prądu rzędu mikroamperów na centymetr kwadratowy i bardzo niską objętościową gęstością ładunku. Pole wytworzone przez przyłożone napięcie praktycznie nie zmienia się podczas ciemnego wyładowania z powodu ładunków kosmicznych, tj. ich wpływ można pominąć. Nie ma blasku gazu. W urządzeniach jonowych do elektroniki radiowej nie stosuje się ciemnego wyładowania, ale poprzedza ono pojawienie się innych rodzajów wyładowań. Wyładowanie jarzeniowe odnosi się do niezależnego. Charakteryzuje się blaskiem gazu, przypominającym blask tlącego się ciała. Gęstość prądu podczas tego wyładowania dochodzi do jednostek i dziesiątek miliamperów na centymetr kwadratowy i uzyskuje się ładunki przestrzenne, które znacząco wpływają na pole elektryczne między elektrodami. Napięcie wymagane do wyładowania jarzeniowego wynosi dziesiątki lub setki woltów. Wyładowanie jest utrzymywane dzięki emisji elektronów katody pod wpływem jonów. Głównymi urządzeniami do wyładowań jarzeniowych są diody Zenera - jonowe stabilizatory napięcia, lampy gazowe, tyratrony jarzeniowe, cyfrowe lampki kontrolne i dekatrony - liczniki jonów. Wyładowanie łukowe uzyskuje się przy gęstościach prądu znacznie wyższych niż w wyładowaniu jarzeniowym. Niesamodzielne urządzenia do wyładowań łukowych obejmują gastrony i tyratrony z gorącą katodą; w zaworach rtęciowych (exitronach) i zapłonnikach z katodą ciekłej rtęci, a także w wyładowaczach gazowych występuje niezależne wyładowanie łuku. Wyładowanie łuku może odbywać się nie tylko przy obniżonym, ale również przy normalnym lub podwyższonym ciśnieniu atmosferycznym. Wyładowanie iskrowe jest podobne do wyładowania łukowego. Jest to krótkotrwałe (impulsowe) wyładowanie elektryczne przy stosunkowo wysokim ciśnieniu gazu, na przykład przy normalnym ciśnieniu atmosferycznym. Zwykle w iskrze obserwuje się serię impulsowych wyładowań następujących po sobie. Wyładowania o wysokiej częstotliwości mogą wystąpić w gazie pod działaniem zmiennego pola elektromagnetycznego nawet przy braku elektrod przewodzących prąd (wyładowanie bezelektrodowe). Wyładowanie koronowe jest niezależne i jest stosowane w urządzeniach jonowych do stabilizacji napięcia. Obserwuje się to przy stosunkowo wysokich ciśnieniach gazu w przypadkach, gdy co najmniej jedna z elektrod ma bardzo mały promień krzywizny. Następnie pole między elektrodami okazuje się niejednorodne, a w pobliżu elektrody szpiczastej, zwanej koroną, siła pola gwałtownie wzrasta. Wyładowanie koronowe występuje przy napięciu rzędu setek lub tysięcy woltów i charakteryzuje się niskimi prądami. 42. ROZŁADOWANIE ŚWIATŁA Rozważ wyładowanie jarzeniowe między płaskimi elektrodami. W przypadku braku wyładowania, gdy nie ma wyładowań objętościowych, pole jest jednorodne, a potencjał między elektrodami rozkłada się zgodnie z prawem liniowym. W urządzeniu elektronicznym (próżniowym), w obecności emisji, występuje ujemny ładunek przestrzenny, który tworzy potencjalną barierę w pobliżu katody. Bariera ta zapobiega generowaniu dużego prądu anodowego. W urządzeniu z wyładowaniem jarzeniowym duża liczba jonów dodatnich tworzy dodatni ładunek przestrzenny. Powoduje to zmianę potencjału w przestrzeni „anoda – katoda” w kierunku dodatnim. W urządzeniu jonowym rozkład potencjału jest taki, że prawie całe napięcie anodowe spada w cienkiej warstwie gazu w pobliżu katody. Ten obszar nazywa się katodowa część szczeliny wyładowczej. Jego grubość nie zależy od odległości między elektrodami. W pobliżu katody powstaje silne pole przyspieszające. Anoda niejako zbliża się do katody. Rolę anody spełnia chmura jonów z ładunkiem dodatnim „zawieszona” nad katodą. W rezultacie efekt ujemnego ładunku przestrzennego jest kompensowany i nie ma potencjalnej bariery w pobliżu katody. Druga część szczeliny wyładowczej charakteryzuje się niewielkim spadkiem napięcia. Siła pola w nim jest niewielka. Nazywa się to obszarem plazmy gazowej lub elektronowo-jonowej. Oddzielona jest od niej część przylegająca do anody i spowodowana przez anodową część szczeliny wyładowczej, czyli obszar spadku potencjału anodowego. Obszar pomiędzy katodą a anodą nazywany jest kolumną wyładowczą. Część anodowa nie jest ważna, a kolumnę wyładowczą i część anodową można traktować jako jeden obszar plazmy. Plazma jest silnie zjonizowanym gazem, w którym liczba elektronów i jonów jest prawie taka sama. W plazmie losowy ruch cząstek dominuje nad ich ruchem kierunkowym. Ale mimo to elektrony poruszają się w kierunku anody, a jony w kierunku katody. Siły pola działające na elektrony i jony są takie same i mają tylko przeciwny kierunek, ponieważ ładunki tych cząstek są równe, ale przeciwne pod względem znaku. Ale masa jonu jest tysiące razy większa niż masa elektronu. Dlatego jony uzyskują odpowiednio mniejsze przyspieszenia i uzyskują stosunkowo małe prędkości. W porównaniu z elektronami jony są prawie nieruchome. Dlatego prąd w urządzeniach jonowych jest praktycznie ruchem elektronów. Część prądu jonów jest bardzo mała i można ją zignorować. Jony wykonują swoją pracę. Tworzą dodatni ładunek kosmiczny, który znacznie przewyższa ujemny ładunek kosmiczny i niszczy potencjalną barierę w pobliżu katody. Ważną rolę odgrywa obszar napięcia katodowego. Jony, które przeniknęły do tego obszaru z plazmy, ulegają tu przyspieszeniu. Uderzając z dużą prędkością w katodę, jony wybijają z niej elektrony. Ten proces jest niezbędny do utrzymania rozładowania. Jeśli prędkość jonów jest niewystarczająca, emisja elektronów nie będzie działać i wyładowanie ustanie. Elektrony uciekające z katody są również przyspieszane w obszarze opadania katody i wpadają do plazmy z prędkością znacznie większą niż jest to konieczne do jonizacji atomów gazu. Elektrony zderzają się z atomami gazu w różnych częściach plazmy. Dlatego jonizacja odbywa się w całej objętości. Rekombinacja zachodzi również w plazmie. Tylko niewielka część jonów, które powstały w plazmie, uczestniczy w tworzeniu emisji elektronowej katody. Większość jonów rekombinuje z elektronami i nie dociera do katody. 43. STABILITERY Urządzenia jarzeniowe lub wyładowania koronowe są diody Zenera. Najczęściej stosowane diody Zenera z wyładowaniem jarzeniowym działają w normalnym trybie napięcia katodowego. Ponieważ ciemne wyładowanie poprzedzające wyładowanie jarzeniowe nie jest używane, nie jest interesujące, nie jest pokazane na charakterystyce woltamperowej diody Zenera. Punkt wyładowania jest pokazany na osi pionowej. W praktyce tak jest, ponieważ miliamperomierz do pomiaru prądu wyładowania jarzeniowego nie pokaże pomijalnego prądu ciemnego wyładowania. Obszar normalnego opadania katody nadający się do stabilizacji jest ograniczony przez minimalne i maksymalne prądy. Przy prądzie mniejszym niż minimum wyładowanie może się zatrzymać. Maksymalny prąd albo odpowiada początkowi anomalnego trybu opadania katody, albo osiąga się ograniczające nagrzewanie elektrod. Udar prądu podczas wyładowania może być różny w zależności od rezystancji rezystora. Jeśli jest duży, pojawia się stosunkowo mały prąd, a jeśli weźmiemy mały, powstaje duży prąd. Dla stabilizacji jest to niekorzystne, ponieważ obszar stabilizacji napięcia jest zmniejszony. Przy niskiej rezystancji skok prądu może nawet wystąpić w obszarze anomalnego spadku katody, a stabilizacja w ogóle nie zadziała. Zatem rezystor ograniczający o wystarczającej rezystancji jest niezbędny z dwóch powodów: aby nie wystąpił nadmierny wzrost prądu (zwarcie) i aby mógł istnieć tryb stabilizacji napięcia. Im większy obszar katody, tym szerszy obszar stabilizacji uzyskuje się, ponieważ minimalny prąd pozostaje niezmieniony, a maksymalny prąd wzrasta proporcjonalnie do obszaru katody. Dlatego diody Zenera charakteryzują się katodą o dużej powierzchni. Anoda ma niewielkie rozmiary, ale nie powinna się przegrzewać z maksymalnego prądu. Najczęściej spotykane dwuelektrodowe diody Zenera z wyładowaniem jarzeniowym z cylindryczną katodą wykonaną z niklu lub stali. Anoda to drut o średnicy 1-1,5 mm. Balon wypełniony jest mieszaniną gazów obojętnych (neon, argon, hel) pod ciśnieniem kilkudziesięciu milimetrów słupa rtęci. Parametry diody Zenera to: normalne napięcie pracy lub napięcie stabilizacji odpowiadające punktowi środkowemu obszaru stabilizacji, napięcie inicjacji rozładowania, prąd minimalny i maksymalny, zmiana napięcia stabilizacji oraz rezystancja wewnętrzna na prąd przemienny. Stosując różne mieszaniny gazów dobiera się żądaną wartość napięcia stabilizacji. Diody Zenera z wyładowaniami koronowymi charakteryzują się wysokimi napięciami i niskimi prądami. W takich diodach Zenera elektrody cylindryczne są wykonane z niklu. Butla wypełniona jest wodorem, a napięcie stabilizacji zależy od ciśnienia gazu. Prądy robocze mieszczą się w zakresie 3-100 μA. Wewnętrzna rezystancja prądu przemiennego tych diod Zenera wynosi setki kiloomów. Proces rozładowania diod Zenera wyładowań koronowych trwa 15-30 sekund. Diody Zenera najczęściej pracują w trybie, w którym rezystancja obciążenia jest stała, a napięcie źródła jest niestabilne. Aby ustabilizować wyższe napięcia, diody Zenera są połączone szeregowo, zwykle nie więcej niż dwa lub trzy. Mogą być dla różnych napięć, ale dla tych samych prądów minimalnych i maksymalnych. 44. TRONY GAZOWE Gasotrony - Są to diody jonowe z niesamodzielnym wyładowaniem łukowym, które jest podtrzymywane przez termionową emisję katody. Zadaniem gastronów jest prostowanie prądu przemiennego. Obecnie stosuje się gastrony z gazem obojętnym w postaci argonu lub mieszaniny ksenonowo-kryptonowej o ciśnieniu rzędu kilku milimetrów rtęci. Większość gastronów ma katodę tlenkową bezpośredniego lub pośredniego ogrzewania. W mocniejszych gastronach ma znaczną powierzchnię. Anoda w postaci dysku, półkuli lub cylindra ma stosunkowo niewielkie rozmiary. Gasotrony charakteryzują się niskim napięciem żarnika, nie większym niż 5 V. W przypadku przyłożenia wyższego napięcia może dojść do wyładowania łukowego między końcami grzałki, co zmarnuje energię źródła żarnika. Przy niskim napięciu grzewczym katody potężnych gastronów muszą być zasilane dużym prądem. Przewaga gastronów nad kenotronami polega na niskim spadku napięcia w samym gastronie. Jest to około 15-20 V i prawie nie zależy od prądu anodowego. Dlatego sprawność prostowników gastronowych jest wyższa niż prostowników kenotronowych i jest tym większa, im wyższe jest wyprostowane napięcie. W prostownikach wysokonapięciowych na gastronach sprawność może wynosić do 90% lub więcej. Zanim nastąpi wyładowanie, w gastronie obserwuje się prąd elektronowy, który rośnie wraz ze wzrostem napięcia, podobnie jak w diodzie próżniowej. Ten prąd jest bardzo mały i nie ma praktycznego znaczenia. Wystąpienie wyładowania łukowego uzyskuje się przy napięciu nieco większym niż potencjał jonizacji. Ponieważ gastron jest koniecznie włączany przez rezystor ograniczający, po rozpoczęciu rozładowania pojawia się spadek napięcia na rezystorze i napięcie na gastronie nieznacznie spada. Wraz ze wzrostem napięcia źródła prąd w gastronie wzrasta, a spadek napięcia na nim nieznacznie się zmienia, chociaż nie pozostaje stały, jak w diodach Zenera. Stosowanie gastronu do stabilizacji nie wchodzi w rachubę, gdyż nieopłacalne jest uzyskanie niskiego napięcia przy znacznym wydatku energii na podgrzanie gastronu. Napięcie robocze na gastronie jest tego samego rzędu co potencjał jonizacji, czyli 15-25 V. Względną stałość napięcia na gastronie uzyskuje się nie z powodu reżimu napięcia katody, który jest charakterystyczny dla urządzeń z wyładowaniem jarzeniowym. W gastronach powierzchnia katody nie zmienia się, ale wraz ze wzrostem prądu rezystancja urządzenia na prąd stały maleje, ponieważ jonizacja i odpowiednio liczba elektronów i jonów na jednostkę objętości wzrasta. Ponadto dodatni ładunek przestrzenny jonów zbliża się do katody, co jest równoznaczne ze zmniejszeniem odległości „anoda-katoda”. W gastronie rozkład potencjału w przestrzeni „anoda-katoda” jest w przybliżeniu taki sam jak w urządzeniach z wyładowaniem jarzeniowym, ale napięcie anodowe jest niższe i w pobliżu katody występuje bariera potencjału, jak w lampach elektronowych. Katoda w gastronie pracuje w trudnych warunkach ze względu na bombardowanie jonami dodatnimi. Przy stosunkowo dużej masie jony niszczą warstwę tlenkową, jeśli ich prędkość przekracza dopuszczalną wartość. 45. TYRATRONY WYŁADOWCZE ŁUKU tyratrony z gorącą katodą, Działając jak gastrony w trybie wyładowania łukowego, są one używane do prostowania prądu przemiennego oraz jako przekaźniki w automatyce, telekontroli, technologii impulsowej, radarze i innych obszarach. W wielu właściwościach i konstrukcji tyratrony są podobne do gastronów, ale siatka pozwala kontrolować wielkość napięcia inicjacji rozładowania. Siatka w tyratronach musi być taka, aby wyładowanie przechodziło tylko przez nią, a nie okrężną drogą. Dlatego sama siatka lub w połączeniu z ekranem termicznym zakrywa katodę prawie ze wszystkich stron. Część robocza siatki wykonana jest z kilku otworów, a reszta to ekran. W niektórych tyratronach małej mocy konstrukcja elektrod jest prawie taka sama jak w przypadku lamp próżniowych. Katoda i anoda w tyratronie działają tak samo jak w gastronie. Cechy działania i zasada działania gastronów w pełni dotyczą tyratronów. Rolą siatki w tyratronie jest utrzymywanie tyratronu w stanie zablokowanym przy dodatnim napięciu anodowym przy wykorzystaniu ujemnego napięcia siatki. A wraz ze spadkiem tego napięcia lub wzrostem napięcia anodowego następuje wyładowanie, tj. Tyratron zostaje odblokowany. Im większe jest ujemne napięcie sieci, tym wyższe napięcie anodowe powoduje wyładowanie. Wyjaśnia to fakt, że przy ujemnym napięciu siatki w szczelinie „siatka-katoda” powstaje bariera o wysokim potencjale dla elektronów emitowanych przez katodę. Elektrony nie będą w stanie pokonać tej bariery i polecieć do anody. Zmniejszenie ujemnego potencjału sieci lub zwiększenie napięcia anodowego obniża barierę potencjału. Gdy elektrony zaczynają ją pokonywać, przemieszczają się w kierunku anody, nabierają prędkości niezbędnej do jonizacji, proces jonizacji narasta lawinowo i następuje wyładowanie łukowe. Zależność między napięciem anodowym wystąpienia wyładowania a napięciem sieciowym przedstawia charakterystykę rozruchową lub charakterystykę zapłonu. Jest usuwany przy użyciu tego samego obwodu, co do badania triody próżniowej, ale z rezystorem ograniczającym w obwodzie anodowym. Łatwiej to zdjąć. Dla każdego punktu napięcie anodowe jest najpierw ustawiane na zero i pewne ujemne napięcie sieci. Następnie napięcie anodowe jest zwiększane i jego wartość jest odnotowywana w momencie wystąpienia wyładowania. Następnie napięcie anodowe jest obniżane do zera, następny punkt jest usuwany itp. Z charakterystyki rozruchowej wynika, że wraz ze wzrostem ujemnego napięcia sieci wzrasta napięcie anodowe, co jest niezbędne do wystąpienia rozładowania. Charakterystyki rozruchowe podczas pracy tyratronu z napięciem przemiennym różnią się nieco od charakterystyk rozruchu statycznego przy prądzie stałym. Wynika to z faktu, że przy napięciu przemiennym oddziałuje prąd sieciowy wstępnego rozładowania (przed rozruchem). Wynika to z faktu, że podczas ujemnego półcyklu, gdy tyratron jest zablokowany, rekombinacja nie zachodzi natychmiast, a między elektrodami znajdują się elektrony i jony. Powoduje to wystąpienie odwróconego prądu anodowego. Jednocześnie jony dodatnie są przyciągane do ujemnie naładowanej siatki, tworząc w jej obwodzie prąd wstępnego rozładowania. Emisja termionowa siatki może również odgrywać rolę w tworzeniu prądu wstępnego rozładowania. Im większy prąd anodowy i im wyższa częstotliwość, tym silniejszy prąd rozładowania wstępnego. Obecność takiego prądu ułatwia zapłon tyratronu. 46. RURKA CATHOTRON RAY Urządzenia katodowe obejmują lampy elektronopromieniowe do oscylografii, urządzenia do odbioru obrazu telewizyjnego i urządzenia wskazujące radary, do transmisji obrazu telewizyjnego, lampy pamięciowe do komputerów elektronicznych, przełączniki wiązki katodowej i inne urządzenia. Wszystkie te urządzenia wytwarzają cienką wiązkę elektronów (wiązkę), kontrolowaną przez pole elektryczne lub magnetyczne, lub oba pola. Rury mogą być z ogniskowaniem wiązki elektronów za pomocą pola elektrycznego lub magnetycznego oraz z elektrycznym lub magnetycznym odchylaniem wiązki. W zależności od koloru obrazu na ekranie luminescencyjnym dostępne są tubusy o poświacie zielonej, pomarańczowej lub żółto-pomarańczowej – do obserwacji wzrokowej, niebieskie – do fotografowania oscylogramów, białe lub trójkolorowe – do odbioru obrazu telewizyjnego. Lampy elektronopromieniowe sterowane elektrostatycznie, czyli z ogniskowaniem i odchylaniem wiązki przez pole elektryczne, zwane w skrócie rury elektrostatyczne, szczególnie szeroko stosowany w oscyloskopach. Rura balonowa ma kształt cylindryczny z przedłużeniem w kształcie stożka, a czasem w kształcie walca. Na wewnętrzną powierzchnię podstawy rozszerzonej części nakładany jest ekran luminescencyjny - warstwa substancji zdolnych do świecenia pod wpływem uderzeń elektronów. Wewnątrz rurki znajdują się elektrody z wyprowadzeniami do pinów podstawy. Katoda jest zwykle pośrednio ogrzewanym tlenkiem w postaci cylindra z grzałką. Zacisk katody jest czasami łączony z jednym zaciskiem grzejnika. Warstwa tlenku osadza się na dnie katody. Wokół katody znajduje się elektroda kontrolna, zwana modulatorem, o cylindrycznym kształcie z otworem w dnie. Ta katoda służy do kontrolowania gęstości wiązki elektronów i jej wstępnego ogniskowania. Do modulatora podawane jest ujemne napięcie. Wraz ze wzrostem tego napięcia coraz więcej elektronów powraca do katody. Przy pewnym ujemnym napięciu modulatora lampa jest zablokowana. Kolejne elektrody, również cylindryczne, są anodami. W najprostszym przypadku są tylko dwa. Na drugiej anodzie napięcie wynosi od 500 V do kilku kilowoltów, a na pierwszej anodzie napięcie jest kilkakrotnie mniejsze. Wewnątrz anod znajdują się zwykle przegrody z otworami (przesłony). Pod działaniem przyspieszającego pola anod elektrony nabierają znacznej prędkości. Ostateczne ogniskowanie przepływu elektronów odbywa się za pomocą niejednorodnego pola elektrycznego w przestrzeni między anodami, a także dzięki przesłonom. Bardziej złożone systemy ogniskowania składają się z większej liczby cylindrów. System składający się z katody, modulatora i anod nazywany jest reflektorem elektronowym (działem elektronowym) i służy do tworzenia wiązki elektronów, czyli cienkiego strumienia elektronów lecącego z dużą prędkością od drugiej anody do ekranu luminescencyjnego. Odchylenie wiązki elektronów i plamki świetlnej na ekranie jest proporcjonalne do napięcia na płytkach odchylających. Nazywa się współczynnik proporcjonalności w tej zależności czułość lampy. 47. CECHY DZIAŁANIA LAMP W ULTRA WYSOKICH CZĘSTOTLIWOŚCIACH Działają lampy na fale średnie i krótkie niezadowalający w kuchence mikrofalowej, co wyjaśniają następujące powody. Wpływ pojemności międzyelektrodowych i indukcyjności ołowiu. Pojemności i indukcyjności mają duży wpływ na działanie lamp w zakresie mikrofalowym. Zmieniają parametry systemów oscylacyjnych podłączonych do lampy. W rezultacie częstotliwość drgań własnych układów oscylacyjnych spada i dostrojenie ich do częstotliwości powyżej pewnej granicy staje się niemożliwe. Każda lampa charakteryzuje się pewną częstotliwością graniczną, która odpowiada częstotliwości rezonansowej obwodu oscylacyjnego wynikającego ze zwarcia przewodów od elektrod lampy. Indukcyjności ołowiu i pojemności międzyelektrodowe, gdy są zawarte w niektórych obwodach lamp, tworzą niepożądane dodatnie lub ujemne sprzężenie zwrotne i przesunięcia fazowe, które pogarszają działanie obwodu. Szczególnie dotyczy to indukcyjności końcówki katody. Wchodzi jednocześnie w obwody anodowe i siatkowe i wytwarza znaczne sprzężenie zwrotne, w wyniku czego zmienia się tryb pracy i zmniejsza się impedancja wejściowa lampy, na którą obciążone jest źródło wzmocnionego napięcia przemiennego. Pojemności międzyelektrodowe również pomagają zmniejszyć rezystancję wejściową lampy. Ponadto te pojemności, mające bardzo małą rezystancję przy częstotliwościach mikrofalowych, mogą powodować pojawianie się znacznych prądów pojemnościowych w mocniejszych lampach, nagrzewając wyprowadzenia z elektrod i powodując dodatkowe straty energii. Wpływ bezwładności elektronów. Ze względu na to, że elektrony mają masę, nie mogą natychmiast zmienić swojej prędkości i błyskawicznie pokonywać odległość między elektrodami. Lampa przestaje być urządzeniem bezinercyjnym lub o małej bezwładności. W kuchence mikrofalowej przejawia się bezwładność elektronów. Bezwładność procesów elektronicznych w lampie powoduje szkodliwe przesunięcia fazowe, zniekształca kształt impulsów prądu anodowego i powoduje powstawanie znacznych prądów siatki. Rezultatem jest gwałtowny spadek rezystancji wejściowej lampy, wzrost strat energii w lampie, a także spadek mocy użytecznej. Rozważając działanie lamp, dla uproszczenia uważa się, że prąd w obwodzie elektrody powstaje w wyniku przepływu elektronów lecących wewnątrz lampy na tę elektrodę. Ten przepływ elektronów nazywa się prądem konwekcyjnym. Prąd w obwodzie zewnętrznym dowolnej elektrody lampy jest prądem indukowanym (indukcyjnym). W lampach elektronowych rolę poruszającego się ładunku indukcyjnego odgrywa przepływ elektronów przelatujących od jednej elektrody do drugiej, czyli prąd konwekcyjny. Prądy konwekcyjne wewnątrz lampy zawsze wzbudzają prądy indukowane w zewnętrznych przewodach podłączonych do elektrod lampy. Indukowany prąd wzrasta wraz ze wzrostem liczby i prędkości latających elektronów, a także ze spadkiem odległości między nimi a tą elektrodą. Za pomocą indukowanego prądu można lepiej zrozumieć konwersję energii zachodzącą, gdy elektrony poruszają się w polu elektrycznym. Przepływ elektronów lecących wewnątrz lampy wytwarza w obwodzie akumulatora indukowany prąd, którego kierunek pokrywa się z kierunkiem prądu konwekcyjnego. W przypadku pola przyspieszającego indukowany prąd przepływający przez akumulator będzie dla niego prądem rozładowania. Bateria jest rozładowana, tzn. zużywa swoją energię, która za pomocą pola elektrycznego przekazywana jest lecącym elektronom i zwiększa ich energię kinetyczną. W polu zwalniającym elektrony poruszają się ze względu na ich energię początkową. W tym przypadku prąd indukowany, przeciwnie, będzie prądem ładowania akumulatora, tj. elektrony w polu opóźniającym oddają swoją energię, która jest nagromadzona w akumulatorze. 48. REZYSTANCJA WEJŚCIOWA I STRATY MOCY W LAMPACH Stopień wzmacniający charakteryzuje się wzmocnieniem mocy K, pokazującym, ile razy moc jest wzmacniana: K \uXNUMXd Pout / Pin, gdzie Pout to użyteczna moc wyjściowa lampy, a Pin to moc dostarczona do wejścia lampy. Przy małej wartości rezystancji wejściowej moc może wzrosnąć tak bardzo, że współczynnik staje się równy jeden lub nawet mniej. Oczywiście niewłaściwe jest stosowanie wzmacniaczy, które zapewniają wzmocnienie mocy mniej niż 2-3 razy. Wraz z przejściem na mikrofale impedancja wejściowa konwencjonalnych lamp gwałtownie spada, a zysk mocy jest niewielki lub nawet nieobecny. Spadek rezystancji wejściowej lamp mikrofalowych tłumaczy się występowaniem prądów indukowanych w obwodzie sieci. W zależności od stosunku czasu przelotu do okresu oscylacji, stosunku odległości odcinków „katoda – siatka” i „siatka – anoda”, wielkości napięć na elektrodach, procesy w triodzie mogą występują inaczej, ale nadal, w każdym przypadku, ze względu na manifestację bezwładności elektronów w kuchence mikrofalowej, duże indukowane prądy w obwodzie sieci, co prowadzi do gwałtownego spadku rezystancji wejściowej. Najbardziej nieprzyjemną konsekwencją bezwładności procesów elektronicznych jest pojawienie się aktywnego składnika prądu sieciowego. Powoduje to, że lampa posiada wejściową rezystancję czynną, która maleje wraz ze wzrostem częstotliwości i zmniejsza przyrost mocy. Aktywna rezystancja wejściowa lampy charakteryzuje straty energii źródła oscylacji zawartego w obwodzie sieci. W tym przypadku energia ta jest przekazywana przez aktywny składnik indukowanego prądu ze źródła oscylacji do pola elektrycznego i przekazywana do elektronów, które zwiększają swoją energię kinetyczną i zużywają ją na nagrzewanie anody. Jeśli 1 lampa pracuje przy niższych częstotliwościach i można pominąć czas przelotu, wtedy przy napięciu sieci prądy będą miały taki sam prostokątny kształt i czas trwania jak napięcie i nie będą przesunięte w czasie względem siebie. Ponieważ prądy te są równe i przeciwne, całkowity prąd sieci wynosi zero. W konsekwencji nie ma w tym przypadku zużycia energii ze źródła oscylacji. Przy sinusoidalnym napięciu przemiennym wszystkie procesy są bardziej skomplikowane, ale w kuchence mikrofalowej koniecznie wystąpi aktywny prąd indukowany w obwodzie sieci, którego powstanie zużywa energię źródła oscylacji. Ta energia jest ostatecznie tracona na dodatkowe ogrzewanie anody i katody przez prąd konwekcyjny. Rzeczywiście, dodatnia półfala napięcia siatki, przyspieszająca elektrony wylatujące z katody, daje im dodatkową energię, a podczas ujemnego półcyklu siatki odpycha elektrony w kierunku anody, a także otrzymują dodatkową energię. energia. W efekcie elektrony z większą siłą bombardują anodę, która jest dodatkowo nagrzewana. Ponadto elektrony, które nie przeleciały przez siatkę, ale zwróciły się z powrotem do katody, są również odpychane przez siatkę podczas ujemnego półcyklu i otrzymują więcej dodatkowej energii. Elektrony te bombardują dodatkową katodę i powodują jej dalsze nagrzewanie. W ten sposób przez cały okres źródło oscylacji oddaje energię elektronom i zużywają ją na bombardowanie anody i katody. Straty energii w lampach mikrofalowych powstają nie tylko z powodu bezwładności elektronów, ale także z wielu innych powodów. Ze względu na efekt powierzchniowy wzrasta rezystancja czynna elektrod i ich wyprowadzeń. Po powierzchni przewodników metalowych przepływają znaczne prądy, które powodują bezużyteczne nagrzewanie. W kuchence mikrofalowej straty wzrastają we wszystkich stałych dielektrykach znajdujących się pod wpływem zmiennego pola elektrycznego. 49. LOT KLYSTER Dla fal centymetrowych, z powodzeniem stosowany klistrony, których praca opiera się na zmianie prędkości przepływu elektronów. W tych urządzeniach znaczny czas lotu elektronów nie jest szkodliwy, ale niezbędny do normalnej pracy urządzenia. Klistrony są łączenie (dwurezonatorowy i wielorezonatorowy) odpowiedni do generowania i wzmacniania oscylacji oraz odblaskowy (pojedynczy rezonator), pracujące tylko jako generatory. Przepływ elektronów z katody do anody przechodzi przez dwie pary siatek, które są częścią ścianek dwóch rezonatorów wnękowych. Pierwszy rezonator służy jako obwód wejściowy. Wzmocnione oscylacje z częstotliwością są do niego dostarczane za pomocą linii koncentrycznej i cewki komunikacyjnej. Jego siatki tworzą modulator, w którym modulowana jest prędkość elektronu. Drugi rezonator służy jako obwód wyjściowy do wzmacniania oscylacji. Ich energia jest pobierana za pomocą cewki komunikacyjnej i linii koncentrycznej. Do obu rezonatorów i do anody przykładane jest napięcie dodatnie, które wytwarza pole przyspieszające między siatką a katodą, pod wpływem którego elektrony wlatują do modulatora ze znaczną prędkością początkową. Jeżeli do pierwszego rezonatora zostaną wprowadzone oscylacje, to pomiędzy siatkami istnieje zmienne pole elektryczne, które oddziałuje na przepływ elektronów i zmienia (moduluje) jego prędkość. W tym półcyklu, gdy na drugiej siatce będzie potencjał dodatni, a na pierwszej siatce potencjał ujemny, pole między siatkami będzie przyspieszać, a elektrony przechodzące przez modulator uzyskają dodatkową prędkość. Elektrony o dużych prędkościach doganiają elektrony poruszające się z mniejszymi prędkościami, w wyniku czego strumień elektronów rozdziela się na oddzielne, gęstsze grupy elektronów - pęczki elektronowe. Oznacza to, że dzięki modulacji przepływu elektronów pod względem prędkości w przestrzeni grupowania uzyskuje się modulację tego przepływu pod względem gęstości. Grupowane są tylko elektrony, które przelatują przez modulator w ciągu połowy okresu. Dobre grupowanie jest możliwe tylko wtedy, gdy zmiana prędkości elektronów pod wpływem modulującego pola przemiennego jest nieznaczna w porównaniu z prędkością, którą otrzymali ze stałego napięcia przyspieszającego. Dlatego napięcie AC pomiędzy siatkami rezonatorów musi być znacznie mniejsze niż napięcie DC. Grupowanie elektronów w paczkę powtarza się przez pół okresu. Po punkcie największej koncentracji przepływu elektronów elektrony ponownie się rozchodzą. Wiązki elektronów przelatują przez drugi rezonator, gdy znajdujące się w nim pole elektryczne opóźnia się. Elektrony, które przepłynęły przez drugi rezonator, uderzają w anodę i podgrzewają ją. Niektóre elektrony trafiają również w siatki rezonatorów. Gdyby przepływ elektronów nie był modulowany, to nie mógłby utrzymać oscylacji w drugim rezonatorze. Klystrony dwurezonatorowe są stosowane jako wzmacniacze w nadajnikach mikrofalowych, a ich użyteczna moc w trybie pracy ciągłej może dochodzić do kilkudziesięciu kilowatów, aw trybie pulsacyjnym do kilkudziesięciu megawatów. Gdy długość fali ulega skróceniu, moc nadajników maleje. Do wzmacniania słabych sygnałów w odbiornikach klistrony są mało przydatne, ponieważ wytwarzają duże szumy własne. 50. LAMPY PODRÓŻNE I ODWRÓCONE Wady tkwiące w klistronie, wyeliminowane w lampie fali podróżnej (TWT). Wzmocnienie i sprawność w TWT mogą być znacznie wyższe niż w klistronie. Wyjaśnia to fakt, że przepływ elektronów w TWT oddziałuje ze zmiennym polem elektrycznym na dużej części jego ścieżki i oddaje znaczną część swojej energii, aby wytworzyć wzmocnione oscylacje. Przepływ elektronów w TWT jest znacznie słabszy niż w klistronie, a zatem poziom szumu jest stosunkowo niski. Pasmo częstotliwości może być bardzo duże, ponieważ w TWT nie ma układów oscylacyjnych. Przepustowość nie jest ograniczona samą lampą, ale różnymi dodatkowymi urządzeniami, które służą do łączenia lampy z obwodami zewnętrznymi i skoordynowania ze sobą poszczególnych elementów tych dodatkowych urządzeń. Lampy o fali bieżącej dla częstotliwości rzędu tysięcy megaherców mają pasmo częstotliwości transmitowanych oscylacji rzędu setek megaherców, co jest wystarczające dla radaru i wszystkich rodzajów współczesnej komunikacji radiowej. LBV są ułożone w ten sposób. W lewej części wydłużonego cylindra umieszczony jest szperacz elektroniczny z żarzoną katodą, elektrodą skupiającą i anodą. Wiązka elektronów wytworzona przez projektor elektroniczny przechodzi dalej wewnątrz spirali drucianej, która pełni rolę wewnętrznego przewodu linii koncentrycznej. Zewnętrzny drut tej linii to metalowa rurka. Spirala jest mocowana na specjalnych izolatorach. Cewka skupiająca zasilana prądem stałym służy do ściskania wiązki elektronów na całej jej długości. Zamiast cewki ogniskującej można również zastosować magnesy trwałe. Ponieważ systemy ogniskowania magnetycznego są bardzo nieporęczne, opracowano metody elektrostatyczne do ogniskowania wiązki elektronów w TWT, tj. ogniskowania za pomocą pola elektrycznego. W TWT dla krótszych centymetrowych długości fali helisa jest zastępowana innymi rodzajami systemów moderujących, ponieważ trudno jest wyprodukować bardzo małą helisę. Te systemy opóźniające są falowodami o złożonej konstrukcji zygzakowatej lub o ściankach przypominających grzebienie. Wzdłuż takich falowodów wiązka elektronów przechodzi w linii prostej, a fala elektromagnetyczna rozchodzi się ze zmniejszoną prędkością. Podobne systemy wolnofalowe są również stosowane w TWT o dużej mocy, ponieważ spirala nie jest w stanie wytrzymać w niej rozpraszania dużej mocy. Zasady działania TWT posłużyły jako podstawa do stworzenia rury o fali wstecznej (BWO), która czasami jest również nazywana karcynotron. Ta lampa, w przeciwieństwie do TWT, jest przeznaczona tylko do generowania fal centymetrowych i krótszych. W BWO stosuje się również falowodowe systemy falowodowe, podobnie jak w TWT, ale fala i wiązka elektronów poruszają się do siebie. Początkowe słabe oscylacje w BWO są uzyskiwane z fluktuacji wiązki elektronów, następnie są wzmacniane i następuje generacja. Zmieniając stałe napięcie tworzące wiązkę elektronów, możliwe jest przeprowadzenie elektronicznego strojenia BWO w bardzo szerokim zakresie częstotliwości. BWT małej mocy zostały stworzone dla częstotliwości dziesiątek tysięcy megaherców, z użyteczną mocą generowanych oscylacji do kilkudziesięciu ułamków wata z wydajnością rzędu kilku procent. Dla częstotliwości do 10 000 MHz opracowano BWO o użytecznej mocy dziesiątek kilowatów przy pracy ciągłej i setkach kilowatów przy pracy impulsowej. Generatory BWO małej i średniej mocy z prostoliniową wiązką elektronów nazywane są karcynotronami typu 0. Dla dużych mocy stosuje się BWO, zwane karcynotronami typu M, w których wiązka elektronów porusza się po okręgu pod działaniem pola magnetycznego. Układ opóźniający w tych lampach jest umieszczony na obwodzie, a poprzeczne pole magnetyczne wytwarzane jest przez magnes trwały w taki sam sposób, jak w magnetronie. 51. OGÓLNE POJĘCIA DOTYCZĄCE ENERGII ELEKTRYCZNEJ I TEORII ELEKTRONICZNEJ Przez długi czas panował pogląd, że atomy są pierwotnymi, nierozkładalnymi i niezmiennymi częściami wszystkich ciał przyrody, stąd nazwa „atom”, co po grecku oznacza „niepodzielny”. Pod koniec IX wieku fizycy, przepuszczając prąd elektryczny o wysokim napięciu przez rurkę z silnie rozrzedzonym gazem, zauważyli zielonkawą poświatę w szkle rury, spowodowaną działaniem niewidzialnych promieni. Plama świetlna znajdowała się naprzeciwko elektrody podłączonej do ujemnego bieguna źródła prądu (katody). Dlatego promienie nazywają się katodowy. Pod działaniem pola magnetycznego świetlista plamka przesunęła się na bok. Promienie katodowe zachowywały się tak samo jak przewodnik z prądem w polu magnetycznym. Przesunięcie zielonkawej plamy następowało również pod wpływem pola elektrycznego, a ciało naładowane dodatnio przyciągało promienie, ciało naładowane ujemnie je odpychało. Sugerowało to, że same promienie katodowe są strumieniem cząstek ujemnych - elektronów. Fizyka klasyczna widzi różnicę między dielektrykami a przewodnikami w tym, że w dielektryku wszystkie elektrony są mocno trzymane w pobliżu jądra atomu. Natomiast w przewodnikach połączenie między elektronami a jądrem atomu jest silne i istnieje duża liczba wolnych elektronów, których uporządkowany ruch powoduje prąd elektryczny. Fizyka klasyczna dopuszcza dowolną wartość energii atomu i uważa, że zmiana energii atomu zachodzi w sposób ciągły w dowolnie małych porcjach. Jednak badanie widm optycznych pierwiastków i zjawisk związanych z oddziaływaniem atomów z elektronami wskazuje na ciągły charakter energii wewnętrznej atomów. Fizyka atomowa i molekularna udowadnia, że energia atomu nie może być dowolna i przyjmuje tylko dość pewne wartości, które są charakterystyczne dla każdego atomu. Możliwe wartości energii wewnętrznej atomu nazywane są poziomami energetycznymi lub kwantowymi. Poziomy energii, których atom nie może posiadać, nazywane są poziomami zabronionymi. Istnieje szereg cząstek elementarnych: protony i neutrony, mezony dodatnie i ujemne, elektrony, pozytony, neutrina i antyprotony. Zjawiska elektryczne znane są ludziom od bardzo dawna (pocieranie bursztynu tkaniną). Ciała zdolne do przewodzenia ładunków elektrycznych nazywane są przewodnikami elektrycznymi. Ciała, które bardzo słabo przewodzą prąd elektryczny, nazywane są nieprzewodzącymi, izolatorami lub dielektrykami. Zaobserwowano, że naelektryzowane ciała przyciągają się lub odpychają. W wyniku elektryfikacji różnych ciał uzyskuje się dwa rodzaje elektryczności. Konwencjonalnie jeden rodzaj elektryczności nazywano dodatnim, a drugi ujemnym. W konsekwencji ciała naładowane tą samą elektrycznością odpychają się, naładowane przeciwną elektrycznością – przyciągają. Elektryczność jest właściwością materii (szczególną formą ruchu materii), która ma dwoistą naturę i objawia się w elementarnych cząstkach materii (elektryczność dodatnia - w protonach, pozytonach i mezonach, ujemna - w elektronach, antyprotonach lub mezonach) . 52. PRAWO COULOMBA. POLE ELEKTRYCZNE Dwa naelektryzowane ciała działają na siebie z siłą proporcjonalną do ilości ładunku lub ilości energii elektrycznej na tych ciałach i odwrotnie proporcjonalną do kwadratu odległości między ciałami, jeśli właściwe wymiary tych ciał są małe w porównaniu z odległością między nimi. ich. Tę zależność siły oddziaływania od wielkości ładunków i odległości między nimi ustalił empirycznie fizyk wisiorek. Późniejsze badania wykazały, że siła oddziaływania między ładunkami zależy również od środowiska, w którym ładunki się znajdują. Eksperymenty doprowadziły Coulomba do ustalenia następującego prawa: dwa fizyczne ładunki punktowe q1 i q2, znajdujące się w jednorodnym ośrodku o względnej przepuszczalności elektrycznej e w odległości r, działają na siebie z siłą F proporcjonalną do iloczynu tych ładunków i odwrotnie proporcjonalna do kwadratu odległości między nimi. fizyczne opłaty punktowe są wywoływane, jeśli ich własne wymiary są małe w porównaniu z odległością między nimi. Wzór Coulomba ma postać: F =(q1q2)/(4?? A0r 2), gdzie A0=8,85 10-12F/m jest przepuszczalnością elektryczną pustej przestrzeni. ? - względna przepuszczalność elektryczna. Pokazuje, ile razy, przy niezmienionych innych parametrach, siła oddziaływania dwóch ładunków w dowolnym ośrodku jest mniejsza niż w próżni. Względna przepuszczalność elektryczna jest wielkością bezwymiarową. Natężenie pola elektrycznego szacuje się na podstawie sił mechanicznych, z jakimi pole działa na naładowane ciała. Ponieważ zgodnie z prawem Coulomba siła oddziaływania między ładunkami w danym ośrodku zależy od wielkości ładunków i odległości między nimi, to siła mechaniczna, z jaką pole w danym momencie przestrzeni działa na jednostkę dodatnią ładunek umieszczony w tym miejscu jest traktowany jako miara ilościowa pola. Wartość ta nazywana jest natężeniem pola elektrycznego i oznaczana jest przez E. Zgodnie z definicją E=F/q. Przyrównując jeden z ładunków we wzorze kulombowskim do jedności, otrzymujemy wyrażenie na natężenie pola E w punkcie oddalonym w odległości r od fizycznego ładunku punktu: E = q/(4???0r2), a dla pustki, w której względna przepuszczalność elektryczna jest równa jeden: E = q/(4??0r 2). Jednostką pomiaru napięcia jest V/m. Nazywa się pole elektryczne, którego intensywność w różnych punktach przestrzeni jest taka sama pod względem wielkości i kierunku jednolite pole. Badając różne zjawiska fizyczne, mamy do czynienia z wielkościami skalarnymi i wektorowymi. Dodatni ładunek elektryczny wprowadzony w pole dodatnio naładowanego ciała kulistego, oddalony od innych ładunków, będzie odpychany w linii prostej, która jest kontynuacją promienia naładowanego ciała. Umieszczając ładunek elektryczny w różnych punktach pola naładowanej kuli i zaznaczając trajektorie ładunku pod działaniem jego sił elektrycznych, otrzymujemy szereg radykalnych linii prostych rozchodzących się we wszystkich kierunkach. Te wyimaginowane linie, wzdłuż których porusza się dodatni, bezwładny ładunek wprowadzony do pola elektrycznego, nazywane są elektrycznymi liniami siły. W polu elektrycznym można narysować dowolną liczbę linii siły. Za pomocą linii graficznych można graficznie przedstawić nie tylko kierunek, ale także natężenie pola elektrycznego w danym punkcie. Ilość energii elektrycznej na jednostkę powierzchni naładowanego ciała nazywana jest gęstością powierzchniową ładunku elektrycznego. Zależy to od ilości energii elektrycznej na ciele, a także od kształtu powierzchni przewodnika. 53. PRZEWODNIK I DIELEKTRYKA W POLU ELEKTRYCZNYM Jeżeli nienaładowany izolowany przewodnik zostanie wprowadzony w pole elektryczne, to w wyniku działania sił pola elektrycznego w przewodzie następuje oddzielenie ładunków elektrycznych. Swobodne elektrony przewodnika będą poruszać się w kierunku przeciwnym do kierunku pola elektrycznego. W efekcie na końcu przewodnika zwróconym w stronę naładowanej kulki będzie nadmiar elektronów, powodując ujemny ładunek tego końca, a na drugim końcu przewodnika będzie brak elektronów, powodując dodatni ładunek tej części dyrygenta. Rozdzielenie ładunków na przewodniku pod wpływem naładowanego ciała nazywa się elektryzacją przez wpływ lub indukcją elektrostatyczną, a ładunki na przewodniku nazywane są ładunkami indukowanymi. Gdy przewodnik zbliża się do naładowanej kuli, liczba ładunków indukowanych na przewodniku wzrasta. Pole elektryczne naładowanej kuli zmienia się, gdy tylko znajdzie się w niej przewodnik. Linie elektryczne siły kuli, które wcześniej rozchodziły się równomiernie i radykalnie, teraz wyginają się w kierunku przewodnika. Ponieważ początkiem i końcem linii sił elektrycznych są ładunki elektryczne leżące na powierzchni przewodników, to zaczynając od powierzchni z ładunkami dodatnimi, linia sił kończy się na powierzchni z ładunkami ujemnymi. Pole elektryczne nie może istnieć wewnątrz przewodnika. W przeciwnym razie istniałaby różnica potencjałów między poszczególnymi punktami przewodnika, ruch ładunków (prąd przewodzenia) następowałby w przewodniku, aż w wyniku redystrybucji ładunków potencjały wszystkich punktów przewodnika nie wyrównałyby się . Stosuje się to, gdy chcą chronić przewodnik przed wpływem zewnętrznych pól elektrycznych. Aby to zrobić, przewodnik jest otoczony innym przewodnikiem, wykonanym w postaci litej metalowej powierzchni lub siatki drucianej z małymi otworami. Ładunki indukowane powstałe na przewodniku w wyniku oddziaływania na niego naładowanego pola można oddzielić od siebie poprzez przełamanie przewodnika na pół. Dielektryk różni się od przewodnika brakiem wolnych elektronów. Elektrony atomów dielektrycznych są mocno związane z jądrem atomowym. Dielektryk wprowadzony do pola elektrycznego, podobnie jak przewodnik, jest naelektryzowany pod wpływem oddziaływania. Istnieje jednak znacząca różnica między elektryzowaniem przewodnika a dielektrykiem. Jeżeli w przewodniku pod wpływem sił pola elektrycznego swobodne elektrony poruszają się po całej objętości przewodnika, to w dielektryku swobodny ruch ładunków elektrycznych nie może wystąpić. Ale w obrębie jednej cząsteczki dielektrycznej ładunek dodatni przesuwa się wzdłuż kierunku pola elektrycznego, a ładunek ujemny w kierunku przeciwnym. W wyniku oddziaływania naładowanego ciała na powierzchni dielektryka powstaną ładunki elektryczne. Zjawisko to nazywamy polaryzacją dielektryczną. Istnieją dwie klasy dielektryków. 1. Cząsteczka w stanie neutralnym ma ładunki dodatnie i ujemne tak blisko siebie, że ich działanie jest wzajemnie kompensowane. Pod wpływem pola elektrycznego ładunki dodatnie i ujemne w cząsteczce są nieznacznie przesunięte względem siebie, tworząc dipol. 2. Cząsteczki i przy braku pola elektrycznego tworzą dipole. Takie dielektryki nazywane są polarnymi. Konieczność prawidłowego doboru wielkości natężenia pola elektrycznego w dielektryku doprowadziła do powstania teorii wytrzymałości elektrycznej, która jest ważna dla współczesnej technologii wysokich napięć. 54. GŁÓWNE ELEKTRYCZNE MATERIAŁY IZOLACYJNE Azbest - minerał o strukturze włóknistej. Długość włókna wynosi od dziesięciu ułamków milimetra do kilku centymetrów. Z azbestu wytwarza się przędzę, taśmę, tkaniny, papier, tekturę itp. Cenną cechą jest wysoka odporność termiczna. Ogrzewanie do 300-400° nie zmienia właściwości azbestu. Ze względu na niską przewodność cieplną azbest stosowany jest jako izolacja termiczna w wysokich temperaturach. Azbest ma higroskopijność, która zmniejsza się, gdy jest impregnowany żywicami, bitumem itp. Właściwości elektroizolacyjne azbestu są niskie. Dlatego nie ma zastosowania przy wysokich napięciach. Kalafonia - krucha żywica o jasnożółtej lub brązowej barwie, uzyskana przez przetworzenie żywicy drzew iglastych. Kalafonia rozpuszcza się w olejach naftowych, ciekłych węglowodorach, olejach roślinnych, alkoholu, terpentynie. Temperatura mięknienia kalafonii wynosi 50-70 °C. Stosowany do przygotowania mas impregnacyjnych i wypełniających. Wosk parafinowy - woskowata substancja pochodząca z ropy naftowej. Dobrze oczyszczona parafina jest białą krystaliczną substancją. Służy do impregnacji drewna, papieru, substancji włóknistych, do napełniania cewek i transformatorów wysokiej częstotliwości, do przygotowania kompozycji izolacyjnych. Mika - minerał o strukturze krystalicznej. Ze względu na swoją strukturę łatwo dzieli się na pojedyncze liście. Ma wysoką wytrzymałość elektryczną, wysoką odporność na ciepło, odporność na wilgoć, wytrzymałość mechaniczną i elastyczność. Stosowane są dwa rodzaje miki: muskowit i flogopit, które różnią się składem, kolorem i właściwościami. Moskal to najlepsza mika. Z liści miki wytłoczone są prostokątne płytki na kondensatory, podkładki do urządzeń elektrycznych itp. Tekstolit - tworzywo sztuczne, które jest wielowarstwową tkaniną impregnowaną żywicą rezolową i prasowaną pod wysokim ciśnieniem do 150". Właściwości pozytywne: niska kruchość, wysokie właściwości mechaniczne, odporność na ścieranie. Właściwości negatywne: słabe właściwości elektryczne, niska odporność na wilgoć, droższe. Błonnik wykonany z porowatego papieru potraktowanego roztworem chlorku cynku. Dobry do obróbki mechanicznej. Dużą wadą jest jego higroskopijność. włókno jest skorodowane przez kwasy i zasady. Wykonane są z niego drobne części, uszczelki, ramki cewek. Cienkie włókno nazywa się leteroidem. Ceresin otrzymywany przez rafinację woskowego minerału - ozocerytu lub wazeliny. Posiada podwyższoną temperaturę topnienia (65-80°) oraz zwiększoną odporność na utlenianie. Stosowany do impregnacji kondensatorów papierowych, przygotowania mas izolacyjnych itp. szelak - naturalna żywica roślin tropikalnych, jej temperatura topnienia wynosi 100-200 °. Ma wygląd żółtawych lub brązowych łusek, łatwo rozpuszczalnych w alkoholu. Służy do przygotowania mas szpachlowych, lakierów izolacyjnych i klejących, impregnacji taśm izolacyjnych. Łupek - łupek, ma strukturę warstwową. Niehigroskopijny, łatwo obrabialny. Służy do produkcji paneli, osłon na przełączniki nożowe itp. Ebonit (twarda guma) otrzymuje się z gumy przez dodanie do niej 20-50% siarki. Produkowany w postaci arkuszy (płyt), patyków i rur, dobrze nadaje się do obróbki skrawaniem. Wykorzystywany jest w technice słabych prądów, druty są wciągane do rurek ebonitowych podczas przechodzenia przez ściany i ukryte okablowanie. 55. KONCEPCJA PRĄDU ELEKTRYCZNEGO. PRAWO OHMA Nazywa się ruch elektronów przez przewodnik prąd elektryczny. W elektrotechnice konwencjonalnie przyjmuje się, że kierunek prądu jest przeciwny do kierunku ruchu elektronów w przewodniku. Innymi słowy, uważa się, że kierunek prądu pokrywa się z kierunkiem ruchu ładunków dodatnich. W swoim ruchu elektrony nie przechodzą przez całą długość przewodnika. Wręcz przeciwnie, pokonują bardzo krótkie odległości, zanim zderzą się z innymi elektronami, atomami lub cząsteczkami. Ta odległość nazywa się średnia droga wolna elektronów. Elektryczności nie można bezpośrednio obserwować. Przepływ prądu można ocenić tylko na podstawie działań, które on wytwarza. Znaki, dzięki którym łatwo ocenić obecność prądu: 1) prąd, przechodzący przez roztwory soli, zasad, kwasów, a także przez stopione sole, rozkłada je na ich części składowe; 2) przewodnik, przez który przepływa prąd elektryczny, jest podgrzewany; 3) prąd elektryczny przechodzący przez przewodnik wytwarza wokół niego pole magnetyczne. Najprostsza instalacja elektryczna składa się ze źródła (ogniwo galwaniczne, akumulator, generator itp.), odbiorników lub odbiorników energii elektrycznej (żarówek, grzejników elektrycznych, silników elektrycznych itp.) oraz przewodów łączących zaciski źródła napięcia z zaciski konsumenta . Prąd, który nie zmienia się pod względem wielkości ani kierunku, nazywany jest prądem stałym. Stały prąd elektryczny może płynąć tylko przez zamknięty obwód elektryczny. Otwarty obwód w dowolnym miejscu powoduje zatrzymanie prądu elektrycznego. Prąd stały jest dostarczany przez ogniwa galwaniczne, akumulatory, generatory prądu stałego, jeśli warunki pracy obwodu elektrycznego nie zmieniają się. Ładunek przechodzi przez przekrój przewodnika w określonym czasie. Siła prądu przepływającego przez przekrój przewodnika w czasie wynosi: I = q / t. Stosunek prądu I do pola przekroju przewodnika Z nazywa się gęstością prądu i jest oznaczony?. ?=I/S; gęstość prądu jest mierzona w A/m2. Gdy obwód elektryczny jest zamknięty, na zaciskach, na których występuje różnica potencjałów, powstaje prąd elektryczny. Swobodne elektrony pod wpływem sił pola elektrycznego poruszają się wzdłuż przewodnika. W swoim ruchu elektrony zderzają się z atomami przewodnika i dają im zapas energii kinetycznej. Prędkość elektronów stale się zmienia: kiedy elektrony zderzają się z atomami, cząsteczkami i innymi elektronami, zmniejsza się, a następnie wzrasta pod wpływem pola elektrycznego i ponownie maleje przy nowym zderzeniu. W rezultacie w przewodniku ustala się równomierny przepływ elektronów z prędkością kilku ułamków centymetra na sekundę. W konsekwencji elektrony przechodzące przez przewodnik zawsze napotykają opór z jego strony na swój ruch. Kiedy prąd elektryczny przepływa przez przewodnik, ten nagrzewa się. Opór elektryczny R przewodnika jest właściwością ciała lub medium do przekształcania energii elektrycznej w energię cieplną, gdy przepływa przez niego prąd elektryczny. R = ? l / S, gdzie ? jest oporem właściwym przewodnika, l jest długością przewodnika. Prąd w sekcji obwodu jest wprost proporcjonalny do napięcia w tej sekcji i odwrotnie proporcjonalny do rezystancji tej samej sekcji. Zależność ta znana jest jako prawo Ohma i wyrażana jest wzorem: I = U/R. Prąd płynie nie tylko przez zewnętrzną część obwodu, ale także przez wewnętrzną. EMF (E) źródła pokrywa wewnętrzne i zewnętrzne straty napięcia w obwodzie. Prawo Ohma dla całego obwodu: I = E / (R + r), gdzie R jest rezystancją zewnętrznej części obwodu, r jest rezystancją wewnętrznej części obwodu. 56. POŁĄCZENIE PRZEWODÓW MIĘDZY NIMI. PIERWSZE PRAWO KIRCHHOFFA Poszczególne przewody obwodu elektrycznego można łączyć ze sobą szeregowo, równolegle i mieszać. połączenie szeregowe przewody to takie połączenie, gdy koniec pierwszego przewodu jest połączony z początkiem drugiego, koniec drugiego przewodu jest połączony z początkiem trzeciego itd. Całkowita rezystancja obwodu, składająca się z kilku szeregowo- podłączonych przewodów jest równy sumie rezystancji poszczególnych przewodów: R \u1d R2 + R3 + R1 +. +R||. Prąd w poszczególnych odcinkach obwodu szeregowego jest taki sam: I2 = I3= I1=I. Spadek napięcia jest proporcjonalny do rezystancji danej sekcji. Całkowite napięcie obwodu jest równe sumie spadków napięcia w poszczególnych odcinkach obwodu: u \u2d u3 + UXNUMX + UXNUMX. Połączenie równoległe przewodniki taki opór nazywa się, gdy początki wszystkich przewodów są połączone w jednym punkcie, a końce przewodów w innym punkcie. Początek obwodu jest podłączony do jednego bieguna źródła napięcia, a koniec obwodu jest podłączony do drugiego bieguna. Przy równoległym połączeniu przewodów do przepływu prądu istnieje kilka sposobów. Prąd płynący do punktu rozgałęzienia rozprzestrzenia się dalej wzdłuż trzech rezystancji i jest równy sumie prądów opuszczających ten punkt: I= I1+ I2+ I3. Jeżeli prądy dochodzące do punktu rozgałęzienia są uważane za dodatnie, a wychodzące za ujemne, to dla punktu rozgałęzienia można napisać: równa się zeru. Zależność ta, która dotyczy prądów w dowolnym punkcie rozgałęzienia obwodu, nazywana jest pierwszym prawem Kirchhoffa. Zwykle przy obliczaniu obwodów elektrycznych kierunki prądów w gałęziach podłączonych do dowolnego punktu rozgałęzienia są nieznane. Dlatego, aby móc zapisać równanie pierwszego prawa Kirchhoffa, konieczne jest arbitralne wybranie tak zwanych dodatnich kierunków prądów we wszystkich jego gałęziach przed rozpoczęciem obliczania obwodu i oznaczenie ich strzałkami na schemacie . Korzystając z prawa Ohma, możesz wyprowadzić wzór do obliczenia całkowitego oporu, gdy konsumenci są połączeni równolegle. Całkowity prąd dochodzący do punktu to: I = U/R. Prądy w każdej z gałęzi to: I1 = U1 /R1; I2= U2 /R2; I3= U3 /R3. Zgodnie z pierwszym prawem Kirchhoffa I = I1+I2+I3 lub U/R= U/R1+U/R2+U/R3. Biorąc U po prawej stronie równości z nawiasów, otrzymujemy: U/R = U(1/R1 + 1 /R2+ 1/R3). Zmniejszając obie strony równania przez U, otrzymujemy wzór na obliczenie przewodności całkowitej: 1 /R=1/R1+1/r2+ 1/R3. Tak więc przy połączeniu równoległym nie wzrasta opór, ale przewodność. Przy obliczaniu całkowitego oporu rozgałęzienia zawsze okazuje się, że jest on mniejszy niż najmniejszy opór zawarty w rozgałęzieniu. Jeżeli rezystancje połączone równolegle są sobie równe, całkowity opór R jest równy rezystancji jednej gałęzi R1 podzielonej przez liczbę gałęzi n: R \u1d RXNUMX / n. Mieszane połączenie przewodów to połączenie, w którym występują zarówno szeregowe, jak i równoległe połączenia poszczególnych przewodów. 57. DRUGI PRAWO KIRCHHOFFA. METODA NAKŁADANIA Podczas obliczania obwodów elektrycznych często spotyka się obwody, które tworzą zamknięte pętle. W skład takich obwodów, oprócz rezystancji, mogą również wchodzić siły elektromotoryczne. Rozważ fragment złożonego obwodu elektrycznego. Podana jest polaryzacja wszystkich pól elektromagnetycznych. 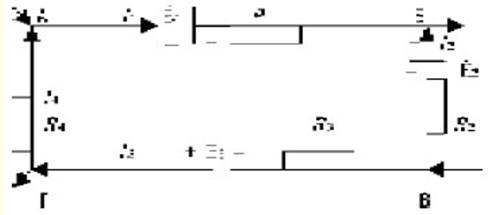 Dowolnie wybieramy pozytywne kierunki prądów. Obchodzimy kontur od punktu A w dowolnym kierunku, na przykład zgodnie z ruchem wskazówek zegara. Rozważ sekcję AB. W tym obszarze następuje spadek potencjału (prąd płynie z punktu o wyższym potencjale do punktu o niższym potencjale). W sekcji AB: ?A + E1 - I1R1=?B. Na stronie BV: ?B - E2 - I2R2 = ?C. W sekcji VG: ?B = I3R3 + E3 = ?G. Na stronie HA: ?G - I4R4 = ?ALE. Dodając wyraz po wyrazie cztery powyższe równania, otrzymujemy: ?A + E1- I1R1 + ?B - E2 - I2R2 + ?C - I3R3 + E3 + ?G- I4R4 - ?B + ?C + ?G + ?A lub E1 - I1R1 - E2 - I2R2 - I3R3 + E3 - I4R4 = 0. Przenosząc iloczyn IR na prawą stronę otrzymujemy: Ё1 - Ё2 + Ё3 = I1R1 + I2R2 + I3R3 + I4R4. To wyrażenie jest drugim Prawo Kirchhoffa. Wzór pokazuje, że w każdym obwodzie zamkniętym suma algebraiczna sił elektromotorycznych jest równa sumie algebraicznej spadków napięcia. Metoda nakładania służy do obliczania obwodów elektrycznych z kilkoma polami elektromagnetycznymi. Istotą metody superpozycji jest to, że prąd w dowolnej części obwodu można uznać za składający się z serii prądów częściowych spowodowanych przez każdy pojedynczy pole elektromagnetyczne, przy czym reszta pola elektromagnetycznego jest równa zeru. W problemach są łańcuchy, które mają tylko dwa punkty węzłowe. Pomiędzy punktami węzłowymi można umieścić dowolną liczbę rozgałęzień. Obliczanie takich obwodów jest znacznie uproszczone dzięki zastosowaniu metody napięcia węzłowego. i \u1d (E1d2 + E2d3 + E3d1) / (d2 + d3 + d4 + dXNUMX). Licznik wzoru na napięcie węzłowe reprezentuje sumę algebraiczną iloczynów pola elektromagnetycznego gałęzi. W mianowniku wzoru podana jest suma przewodności wszystkich gałęzi. Jeśli pole elektromagnetyczne dowolnej gałęzi ma kierunek przeciwny do wskazanego na schemacie, jest ono zawarte we wzorze na napięcie węzłowe ze znakiem minus. Metoda prądu pętli służy do obliczania złożonych obwodów elektrycznych z więcej niż dwoma prądami węzłowymi. Istota metody polega na założeniu, że każdy obwód ma swój własny prąd. Wtedy we wspólnych obszarach położonych na granicy dwóch sąsiednich obwodów popłynie prąd równy sumie algebraicznej prądów tych obwodów. 58. ELEKTROLIZA. PIERWSZE I DRUGIE PRAWO FARADAYA Prąd przepływający przez przewodniki płynne rozkłada je na części składowe. Dlatego nazywane są przewodniki płynne elektrolity. Nazywa się rozkład elektrolitów pod wpływem prądu elektrycznego elektroliza. Elektrolizę przeprowadza się w kąpielach galwanicznych. kąpiel galwaniczna to naczynie, do którego wlewa się ciecz - elektrolit, który ulega rozkładowi pod wpływem prądu. Dwie płytki (na przykład węgiel) są opuszczane do naczynia z elektrolitem, którym będą elektrody. Biegun ujemny źródła prądu stałego podłączamy do jednej elektrody (katody), a biegun dodatni do drugiej elektrody (anody) i zamykamy obwód. Zjawisku elektrolizy towarzyszyć będzie wydzielanie się substancji na elektrodach. Podczas elektrolizy wodór i metale są zawsze uwalniane na katodzie. Wynika z tego, że pochodzenie prądu przez przewodniki cieczy jest związane z ruchem atomów substancji. Obojętna cząsteczka substancji, wpadając do rozpuszczalnika, rozpada się (dysocjuje) na części - jony, które przenoszą równe i przeciwne ładunki elektryczne. Wyjaśnia to fakt, że siła oddziaływania między ładunkami umieszczonymi w ośrodku o przepuszczalności elektrycznej e zmniejsza się o współczynnik e. Dlatego siły, które wiążą cząsteczkę substancji znajdującej się w rozpuszczalniku o dużej przepuszczalności elektrycznej słabną, a zderzenia termiczne cząsteczek są wystarczające, aby zaczęły się one dzielić na jony, tj. e. oddzielić się. Wraz z dysocjacją cząsteczek w roztworze zachodzi proces odwrotny - ponowne zjednoczenie jonów w cząsteczki obojętne (molizacja). Kwasy dysocjują na dodatnio naładowane jony wodorowe i ujemnie naładowane jony pozostałości kwasowej. Zasady dysocjują na jony metali i jony pozostałości wody. Sole dysocjują na jony metali i jony reszt kwasowych. Jeśli do elektrod zostanie przyłożone stałe napięcie, między elektrodami powstanie pole elektryczne. Jony naładowane dodatnio będą przemieszczać się w kierunku katody, jony naładowane ujemnie w kierunku anody. Docierając do elektrod, jony są neutralizowane. Zjawisko elektrolizy badał Faradaya od strony ilościowej i jakościowej. Stwierdził on, że ilość substancji uwalnianej podczas elektrolizy na elektrodach jest proporcjonalna do natężenia prądu i czasu jego przepływu, czyli innymi słowy do ilości substancji, która przepłynęła przez elektrolit. To jest pierwsze prawo Faradaya. Ten sam prąd, przechodzący w tym samym czasie przez różne elektrolity, uwalnia różne ilości substancji na elektrodach. Ilość substancji w miligramach uwalniana na elektrodzie przy prądzie 1A przez 1s nazywana jest równoważnikiem elektrochemicznym i jest oznaczona jako b. Pierwsze prawo Faradaya wyraża wzór: m=a/t. Równoważnik chemiczny (m) substancji to stosunek masy atomowej (A) do wartościowości (n): m = A / n. Drugie prawo Faradaya pokazuje, od jakich właściwości substancji zależy wartość jej elektrochemicznego odpowiednika. Elektroliza znalazła szerokie zastosowanie w inżynierii. 1. Powlekanie metali warstwą innego metalu metodą elektrolizy (galwanizacja). 2. Pozyskiwanie kopii z obiektów za pomocą elektrolizy (galwanizacji). 3. Rafinacja (oczyszczanie) metali. 59. BATERIE Do zasilania obwodów sterowania, urządzeń zabezpieczających, sygnalizacji, automatyki, oświetlenia awaryjnego, napędów i cewek trzymających wyłączników szybkoobrotowych, mechanizmów pomocniczych w elektrowniach i podstacjach musi istnieć takie źródło energii elektrycznej, którego działanie nie byłoby uzależnione o stanie głównych jednostek elektrowni lub podstacji. To źródło energii musi zapewniać nieprzerwaną i dokładną pracę tych obwodów zarówno podczas normalnej pracy instalacji, jak iw razie wypadku. Takim źródłem energii w elektrowniach i podstacjach jest bateria akumulatorowa. Terminowo naładowany akumulator o dużej pojemności może zasilać pantografy przez cały czas wypadku. Baterie są również wykorzystywane do oświetlania samochodów, wagonów kolejowych, ruchu samochodów elektrycznych i łodzi podwodnych, do zasilania instalacji radiowych i różnych urządzeń, w laboratoriach i do innych celów. Akumulator jest wtórnym źródłem napięcia elektrycznego, ponieważ w przeciwieństwie do ogniw galwanicznych może dawać energię dopiero po wstępnym naładowaniu. Akumulator jest ładowany poprzez podłączenie do stałego źródła napięcia. W wyniku procesu elektrolizy zmienia się stan chemiczny płytek akumulatora i ustala się między nimi pewna różnica potencjałów. Akumulator składa się z kilku akumulatorów kwasowo-ołowiowych lub alkalicznych. Akumulator kwasowo-ołowiowy składa się z kilku dodatnich i ujemnych płyt zanurzonych w pojemniku z elektrolitem. Elektrolit jest roztworem kwasu siarkowego w wodzie destylowanej. Płyty baterii są powierzchowne i masywne. Płyty powierzchniowe wykonane są z czystego ołowiu. Aby zwiększyć powierzchnię płytek, są one żebrowane. Płytki masowe są ołowianą kratą, w której komórki są rozmazane tlenki ołowiu. Aby masa nie wypadła z ogniw, płyta jest pokryta z obu stron ołowianymi blachami z otworami. Zazwyczaj dodatnia płyta akumulatora jest wykonana z powierzchni, a ujemna to masa. Oddzielne płyty dodatnie, jak również płyty ujemne, są lutowane w dwa izolowane od siebie bloki. Aby płyty dodatnie działały po obu stronach, są pobierane o jeden więcej niż ujemne. Istnieją dwa rodzaje baterii alkalicznych: kadmowo-niklowe i żelazowo-niklowe. Płyty baterii alkalicznych to niklowane stalowe ramy z ogniwami, w których umieszczone są worki z cienkiej niklowanej perforowanej stali. Aktywna masa jest wciskana do worków. Naczynie na baterie alkaliczne to stalowa spawana skrzynka, w wieczku której znajdują się trzy otwory: dwa do wyjmowania zacisków i jeden do napełniania elektrolitu i odprowadzania gazów. Zalety: brak zużycia ołowiu; mają dużą wytrzymałość i wytrzymałość mechaniczną; przy dłuższej ekspozycji ponoszą niewielkie straty przy samorozładowaniu i nie ulegają pogorszeniu; emitują mniej szkodliwych gazów i oparów; mają mniejszą wagę. Wady: niższy EMF; niższa wydajność; wyższy koszt. 60. ŻARÓWKI ELEKTRYCZNE Żarówka została wynaleziona przez rosyjskiego naukowca JAKIŚ. Lodygin i po raz pierwszy pokazano im w 1873 roku. Zasada działania lampy żarowej opiera się na silnym nagrzewaniu przewodnika (żarnika), gdy przepływa przez niego prąd elektryczny. W tym przypadku przewodnik zaczyna emitować, oprócz energii cieplnej, również energię świetlną. Aby zapobiec wypaleniu filamentu, należy go przenieść do szklanej kolby, z której wypompowywane jest powietrze. W ten sposób układają się tak zwane puste lampy. Początkowo jako filament stosowano włókno węglowe, otrzymywane przez kalcynację włókien roślinnych. Lampy z takim żarnikiem emitowały słabe, żółtawe światło, zużywając energię. Włókno węglowe rozgrzane do temperatury 1700° stopniowo wypalało się, co doprowadziło do stosunkowo szybkiej śmierci lampy. Żarówki z żarnikiem węglowym nie są już używane. Teraz w lampach żarowych zamiast żarnika węglowego stosuje się żarnik wykonany z metali ogniotrwałych osmu lub wolframu. Żarnik wolframowy, rozgrzany do 2200 ° w pustych lampach, emitujący jaśniejsze światło, zużywa mniej energii niż żarnik węglowy. Wypalanie żarnika zmniejsza się, jeśli szklana bańka (cylinder) lampy jest wypełniona gazem, który nie sprzyja spalaniu, takim jak azot lub argon. Takie lampy nazywane są wypełnionymi gazem. Temperatura żarnika podczas pracy takiej lampy sięga 2800 °. Nasza branża produkuje żarowe lampy oświetleniowe na napięcia 36, 110, 127 i 220 V. Do celów specjalnych wykonuje się również lampy na inne napięcia. Żarówki mają bardzo niską sprawność. W nich tylko około 4-5% całkowitej energii elektrycznej zużywanej przez lampę jest przekształcane w energię świetlną; reszta energii jest zamieniana na ciepło. Obecnie szeroko stosowane są lampy gazowe. Wykorzystują właściwość rozrzedzonych gazów do świecenia, gdy przepływa przez nie prąd elektryczny. Światło emitowane przez lampę gazową zależy od rodzaju gazu. Neon daje światło czerwono-pomarańczowe, argon - niebiesko-fioletowe, hel - żółto-różowe. Lampy gazowe zasilane są prądem przemiennym o wysokim napięciu uzyskiwanym za pomocą transformatorów. Lampy te znalazły zastosowanie na szyldy, reklamy i iluminacje. Nasza branża produkuje również lampy zawierające rozrzedzone pary rtęci w szklanych rurkach. Przepuszczając przez nie prąd, opary mogą słabo świecić. Wewnętrzna powierzchnia tubusu pokryta jest specjalną masą - luminoforem, który świeci pod wpływem żaru pary rtęci. Te lampy nazywają się świetlówki. Obecnie produkowane są trzy rodzaje świetlówek: świetlówki stosowane do oświetlania miejsc, w których konieczne jest zróżnicowanie barw - poligrafia, przemysł bawełniany itp.; lampy z białym światłem do oświetlania pomieszczeń przemysłowych, biurowych i mieszkalnych; ciepłe białe lampy do oświetlania muzeów, teatrów i galerii sztuki. Lampy fluorescencyjne są czterokrotnie wydajniejsze niż tradycyjne żarówki. 61. SPAWANIE ELEKTRYCZNE Istnieją dwa rodzaje spawania elektrycznego: 1) łuk; 2) zgrzewanie elektryczne oporowe. Spawanie łukiem elektrycznym zostało wynalezione przez rosyjskiego inżyniera N.N. Benardos w 1882 roku Spawanie łukowe wykorzystuje ciepło wytwarzane przez łuk elektryczny. Podczas spawania metodą Benardosa jeden biegun źródła napięcia jest podłączony do pręta węglowego, a drugi biegun do spawanych części. Cienki metalowy pręt jest wprowadzany do płomienia łuku elektrycznego, który topi się, a krople stopionego metalu, spływając na części i krzepnąc, tworzą szew spawalniczy. W 1891 r. rosyjski inżynier N.G. Slavyanov zaproponował inną metodę spawania łukiem elektrycznym, która była najczęściej stosowana. Spawanie elektryczne metodą Slavyanov jest następujące. Pręt węglowy został zastąpiony metalową elektrodą. Sama elektroda topi się, a stopiony metal, krzepnący, łączy spawane części. Po użyciu elektroda jest wymieniana na nową. Przed spawaniem części należy ją dokładnie oczyścić z rdzy, zgorzeliny, oleju, brudu dłutem, pilnikiem, papierem ściernym. Aby stworzyć stabilny łuk i uzyskać mocny szew, elektrody metalowe są powlekane specjalnymi związkami. Taka powłoka topi się również podczas topienia elektrody i zalewanie silnie nagrzanych powierzchni spawanych części nie pozwala na ich utlenianie. Zgrzewanie elektryczne oporowe. Jeśli umieścisz dwa kawałki metalu blisko siebie i przepłyniesz przez nie silny prąd elektryczny, to z powodu uwolnienia ciepła w miejscu styku kawałków (ze względu na wysoką rezystancję przejściową), te ostatnie są podgrzewane do wysokiej temperatury i spawane. Obecnie spawanie elektryczne, zarówno łukowe, jak i oporowe, mocno wkroczyło do branży i stało się bardzo rozpowszechnione. Spawają blachy i kątowniki, belki i szyny, maszty i rury, kratownice i kotły, statki itp. Spawanie służy do wykonywania nowych i napraw starych części ze stali, żeliwa i metali kolorowych. Opracowano nowe metody wykorzystania spawania elektrycznego: podwodne spawanie elektryczne; automatyczne spawanie; spawanie prądem przemiennym (urządzenie posiada specjalną część - oscylator, którego zadaniem jest generowanie prądu przemiennego o wysokim napięciu i bardzo wysokiej częstotliwości, co zapewnia stabilne spalanie łuku podczas spawania cienkich i grubych elementów metalowych). Podczas zamykania i otwierania wyłącznika lub wyłącznika, a także zamykania i otwierania styków urządzeń i aparatury, iskra elektryczna występująca między stykami, a często również łuk elektryczny, który po niej następuje, topi metal, a styki ulegają spaleniu lub spawać, zakłócając pracę instalacji. Zjawisko to nazywa się erozją elektryczną. Iskra na jej wygląd niejako „gryzie” metal. Aby zwalczyć iskrę, czasami kondensator o określonej pojemności jest umieszczony między stykami równolegle do iskiernika. Inżynierowie B.R. Łazarenko i I.N. Łazarenko wykorzystał właściwość iskry elektrycznej do „obgryzania metalu” w zaprojektowanej przez siebie instalacji elektroerozyjnej. Działanie instalacji wygląda w zasadzie następująco. Jeden przewód ze źródła napięcia jest podłączony do metalowego pręta. Drugi przewód jest podłączony do przedmiotu obrabianego znajdującego się w oleju. Metalowy pręt jest wprawiany w drgania. Iskra elektryczna, która pojawia się między prętem a częścią, „gryzie” część, tworząc w niej otwór, który ma taki sam kształt jak przekrój pręta (sześciokątny, kwadratowy, trójkątny itp.). 62. ELEKTROMAGNETYZM Pole magnetyczne jest jedną z dwóch stron pola elektromagnetycznego, wzbudzaną ładunkami elektrycznymi poruszających się cząstek oraz zmianą pola elektrycznego i charakteryzuje się oddziaływaniem siły na poruszające się naładowane cząstki, a tym samym na prądy elektryczne. Kierunek linii indukcji magnetycznej zmienia się wraz ze zmianą kierunku prądu w przewodniku. Linie indukcji magnetycznej wokół przewodnika mają następujące właściwości: 1) linie indukcji magnetycznej przewodu prostego mają kształt koncentrycznych okręgów; 2) im bliżej przewodnika, tym gęstsze są linie indukcji magnetycznej; 3) indukcja magnetyczna (natężenie pola) zależy od wielkości prądu w przewodzie; 4) kierunek linii indukcji magnetycznej zależy od kierunku prądu w przewodzie. Kierunek linii indukcji magnetycznej wokół przewodnika z prądem można określić za pomocą „zasady świdra”. Jeśli świder (korkociąg) z gwintem prawoskrętnym porusza się do przodu w kierunku prądu, wówczas kierunek obrotu uchwytu będzie zbiegał się z kierunkiem linii indukcji magnetycznej wokół przewodnika. Pole magnetyczne charakteryzuje się wektorem indukcji magnetycznej, który ma określoną wielkość i określony kierunek w przestrzeni. Linia styczna do każdego punktu, który pokrywa się z kierunkiem wektora indukcji magnetycznej, nazywana jest linią indukcji magnetycznej lub linią indukcji magnetycznej. Iloczyn indukcji magnetycznej przez wielkość pola prostopadłego do kierunku pola (wektora indukcji magnetycznej) nazywany jest strumieniem wektora indukcji magnetycznej lub po prostu strumieniem magnetycznym i jest oznaczony literą Ф: Ф = BS. pomiaru to Weber (Wb). Elektrozawór Nazywa się zwinięty przewodnik, przez który przepływa prąd elektryczny. Aby określić bieguny elektrozaworu, posługują się „zasadą świdra”, stosując ją w następujący sposób: jeśli ustawisz świder wzdłuż osi elektrozaworu i obrócisz go w kierunku prądu w zwojach elektrozaworu, wtedy ruch translacyjny świdra wskaże kierunek pola magnetycznego. Solenoid ze stalowym (żelaznym) rdzeniem w środku nazywa się elektromagnes. Pole magnetyczne elektromagnesu jest silniejsze niż elektromagnesu, ponieważ kawałek stali osadzony w elektromagnesie jest namagnesowany i powstałe pole magnetyczne jest wzmacniane. Bieguny elektromagnesu można określić, podobnie jak elektromagnes, zgodnie z „zasadą świdra”. Strumień magnetyczny elektromagnesu (elektromagnesu) wzrasta wraz ze wzrostem liczby zwojów i prądu w nim. Siła magnesowania zależy od iloczynu prądu i liczby zwojów. Możesz zwiększyć strumień magnetyczny elektrozaworu w następujący sposób: 1) włożyć stalowy rdzeń do elektromagnesu, zamieniając go w elektromagnes; 2) zwiększyć przekrój stalowego rdzenia elektromagnesu (ponieważ przy danym prądzie, natężeniu pola magnetycznego, a zatem indukcji magnetycznej, wzrost przekroju prowadzi do wzrostu strumienia magnetycznego); 3) zmniejszyć szczelinę powietrzną elektromagnesu (ponieważ wraz ze spadkiem ścieżki linii magnetycznych przez powietrze zmniejsza się opór magnetyczny). 63. INDUKCJA ELEKTROMAGNETYCZNA Nazywa się zjawisko pola elektromagnetycznego w obwodzie, przez który przechodzi pole magnetyczne Indukcja elektromagnetyczna i została odkryta przez angielskiego fizyka M. Faradeem w 1831 roku Przewodnik przewodzący prąd elektryczny otoczony jest polem magnetycznym. Jeśli zmienisz wielkość lub kierunek prądu w przewodniku lub otworzysz i zamkniesz obwód elektryczny, który dostarcza prąd do przewodnika, wtedy zmieni się pole magnetyczne otaczające przewodnik. Zmieniając się, pole magnetyczne przewodnika przecina ten sam przewodnik i indukuje w nim pole elektromagnetyczne. Zjawisko to nazywa się samoindukcją. Sam indukowany emf nazywa się samoindukcyjnym emfem. Indukowane pole elektromagnetyczne występuje w następujących przypadkach. 1. Kiedy poruszający się przewodnik przecina stałe pole magnetyczne lub odwrotnie, ruchome pole magnetyczne przecina stały przewodnik; lub gdy przewodnik i pole magnetyczne, poruszając się w przestrzeni, poruszają się względem siebie. 2. Kiedy zmienne pole magnetyczne jednego przewodnika, działające na inny przewodnik, indukuje w nim pole elektromagnetyczne. 3. Kiedy zmieniające się pole magnetyczne przewodnika indukuje w nim pole elektromagnetyczne (indukcja własna). Aby określić indukowane pole elektromagnetyczne w przewodniku, stosuje się „zasadę prawej ręki”: jeśli mentalnie umieścisz prawą rękę w polu magnetycznym wzdłuż przewodnika, tak aby linie magnetyczne wychodzące z bieguna północnego weszły w dłoń, a kciuk zgięty zbiega się z kierunkiem ruchu przewodnika, a następnie cztery wyciągnięte palce wskażą kierunek indukowanego emf w przewodniku. Wartość indukowanego emf w przewodzie zależy od: 1) od wielkości indukcji pola magnetycznego, ponieważ im gęstsze są linie indukcji magnetycznej, tym większa ich liczba przekroczy przewodnik w jednostce czasu; 2) o prędkości przewodnika w polu magnetycznym, ponieważ przy dużej prędkości ruchu przewodnik może przekroczyć więcej linii indukcyjnych w jednostce czasu; 3) na roboczej (umieszczonej w polu magnetycznym) długości przewodu, ponieważ długi przewód może przecinać więcej linii indukcyjnych w jednostce czasu; 4) o wartości sinusa kąta między kierunkiem ruchu przewodnika a kierunkiem pola magnetycznego. W 1834 r. rosyjski akademik E.Kh. Lenz podał uniwersalną zasadę określania kierunku indukowanego emf w przewodniku. Ta zasada, znana jako reguła Lenza, jest sformułowana w następujący sposób: kierunek indukowanego emf jest zawsze taki sam, że prąd przez niego i jego pole magnetyczne są w takim kierunku, że mają tendencję do zakłócania przyczyny, która to generuje wywołane emf. Prądy, które są indukowane w ciałach metalicznych, gdy przecinają je linie magnetyczne, nazywane są prądami wirowymi lub prądami Foucaulta. Aby zmniejszyć straty na prądy wirowe, tworniki generatorów, silników elektrycznych i rdzenie transformatorów są składane z oddzielnych cienkich (0,35-0,5 mm) tłoczonych blach ze stali miękkiej, umieszczonych w kierunku linii strumienia magnetycznego i izolowanych od siebie lakierem lub cienki papier. Odbywa się to w celu zmniejszenia wielkości przepływającego przez nią strumienia magnetycznego ze względu na mały przekrój każdej blachy stalowej, a zatem w celu zmniejszenia pola elektromagnetycznego i indukowanego w nim prądu. Prądy wirowe są przydatne. Prądy te są wykorzystywane do hartowania wyrobów stalowych prądami o wysokiej częstotliwości w pracy indukcyjnych elektrycznych przyrządów pomiarowych, mierników i przekaźników prądu przemiennego. 64. ODBIÓR PRĄDU AC Niech między biegunami elektromagnesu powstanie jednorodne pole magnetyczne. Wewnątrz pola pod działaniem siły zewnętrznej metalowy przewodnik prostoliniowy obraca się po okręgu zgodnie z ruchem wskazówek zegara. Przecięcie przewodników linii magnetycznych doprowadzi do pojawienia się indukowanego emf w przewodniku. Wielkość tego pola elektromagnetycznego zależy od wielkości indukcji magnetycznej, aktywnej długości przewodnika, prędkości z jaką przewodnik przecina linie magnetyczne oraz sinusa kąta między kierunkiem ruchu przewodnika a kierunkiem pole magnetyczne. ?= Bł?sin?. Rozkładamy prędkość obwodową na dwie składowe - normalną i styczną względem kierunku indukcji magnetycznej. Składowa normalna prędkości określa indukowaną siłę elektromotoryczną indukcji i jest równa: ?n = ?sin?.Styczna składowa prędkości nie bierze udziału w tworzeniu indukowanej siły elektromotorycznej i jest równa: Podczas ruchu przewodnik zajmie różne pozycje. W przypadku jednego pełnego obrotu przewodnika pole elektromagnetyczne w nim najpierw wzrasta od zera do wartości maksymalnej, następnie zmniejsza się do zera, a zmieniając kierunek, ponownie wzrasta do wartości maksymalnej i ponownie maleje do zera. Przy dalszym ruchu przewodnika zmiany w polu elektromagnetycznym zostaną powtórzone. W obwodzie zewnętrznym będzie płynął prąd o zmiennej wielkości i kierunku. Ten prąd nazywa się zmienne w przeciwieństwie do stały, które dają ogniwa galwaniczne i baterie. Zmienne pola elektromagnetyczne i prąd przemienny okresowo zmieniają swój kierunek i wielkość. Wartość zmiennej (prądu, napięcia i pola elektromagnetycznego) w danym momencie nazywamy wartością chwilową. Największa z chwilowych wartości zmiennej nazywana jest jej wartością maksymalną lub amplitudą i jest oznaczona przez Im, Um. Okres czasu, po którym powtarzają się zmiany zmiennej, nazywany jest okresem T (mierzonym w sekundach). Liczba okresów na jednostkę czasu nazywana jest częstotliwością prądu przemiennego i jest oznaczona przez v (mierzona w hercach). W inżynierii stosuje się prądy o różnych częstotliwościach. Standardowa częstotliwość przemysłowa w Rosji wynosi -50 Hz. Pole elektromagnetyczne w przewodniku jest indukowane zgodnie z prawem sinusoidalnym. Ten EMF nazywa się sinusoidalny. Przemienny prąd sinusoidalny w tym okresie ma różne wartości chwilowe. Działania prądu nie są determinowane ani amplitudą, ani wartościami chwilowymi. Aby ocenić efekt wytwarzany przez prąd przemienny, porównujemy go z efektem cieplnym prądu stałego. Moc prądu stałego przechodząca przez rezystancję będzie wynosić C = I2R. Zależność między wartościami skutecznymi i szczytowymi natężenia prądu a napięciem przemiennym ma postać: Im = I?2, Um = U?2. Efektywna wartość prądu przemiennego jest równa takiemu prądowi stałemu, który przechodząc przez ten sam opór co prąd przemienny, w tym samym czasie uwalnia taką samą ilość energii. 65. OBWODY AC Rozważ obwód składający się z rezystancji R. Dla uproszczenia pomijamy wpływ indukcyjności i pojemności. Do zacisków obwodu przykładane jest napięcie sinusoidalne u = Umsin?t. Zgodnie z prawem Ohma chwilowa wartość prądu będzie wynosić: i \uXNUMXd u / r =(Um / r) sinto = jestem grzechem. Wzór mocy dla obwodu prądu przemiennego z czynną rezystancją jest taki sam jak wzór mocy dla obwodu prądu stałego: P \u2d IXNUMXR Wszystkie przewody mają czynną rezystancję. W obwodzie prądu przemiennego żarniki żarówek, spirale grzejników elektrycznych i reostatów, lampy łukowe i długie proste przewodniki mają praktycznie tylko jedną czynną rezystancję. Rozważ obwód prądu przemiennego zawierający cewkę o indukcyjności L bez stalowego rdzenia. Dla uproszczenia przyjmiemy, że rezystancja czynna cewki jest bardzo mała i można ją pominąć. Z największą prędkością prąd zmienia się wokół wartości zerowych. W pobliżu wartości maksymalnych szybkość zmian prądu maleje, a przy maksymalnej wartości prądu jego wzrost jest równy zeru. Tak więc prąd przemienny zmienia się nie tylko pod względem wielkości i kierunku, ale także szybkości jego zmiany. Prąd przemienny przepływający przez zwoje cewki wytwarza zmienne pole magnetyczne. Linie magnetyczne tego pola, przecinające zwoje własnej cewki, indukują w nich pole elektromagnetyczne samoindukcji. Ponieważ indukcyjność cewki w naszym przypadku pozostaje niezmieniona, pole elektromagnetyczne indukcji własnej będzie zależeć tylko od szybkości zmiany prądu. Największe tempo zmian prądu występuje w pobliżu zerowych wartości prądu. W konsekwencji, EMF samoindukcji ma największą wartość w tych samych momentach. W początkowym momencie prąd gwałtownie i gwałtownie wzrasta od zera, a zatem ma ujemną wartość maksymalną. Ponieważ prąd wzrasta, EMF samoindukcji, zgodnie z zasadą Lenza, powinno zapobiegać zmianom prądu. Dlatego pole elektromagnetyczne indukcji własnej ze wzrostem prądu będzie miało kierunek przeciwny do prądu. Tempo bieżących zmian maleje, gdy zbliża się do maksimum. Dlatego pole elektromagnetyczne indukcji własnej również maleje, aż w końcu przy maksymalnym prądzie, gdy jego zmiany są równe zeru, staje się równe zeru. Prąd przemienny po osiągnięciu maksimum zaczyna się zmniejszać. Zgodnie z zasadą Lenza, SEM samoindukcji zapobiegnie spadkowi prądu i już skierowana w kierunku przepływu prądu będzie go wspierać. Przy kolejnej zmianie prąd przemienny gwałtownie spada do zera. Gwałtowny spadek prądu w cewce pociągnie za sobą również szybki spadek pola magnetycznego, a w wyniku przecięcia linii magnetycznych zwojów cewki zostanie w nich indukowana największa siła elektromotoryczna indukcji własnej . Ponieważ sem indukująca się własna w obwodach prądu przemiennego stale przeciwdziała zmianom prądu, aby umożliwić przepływ prądu przez zwoje cewki, napięcie sieciowe musi zrównoważyć sem indukcyjną własną. Oznacza to, że napięcie sieci w każdym momencie musi być równe i przeciwne do pola elektromagnetycznego indukcji własnej. Wartość XL = ?L nazywa się Reaktywność indukcyjna, co jest rodzajem przeszkody, którą obwód musi zmienić w nim prąd. Wartość XC = 1/(?C) nazywa się rezystancja pojemnościowa, która, podobnie jak reaktancja indukcyjna, zależy od częstotliwości prądu przemiennego. 66. OBWÓD OSCYLACYJNY Rozważmy przypadek uzyskania prądu przemiennego poprzez rozładowanie kondensatora do cewki. Naładowany kondensator ma magazyn energii elektrycznej. Po zwarciu do cewki zacznie się rozładowywać, a dopływ energii elektrycznej w niej zmniejszy się. Prąd rozładowania kondensatora, przechodzący przez zwoje cewki, wytwarza pole magnetyczne. W konsekwencji cewka zacznie gromadzić energię magnetyczną. Gdy kondensator jest całkowicie rozładowany, jego energia elektryczna wyniesie zero. W tym momencie cewka będzie miała maksymalny dopływ energii magnetycznej. Teraz sama cewka staje się generatorem prądu elektrycznego i zaczyna ładować kondensator. Samoindukcyjne emf, które występuje w cewce w okresie wzrostu pola magnetycznego, zapobiegało wzrostowi prądu. Teraz, gdy pole magnetyczne cewki zmniejszy się, pole elektromagnetyczne indukcji własnej ma tendencję do utrzymywania prądu w tym samym kierunku. W momencie, gdy energia magnetyczna cewki stanie się równa zeru, płytki kondensatora będą naładowane odwrotnie do tego, jak były naładowane na początku, a jeśli rezystancja obwodu wynosi zero, to kondensator otrzyma początkowe zasilanie energia elektryczna. Wtedy kondensator otrzyma początkową dostawę energii elektrycznej. Następnie kondensator zacznie się ponownie rozładowywać, tworząc w obwodzie prąd wsteczny, a proces zostanie powtórzony. Naprzemienne przemiany energii elektrycznej w energię magnetyczną i odwrotnie stanowią podstawę procesu oscylacji elektromagnetycznych. Nazywa się obwód składający się z pojemności i indukcyjności, w którym zachodzi proces oscylacji elektromagnetycznych obwód oscylacyjny. Okresowe wahania energii występujące w obwodzie oscylacyjnym mogą trwać w nieskończoność w postaci oscylacji nietłumionych, gdyby nie było strat w samym obwodzie oscylacyjnym. Jednak obecność rezystancji czynnej prowadzi do tego, że zapas energii obwodu zmniejsza się z każdym okresem na skutek strat ciepła w rezystancji czynnej, w wyniku czego oscylacje wygasają. Okres oscylacji elektromagnetycznych występujących w obwodzie oscylacyjnym bez rezystancji określa wzór Thomsona. Istnieją dwa sposoby zmiany czasu okresu oscylacji obwodu - poprzez zmianę indukcyjności cewki lub pojemności kondensatora. Obie metody są wykorzystywane do tego celu w radiotechnice. Obwód oscylacyjny jest niezbędnym akcesorium dla każdego odbiornika radiowego i nadajnika radiowego. Zasada transmisji radiowej jest następująca. Drgania elektromagnetyczne powstają w antenie nadawczej stacji radiowej za pomocą generatorów lampowych. Amplituda drgań zależy od wielu czynników, w tym od natężenia prądu płynącego w obwodzie mikrofonu, który odbiera drgania dźwiękowe wywołane mową lub muzyką. Nazywa się zmiany w drganiach o wysokiej częstotliwości za pomocą drgań dźwiękowych modulacja. Komunikacja radiowa została po raz pierwszy przeprowadzona przez wybitnego rosyjskiego naukowca JAK. Popow (1859-1905). 67. TRÓJFAZOWY AC System wielofazowy nazwany zbiorem o zmiennej EMF o tej samej częstotliwości i przesuniętym w fazie jeden względem drugiego o dowolny kąt. Każdy EMF może działać we własnym obwodzie i nie może być powiązany z innym EMF. Taki system nazywa się niepowiązane. Wadą niesprzężonego systemu wielofazowego jest duża liczba przewodów, równa 2 m. Na przykład do przesyłania energii w systemie trójfazowym potrzeba sześciu przewodów. Układ wielofazowy, w którym poszczególne fazy są ze sobą połączone elektrycznie, nazywany jest sprzężonym układem wielofazowym. Prąd wielofazowy ma ważne zalety: 1) przy przesyłaniu tej samej mocy prądem wielofazowym wymagany jest mniejszy przekrój przewodów niż przy prądzie jednofazowym; 2) za pomocą nieruchomych cewek lub uzwojeń wytwarza wirujące pole magnetyczne wykorzystywane w pracy silników i różnych urządzeń prądu przemiennego. Spośród wielofazowych systemów prądowych, trójfazowy prąd przemienny otrzymał najbardziej praktyczne zastosowanie. Okazuje się, co następuje. Jeśli trzy zwoje zostaną umieszczone w jednolitym polu magnetycznym biegunów, każdy z nich znajduje się pod kątem 120° w stosunku do drugiego, a zwoje są obracane ze stałą prędkością kątową, to w zwojów, które również zostaną przesunięte w fazie o 120 °. W praktyce, aby uzyskać prąd trójfazowy, na stojanie alternatora wykonuje się trzy uzwojenia, przesunięte względem siebie o 120 °. Nazywa się je uzwojeniami fazowymi lub po prostu fazami generatora. W praktyce nie stosuje się niesprzężonego systemu prądu trójfazowego. Uzwojenia fazowe generatorów i odbiorników prądu trójfazowego są połączone zgodnie ze schematem gwiazdy lub trójkąta. Jeżeli uzwojenia fazowe generatora lub odbiornika są połączone w taki sposób, że końce uzwojeń są zamknięte w jednym wspólnym punkcie, a początki uzwojeń są połączone z przewodami liniowymi, wówczas takie połączenie jest nazywane gwiazda. W połączeniu w gwiazdę napięcie sieciowe jest V3 razy większe niż napięcie fazowe. Przy nierównomiernym obciążeniu napięcia fazowe odbiornika różnią się wielkością, a wielkość napięcia fazowego jest proporcjonalna do rezystancji fazowej. Przemieszczenie punktu zerowego konsumenta, które następuje w wyniku nierównomiernego obciążenia, prowadzi do niepożądanego zjawiska w sieciach oświetleniowych. Im większa liczba i moc lamp wchodzących w skład fazy, tym niższa będzie ich rezystancja, im niższe będzie ich napięcie fazowe, tym słabiej się spalą. Oprócz połączenia w gwiazdę można włączyć generatory lub odbiorniki prądu trójfazowego trójkąt. Przy równomiernym obciążeniu delta prąd linii jest V3 razy większy niż prąd fazowy. W silnikach i innych odbiornikach prądu trójfazowego w większości przypadków wszystkie sześć końców trzech uzwojeń jest wyprowadzanych, które w razie potrzeby można połączyć z gwiazdą lub trójkątem. Zwykle płyta z materiału izolacyjnego (płyta zaciskowa) jest przymocowana do maszyny trójfazowej, do której wyprowadza się wszystkie sześć końcówek. Moc układu trójfazowego można obliczyć ze wzoru: P = ?3 IUcos ?. 68. TRANSFORMATORY W 1876 g. LICZBA PI. Jabłoczkow zasugerowałem użycie transformatora do zasilania świec. W przyszłości projekt transformatorów został opracowany przez innego rosyjskiego wynalazcę, mechanika JEŚLI. Usagin, który zasugerował użycie transformatorów do zasilania nie tylko świec Yablochkov, ale także innych odbiorców energii elektrycznej. Transformator jest urządzeniem elektrycznym opartym na zjawisku wzajemnej indukcji i przeznaczonym do zamiany prądu przemiennego o jednym napięciu na prąd przemienny o innym napięciu, ale o tej samej częstotliwości. Najprostszy transformator ma stalowy rdzeń i dwa uzwojenia izolowane zarówno od rdzenia, jak i od siebie. Nazywa się uzwojenie transformatora podłączonego do źródła napięcia uzwojenie pierwotne, a uzwojenie, do którego podłączeni są odbiorcy lub linie przesyłowe prowadzące do odbiorców nazywa się uzwojenie wtórne. Prąd przemienny przepływający przez uzwojenie pierwotne wytwarza zmienny strumień magnetyczny, który blokuje się ze zwojami uzwojenia wtórnego i indukuje w nich siłę elektromotoryczną. Ponieważ strumień magnetyczny jest zmienny, indukowana siła elektromotoryczna w uzwojeniu wtórnym transformatora jest również zmienna, a jej częstotliwość jest równa częstotliwości prądu w uzwojeniu pierwotnym. Zmienny strumień magnetyczny przechodzący przez rdzeń transformatora przecina nie tylko uzwojenie wtórne, ale także uzwojenie pierwotne transformatora. W związku z tym w uzwojeniu pierwotnym zostanie również indukowana siła elektromotoryczna. Wielkość pola elektromagnetycznego indukowanego w uzwojeniach transformatora zależy od częstotliwości prądu przemiennego, liczby zwojów każdego uzwojenia oraz wielkości strumienia magnetycznego w rdzeniu. Przy określonej częstotliwości i stałym strumieniu magnetycznym wartość pola elektromagnetycznego każdego uzwojenia zależy tylko od liczby zwojów tego uzwojenia. Ten związek między wartościami pola elektromagnetycznego a liczbą zwojów uzwojeń transformatora można wyrazić wzorem: Różnica między sem a napięciem jest tak mała, że zależność między napięciami a liczbą zwojów obu uzwojeń można wyrazić wzorem: U1/U2 = N1/N2. Różnica między siłą elektromotoryczną a napięciem w uzwojeniu pierwotnym transformatora staje się szczególnie mała, gdy uzwojenie wtórne jest otwarte i prąd w nim wynosi zero (w stanie spoczynku), a w uzwojeniu pierwotnym płynie tylko niewielki prąd, zwany prądem jałowym . W tym przypadku napięcie na zaciskach uzwojenia wtórnego jest równe indukowanej w nim sem. Liczba pokazująca, ile razy napięcie w uzwojeniu pierwotnym jest większe (lub mniejsze) niż napięcie w uzwojeniu wtórnym, nazywa się współczynnikiem transformacji i jest oznaczana literą k. k = U1 / U2 ? N1 / N2. Napięcie znamionowe uzwojeń wysokiego i niskiego napięcia podane na tabliczce znamionowej transformatora odnosi się do biegu jałowego. Transformatory służące do zwiększania napięcia nazywane są step-up; ich współczynnik transformacji jest mniejszy niż jeden. Transformatory obniżające obniżają napięcie; ich współczynnik transformacji jest większy niż jeden. Tryb, w którym uzwojenie wtórne transformatora jest otwarte, a do zacisków uzwojenia pierwotnego jest przykładane napięcie przemienne, nazywany jest pracą transformatora w stanie bezczynności lub bezczynności. 69. URZĄDZENIE I TYPY TRANSFORMATORÓW Rdzeń (obwód magnetyczny) transformatora tworzy obwód zamknięty dla strumienia magnetycznego i jest wykonany z blachy elektrotechnicznej (transformatorowej) o grubości 0,5 i 0,35 mm. Stal elektryczna to stal zawierająca wagowo 4-4,8% krzemu. Obecność krzemu poprawia właściwości magnetyczne stali i zwiększa jej odporność na prądy wirowe. Poszczególne arkusze stali pokrywane są warstwą lakieru w celu odizolowania ich od siebie, po czym są dokręcane śrubami wsuwanymi w tulejki izolacyjne. Takie urządzenie służy do redukcji prądów wirowych indukowanych w stali przez zmienny strumień magnetyczny. Części obwodu magnetycznego, na które nakłada się uzwojenie, nazywane są prętami. Pręty są połączone górnym i dolnym jarzmem. Zgodnie z konstrukcją obwodu magnetycznego rozróżnia się dwa rodzaje transformatorów: prętowe i zbrojone. W transformatorze prętowym uzwojenia pokrywają pręty rdzenia magnetycznego; w transformatorach zbrojonych obwód magnetyczny przeciwnie, jako „pancerz” obejmuje uzwojenia. W przypadku uszkodzenia uzwojenia transformatora zbrojonego, kontrola jest niewygodna i trudna do naprawy. Dlatego najbardziej rozpowszechnione są transformatory prętowe. Uzwojenie transformatora wykonane jest z izolowanej miedzi okrągłej lub prostokątnej. Wałek izolacyjny (zwykle karton impregnowany lakierem bakelitowym) jest najpierw nakładany na rdzeń obwodu magnetycznego, na którym umieszczone jest uzwojenie niskiego napięcia. Umiejscowienie uzwojenia niskiego napięcia bliżej pręta tłumaczy się tym, że łatwiej go odizolować od pręta stalowego niż uzwojenia wysokiego napięcia. Na nałożone na siebie uzwojenie niskiego napięcia, na którym umieszczone jest uzwojenie wysokiego napięcia, nakładany jest kolejny cylinder izolacyjny. Takie transformatory nazywane są dwuuzwojeniowymi. Istnieją transformatory, które mają jedno uzwojenie pierwotne i dwa uzwojenia wtórne na fazę. Uzwojenie pierwotne jest uzwojeniem o wyższym napięciu. Uzwojenia wtórne, w zależności od wielkości napięcia na ich zaciskach, nazywane są: jedno uzwojeniem średniego napięcia, a drugie uzwojeniem niskiego napięcia. Takie transformatory nazywane są trójuzwojeniowy. Do transformacji prądu trójfazowego można użyć transformatorów jednofazowych. Jeśli połączymy stal trzech rdzeni w jeden wspólny rdzeń, otrzymamy rdzeń transformatora trójfazowego. Koszt stali transformatorowej dla transformatora trójfazowego jest znacznie niższy niż w przypadku instalacji trzech transformatorów jednofazowych. Jeżeli moc potrzebna do transformacji jest większa niż moc jednego transformatora, to w tym przypadku kilka transformatorów jest włączonych do pracy równoległej. Aby możliwa była praca równoległa transformatorów jednofazowych, muszą być spełnione następujące warunki. 1. Napięcia uzwojenia pierwotnego i wtórnego transformatorów połączonych równolegle muszą być równe. W tym przypadku współczynniki transformacji transformatorów również będą równe. 2. Równość napięć zwarciowych. 3. Załączanie tymi samymi fazami od strony napięć wyższych i niższych. Autotransformator to transformator, który ma tylko jedno uzwojenie na rdzeniu. Do różnych punktów tego uzwojenia podłączone są zarówno obwody pierwotne, jak i wtórne. Strumień magnetyczny autotransformatora indukuje siłę elektryczną w uzwojeniu. Ta siła elektromotoryczna jest prawie równa przyłożonemu napięciu. 70. SILNIKI ASYCHRONICZNE maszyna asynchroniczna nazywa się maszynę prądu przemiennego, w której prędkość obrotowa wirnika jest mniejsza niż prędkość obrotowa pola magnetycznego stojana i zależy od obciążenia. Maszyna asynchroniczna, podobnie jak inne maszyny elektryczne, ma właściwość odwracalności, tj. może pracować zarówno w trybie silnikowym, jak i generatorowym. Silnik indukcyjny trójfazowy został wynaleziony przez rosyjskiego inżyniera M.O. Dolivo-Dobrovolsky w 1890 roku i od tego czasu, przechodząc ulepszenia, mocno zajął swoje miejsce w przemyśle i stał się powszechny we wszystkich krajach świata. Silnik indukcyjny składa się z dwóch głównych części - stojan i wirnik. Stojan jest stałą częścią maszyny. Rowki wykonane są po wewnętrznej stronie stojana, gdzie umieszczone jest uzwojenie trójfazowe, zasilane trójfazowym prądem przemiennym. Obrotowa część maszyny nazywana jest wirnikiem, uzwojenie jest również układane w jego rowkach. Stojan i wirnik są zmontowane z oddzielnych tłoczonych blach ze stali elektrotechnicznej o grubości 0,35 i 0,5 mm. Poszczególne arkusze stali izolowane są od siebie warstwą lakieru. Szczelina powietrzna między stojanem a wirnikiem jest tak mała, jak to tylko możliwe. W zależności od konstrukcji wirnika silniki asynchroniczne są wyposażone w wirniki klatkowe i fazowe. Silniki asynchroniczne dzielą się na bezszczotkowe i kolektorowe. Najszerzej stosowane są silniki bezszczotkowe. Stosowane są tam, gdzie wymagana jest w przybliżeniu stała prędkość obrotowa i nie jest wymagana jej regulacja. Silniki bezszczotkowe charakteryzują się prostą konstrukcją, bezawaryjną eksploatacją i wysoką sprawnością. Jeśli połączysz przetwarzanie stojana z trójfazową siecią prądu przemiennego, wówczas wewnątrz stojana powstaje wirujące pole magnetyczne. Linie magnetyczne pola przecinają uzwojenie stałego prądu wirnika i indukują w nim pole elektromagnetyczne. Wirnik podczas swojego obrotu nie jest w stanie dogonić wirującego pola magnetycznego stojana. Jeżeli założymy, że wirnik będzie miał taką samą prędkość obrotową jak pole magnetyczne stojana, to prądy w uzwojeniu wirnika znikną. Wraz z zanikiem prądów w uzwojeniu wirnika ich oddziaływanie z polem stojana ustanie, a wirnik zacznie się obracać wolniej niż wirujące pole stojana. Jednak w tym przypadku przez uzwojenie wirnika zacznie ponownie przechodzić pole wirujące stojana, a moment obrotowy ponownie będzie działał na wirnik. W konsekwencji wirnik podczas swojego obrotu musi zawsze pozostawać w tyle za prędkością obrotową pola magnetycznego stojana, czyli obracać się asynchronicznie (nie w czasie z polem magnetycznym), dlatego silniki te zostały nazwane asynchroniczny. Silnik indukcyjny klatkowy jest najczęściej stosowanym silnikiem elektrycznym w przemyśle. Urządzenie silnika asynchronicznego jest następujące. Na nieruchomej części silnika - stojanie umieszczone jest uzwojenie trójfazowe, zasilane prądem trójfazowym. Początki trzech faz tego uzwojenia są zobrazowane na wspólnej tarczy, zamontowanej na zewnątrz obudowy silnika. Ponieważ prąd przemienny płynie w uzwojeniach stojana, zmienny strumień magnetyczny będzie przechodził przez stal stojana. Aby zmniejszyć prądy wirowe występujące w stojanie, jest on wykonany z oddzielnych tłoczonych arkuszy stali stopowej o grubości 0,35 i 0,5 mm. Wady: trudność w regulacji prędkości obrotowej i duży prąd rozruchowy. Dlatego wraz z nimi stosowane są również silniki asynchroniczne z wirnikiem fazowym. Urządzenie stojana takiego silnika i jego uzwojenie nie różni się od urządzenia stojana silnika z wirnikiem klatkowym. Różnica między tymi dwoma silnikami polega na konstrukcji wirnika. Silnik elektryczny z wirnikiem fazowym posiada wirnik, na którym podobnie jak na stojanie umieszczone są trójfazowe uzwojenia połączone ze sobą gwiazdą. 71. GENERATORY SYNCHRONICZNE Maszyna synchroniczna wywoływana jest maszyna, której prędkość obrotowa jest stała i jest określana przy danej częstotliwości prądu przemiennego przez liczbę par biegunów p: v \u60d XNUMX ·n / p. Zgodnie z zasadą odwracalności, odkrytą przez E .Kh. Lenz, maszyna synchroniczna, może działać zarówno jako generator, jak i jako silnik. Działanie generatorów synchronicznych opiera się na zjawisku indukcji elektromagnetycznej. Ponieważ jest zasadniczo obojętne, czy poruszający się przewodnik przecina stałe pole magnetyczne, czy odwrotnie, ruchome pole przecina stały przewodnik, generatory strukturalnie synchroniczne mogą być wykonane w dwóch rodzajach. W pierwszym z nich bieguny magnetyczne można umieścić na stojanie i zasilać ich uzwojenie prądem stałym, a przewody można nałożyć na wirnik i usunąć z nich za pomocą pierścieni i szczotek z prądem przemiennym. Często ta część maszyny, która wytwarza pole magnetyczne, nazywana jest cewką indukcyjną, a ta część maszyny, w której znajduje się uzwojenie, w której indukowane jest pole elektromagnetyczne, nazywana jest zworą. Dlatego w pierwszym typie generatora cewka indukcyjna jest nieruchoma, a zwora obraca się. Stojan generatora synchronicznego, podobnie jak inne maszyny prądu przemiennego, składa się z rdzenia wykonanego z blach ze stali elektrotechnicznej, w rowkach których ułożone jest uzwojenie prądu przemiennego, oraz ramy - żeliwnej lub spawanej obudowy z blachy stalowej. Uzwojenie stojana umieszczone jest w rowkach wytłoczonych na wewnętrznej powierzchni rdzenia. Izolacja uzwojenia jest wykonywana ze szczególną ostrożnością, ponieważ maszyna zwykle musi pracować przy wysokich napięciach. Jako izolację stosuje się mikanit i taśmę mikanitową. Wirniki maszyn synchronicznych są podzielone na dwa typy: 1) wyraźne bieguny (tj. Z wyraźnymi biegunami); 2) niejawnie biegunowy (tj. z niejawnie wyrażonymi biegunami). Wyraźny wirnik biegunowy jest odkuwką stalową. Do wieńca wirnika przymocowane są bieguny, na które nałożone są cewki wzbudzające połączone szeregowo ze sobą. Końce uzwojenia wzbudzenia są połączone z dwoma pierścieniami zamontowanymi na wale wirnika. Szczotki nakładają się na pierścienie, do których podłączone jest stałe źródło napięcia. Zwykle generator prądu stałego, umieszczony na tym samym wale z wirnikiem i zwany wzbudnikiem, podaje prąd stały do wzbudzenia wirnika. Moc wzbudnicy wynosi 0,25-1% mocy znamionowej generatora synchronicznego. Napięcie znamionowe wzbudnic 60-350 V. Dostępne są również samowzbudne generatory synchroniczne. Prąd stały do wzbudzenia wirnika uzyskuje się za pomocą prostowników selenowych podłączonych do uzwojenia stojana generatora. W pierwszej chwili szczątkowe pole magnetyczne obracającego się wirnika indukuje niewielką zmienną siłę elektromotoryczną w uzwojeniu stojana. Prostowniki selenowe podłączone do napięcia przemiennego dają prąd stały, który wzmacnia pole wirnika, a napięcie generatora wzrasta. Projektując maszyny elektryczne i transformatory, projektanci zwracają dużą uwagę na wentylację maszyn. W przypadku generatorów synchronicznych stosuje się chłodzenie powietrzem i wodorem. 72. URZĄDZENIE GENERATORA DC Generator prądu stałego to maszyna elektryczna, która zamienia energię mechaniczną obracającego go silnika pierwotnego na energię elektryczną prądu stałego, którą maszyna oddaje konsumentom. Generator prądu stałego działa na zasadzie Indukcja elektromagnetyczna. Dlatego głównymi częściami generatora są twornik z umieszczonym na nim uzwojeniem oraz elektromagnesy, które wytwarzają pole magnetyczne. Kotwa ma kształt walca i jest pozyskiwana z oddzielnych wytłoczonych arkuszy stali elektrotechnicznej o grubości 0,5 mm. Arkusze są oddzielone od siebie warstwą lakieru lub cienkiego papieru. Wgłębienia, wytłoczone na obwodzie każdej blachy, tworzą rowki podczas montażu zwory i ściskania blach, w których układane są izolowane przewody uzwojenia twornika. Na wale twornika zamocowany jest kolektor składający się z oddzielnych płyt miedzianych przylutowanych do niektórych miejsc uzwojenia twornika. Płyty kolektora są odizolowane od siebie mikanitem. Kolektor służy do prostowania prądu i kierowania go za pomocą stałych szczotek do sieci zewnętrznej. Elektromagnesy generatorów prądu stałego składają się ze stalowych rdzeni biegunowych przykręconych do ramy. Rama generatora jest odlewana ze stali. W przypadku maszyn o bardzo małej mocy rama jest odlewana wraz z rdzeniami biegunów. W innych przypadkach rdzenie słupów są rekrutowane z oddzielnych arkuszy stali elektrotechnicznej. Na rdzenie nałożone są cewki z izolowanego drutu miedzianego. Prąd stały przepływający przez uzwojenie wzbudzenia wytwarza strumień magnetyczny biegunów. W celu lepszego rozprowadzenia strumienia magnetycznego w szczelinie powietrznej do jarzma przymocowane są zmontowane bieguny z końcówkamiiz pojedynczych blach stalowych. Gdy twornik obraca się w polu magnetycznym o dodatnich wartościach, w przewodzie jego uzwojenia indukowana jest siła elektromotoryczna o zmiennej wielkości i kierunku. Jeśli końce jednego zwoju są przylutowane do dwóch miedzianych pierścieni, na pierścienie nakładane są szczotki podłączone do zewnętrznej sieci, a następnie, gdy zwój obraca się w polu magnetycznym, przemienny prąd elektryczny będzie płynął w obwodzie zamkniętym. To jest podstawa działania alternatorów. Jeśli końce cewki są przymocowane do dwóch miedzianych półpierścieni, odizolowanych od siebie i zwanych płytami kolektora, i zostaną na nie nałożone szczotki, to gdy cewka obraca się w polu magnetycznym, w polu magnetycznym nadal będzie indukowany przemienny EMF. cewka. Jednak w obwodzie zewnętrznym będzie płynął prąd o stałym kierunku o zmiennej wielkości (prąd pulsujący). Linia neutralna lub geometryczna neutralna to linia przechodząca przez środek twornika i prostopadła do osi biegunów. Aktywna strona cewki w tej pozycji przesuwa się wzdłuż linii magnetycznych bez ich przekraczania. Dlatego w cewce nie indukuje się EMF, a prąd w obwodzie wynosi zero. Szerokość szczotki jest większa niż szerokość podziału kolektora utworzonego przez płytkę i szczelinę izolacyjną, a cewka znajdująca się na linii neutralnej jest w tym momencie zwarta. W przypadku generatorów pracujących przy szybko zmieniającym się obciążeniu (dźwigi, walcarki) czasami stosuje się uzwojenie kompensacyjne, które układa się w specjalnie wykonanych w nabiegunnikach rowkach. Kierunek prądu w uzwojeniu kompensacyjnym musi być przeciwny do prądu w przewodach uzwojenia twornika. Na łuku pokrytym nabiegunnikiem pole magnetyczne uzwojenia kompensacyjnego równoważy pole reakcji twornika, zapobiegając zniekształceniu pola maszyny. Uzwojenie kompensacyjne oraz uzwojenie dodatkowych biegunów połączone jest szeregowo z uzwojeniem twornika. 73. TYPY GENERATORÓW PRĄDU STAŁEGO W zależności od metody tworzenia pola magnetycznego generatory prądu stałego dzielą się na trzy grupy: 1) prądnice z magnesami trwałymi lub magnetoelektrycznymi; 2) generatory z niezależnym wzbudzeniem; 3) generatory z samowzbudzeniem. Generatory magnetoelektryczne składają się z jednego lub więcej magnesów trwałych, w polu których obraca się zwora z uzwojeniem. Ze względu na bardzo małą generowaną moc generatory tego typu nie są wykorzystywane do celów przemysłowych. W generatorze z niezależnym wzbudzeniem uzwojenia biegunów zasilane są z zewnętrznego źródła stałego napięcia niezależnego od generatora (generator prądu stałego, prostownik itp.). Uzwojenie wzbudzenia biegunów generatora z samowzbudzeniem jest zasilane ze szczotek twornika samej maszyny. Zasada samowzbudzenia jest następująca. W przypadku braku prądu w uzwojeniu wzbudzenia, twornik generatora obraca się w słabym polu magnetycznym magnetyzmu szczątkowego biegunów. Niezależna siła elektromotoryczna indukowana w uzwojeniu twornika w tym momencie wysyła niewielki prąd do uzwojenia bieguna. Pole magnetyczne biegunów wzrasta, powodując wzrost pola elektromagnetycznego w przewodach twornika, co z kolei spowoduje wzrost prądu wzbudzenia. Będzie to trwało do momentu ustalenia prądu w uzwojeniu wzbudzenia odpowiadającego wartości rezystancji obwodu wzbudzenia. Samowzbudzenie maszyny może nastąpić tylko wtedy, gdy prąd płynący przez uzwojenie biegunów wytworzy pole magnetyczne, które wzmacnia pole magnetyzmu szczątkowego, a dodatkowo rezystancja obwodu wzbudzenia nie przekroczy pewnej określonej wartości. wartość. Generatory samowzbudne, w zależności od sposobu podłączenia uzwojenia pola do uzwojenia twornika, dzielą się na trzy typy. 1. Generator ze wzbudzeniem równoległym (bocznik), w którym uzwojenie wzbudzenia biegunów jest połączone równolegle z uzwojeniem twornika. 2. Generator ze wzbudzeniem szeregowym (seria), w którym uzwojenie wzbudzenia biegunów jest połączone szeregowo z uzwojeniem twornika. 3. Generator o wzbudzeniu mieszanym (złożony), który ma dwa uzwojenia na biegunach: jedno jest połączone równolegle z uzwojeniem twornika, a drugie jest połączone szeregowo z uzwojeniem twornika. Napięcie niezależnie wzbudzonego generatora zmienia się wraz z obciążeniem z dwóch powodów: 1) z powodu spadku napięcia w uzwojeniu twornika i styku przejściowego szczotek; 2) działanie reakcji twornika, prowadzące do zmniejszenia strumienia magnetycznego i pola elektromagnetycznego maszyny. W przypadku generatora z równoległym wzbudzeniem napięcie z obciążeniem zmienia się z trzech powodów: 1) z powodu spadku napięcia w uzwojeniu twornika i styku przejściowego szczotek; 2) z powodu zmniejszenia strumienia magnetycznego spowodowanego działaniem reakcji twornika; 3) pod wpływem dwóch pierwszych powodów napięcie generatora (lub napięcie szczotek twornika) spada wraz z obciążeniem. Generator ze wzbudzeniem szeregowym różni się od generatora ze wzbudzeniem równoległym, ponieważ napięcie pierwszego z nich wzrasta wraz ze wzrostem obciążenia, a drugiego maleje. Generator mieszanych wzbudzeń łączy właściwości generatorów wzbudzeń równoległych i szeregowych. 74. SILNIKI ELEKTRYCZNE Jeśli maszyna prądu stałego jest podłączona do źródła napięcia, to będzie współpracować z silnikiem elektrycznym, czyli zamienia energię elektryczną na energię mechaniczną. Ta właściwość maszyn elektrycznych do pracy zarówno jako generator, jak i jako silnik nazywa się odwracalność. Silnik elektryczny został wynaleziony w 1834 roku przez rosyjskiego akademika B.S. Jacobiego. Urządzenie silników elektrycznych jest takie samo jak generatory. Zasada działania silników elektrycznych prądu stałego opiera się na oddziaływaniu prądu płynącego w uzwojeniu twornika i pola magnetycznego wytwarzanego przez bieguny elektromagnesów. Moc pobierana przez silnik z sieci jest większa niż moc na wale o wielkość strat tarcia w łożyskach, szczotkach na kolektorze, zworach na powietrzu, stratach w stali na skutek histerezy i prądów wirowych, stratach mocy na nagrzewanie uzwojenia silników i reostaty. Sprawność silnika elektrycznego zmienia się wraz z obciążeniem. Przy mocy znamionowej sprawność silników waha się od 70 do 93% w zależności od mocy, prędkości obrotowej i konstrukcji silników. W zależności od połączenia uzwojenia twornika i uzwojenia wzbudzenia silniki elektryczne prądu stałego dzielą się na silniki o wzbudzeniu równoległym, szeregowym i mieszanym. Przewodniki uzwojenia twornika, przez które przepływa prąd, znajdując się w polu magnetycznym wytworzonym przez bieguny, doświadczają siły, pod działaniem której są wypychane z pola magnetycznego. Aby zwora silnika obracała się w dowolnym kierunku, konieczne jest, aby kierunek prądu w przewodzie zmienił się na przeciwny, gdy tylko przewodnik opuści obszar pokrycia jednego bieguna, przecina przewód neutralny linii i wchodzi w obszar zasięgu sąsiedniego, przeciwległego bieguna. Aby skierować prąd w przewodach uzwojenia twornika silnika w momencie, gdy przewody przechodzą przez linię neutralną, stosuje się kolektor. W silniku elektrycznym z równoległym wzbudzeniem uzwojenie pola jest połączone równolegle z siecią, a przy stałej rezystancji obwodu wzbudzenia i napięciu sieci strumień magnetyczny silnika musi być stały. Wraz ze wzrostem obciążenia silnika reakcja twornika osłabia strumień magnetyczny, co prowadzi do pewnego wzrostu prędkości. W praktyce spadek napięcia w uzwojeniu twornika dobiera się tak, aby jego wpływ na prędkość silnika był prawie skompensowany przez reakcję twornika. Charakterystyczną właściwością silnika o wzbudzeniu równoległym jest prawie stała prędkość obrotowa przy zmianie obciążenia na jego wale. W przypadku silników ze wzbudzeniem szeregowym twornik i uzwojenia wzbudzenia są połączone szeregowo. Dlatego prąd płynący przez oba uzwojenia silnika będzie taki sam. Przy niskim nasyceniu stali obwodu magnetycznego silnika strumień magnetyczny jest proporcjonalny do prądu twornika. W silniku elektrycznym o wzbudzeniu mieszanym obecność dwóch uzwojeń na biegunach silnika pozwala na wykorzystanie zalet silników o wzbudzeniu równoległym i mieszanym. Te zalety to stała prędkość i wysoki moment rozruchowy. Sterowanie prędkością silnika przy wzbudzeniu mieszanym odbywa się za pomocą reostatu regulacyjnego zawartego w obwodzie uzwojenia równoległego wzbudzenia. 75. PROSTOWNIKI Generatory silnika rzadko używane i zwykle używają specjalnych urządzeń, które przekształcają prąd przemienny na prąd stały i są nazywane prostowniki. W inżynierii najczęściej stosuje się dwa rodzaje prostowników: 1) prostowniki stałe; 2) prostowniki rtęciowe. Prostowniki stałe nazywane są takimi, w których poszczególne części są wykonane z ciał stałych. Z prostowników stałych tlenek miedzi (cuprox), selen, krzem i german stały się szeroko rozpowszechnione w technologii. Prostowniki rtęciowe to: 1) szkło; 2) metal. Oprócz prostowników stałych i rtęciowych istnieją również prostowniki: mechaniczne, kenotrony, gastrony, elektrolityczne. Kenotrony (prostowniki lampowe) są szeroko stosowane w radiotechnice, znajdują się w większości nowoczesnych odbiorników radiowych zasilanych z sieci prądu przemiennego itp. Prostowniki z tlenku miedzi (cuprox) składają się z trzech warstw: 1) metal, który ma wolne elektrony w wysokim stężeniu; 2) izolujące (blokujące), nie posiadające wolnych elektronów; 3) półprzewodnik posiadający niewielką liczbę wolnych elektronów. Jeżeli na małych warstwach występuje różnica potencjałów, w warstwie blokującej powstaje silne pole elektryczne, które przyczynia się do wyrzucania wolnych elektronów z sąsiednich warstw. W prostownikach selenowych jedną elektrodą jest niklowana żelazna podkładka pokryta cienką warstwą selenu. Druga elektroda to warstwa specjalnego, wysoce przewodzącego stopu bizmutu, cyny i kadmu nałożona na selen. Do tej warstwy dociskana jest stykowa podkładka mosiężna. Aby włączyć element do obwodu, stosuje się płytki stykające się z obiema elektrodami. Na granicy między warstwą przykrywającą a warstwą selenu pojawia się warstwa barierowa. Działanie prostownika rtęciowego opiera się na tzw. zaworowej (jednostronnej) zdolności łuku elektrycznego powstałego w opróżnionym i wypełnionym rtęcią naczyniu do przekazywania prądu tylko w jednym kierunku. Zawór to urządzenie, które ma niską rezystancję dla prądu przewodzenia i wysoką rezystancję dla prądu wstecznego. Dla prądów powyżej 500 A stosowane są prostowniki rtęciowe. Metalowa obudowa prostownika jest chłodzona wodą. Odizolowana od korpusu miseczka katody jest wypełniona rtęcią. Główne anody przechodzą przez tuleje anodowe, które chronią anody przed skroploną rtęcią z jej oparów. Anoda zapłonowa i anody niezależnego wzbudzenia są umieszczone wewnątrz prostownika. Górny koniec anody zapłonowej jest przymocowany do stalowego rdzenia umieszczonego w elektromagnesie. Jeśli zamkniesz obwód prądowy zasilający elektrozawór, to rdzeń zostaje wciągnięty i obniża anodę zapłonową, która jest zanurzona na krótki czas w rtęci, a następnie powraca do poprzedniej pozycji pod działaniem sprężyny. Łuk powstały między anodą zapłonową a rtęcią jest przenoszony na anody wzbudzenia, które podtrzymują łuk, zapobiegając jego wygaśnięciu. Regulacja wyprostowanego napięcia na prostownikach odbywa się za pomocą sekcyjnego transformatora lub autotransformatora, który ma wiele rozgałęzień z uzwojeń. Zmieniając wartość napięcia przemiennego zasilającego prostownik, zmienia się wartość napięcia wyprostowanego. 76. INSTRUMENTY ELEKTRYCZNE Do pomiaru wielkości elektrycznych stosuje się specjalne elektryczne przyrządy pomiarowe. Elektryczne przyrządy pomiarowe znalazły szerokie zastosowanie do racjonalnej eksploatacji, sterowania i ochrony instalacji elektrycznych w różnych sektorach gospodarki narodowej. W elektrycznych przyrządach pomiarowych znajdują się ruchome i stałe części urządzenia. Przejawy prądu elektrycznego, na przykład jego efekty cieplne, magnetyczne i mechaniczne, są podstawą wzajemnego oddziaływania ruchomych i nieruchomych części urządzenia. Powstały moment obrotowy obraca ruchomą część urządzenia wraz ze wskaźnikiem (strzałka). Pod działaniem momentu obrotowego układ ruchomy obraca się o kąt, który jest tym większy, im większa jest mierzona wartość. W przeciwieństwie do momentu obrotowego, musi powstać równy i przeciwny moment przeciwdziałający, ponieważ w przeciwnym razie dla dowolnej wartości mierzonej (oprócz zera) strzałka będzie odchylać się do końca skali, aż się zatrzyma. Zazwyczaj przeciwny moment obrotowy jest generowany za pomocą sprężyn śrubowych z brązu fosforowego. Jak wiadomo, tarcie jest zawsze skierowane przeciwko ruchowi. Dlatego też, gdy ruchoma część urządzenia się porusza, tarcie będzie temu przeszkadzać i zniekształcić odczyty urządzenia. Aby zmniejszyć tarcie, część ruchoma w niektórych konstrukcjach jest montowana na rdzeniach w łożyskach oporowych wykonanych z kamienia o wysokiej twardości (rubin, szafir, agat). Aby chronić rdzenie i łożyska oporowe przed zniszczeniem podczas przenoszenia lub transportu, niektóre urządzenia mają urządzenie o nazwie w klatce, który podnosi ruchomą część i unieruchamia ją. Pod wpływem pewnych przyczyn zmienia się moment przeciwdziałania urządzenia. Na przykład w różnych temperaturach sprężyny śrubowe mają nierówną elastyczność. W takim przypadku strzałka urządzenia odsunie się od podziału zerowego. Do ustawienia strzałki w pozycji zerowej służy urządzenie zwane korektorem. Mechanizm pomiarowy urządzenia zamknięty jest w obudowie, która chroni je przed wpływami mechanicznymi oraz wnikaniem kurzu, wody, gazów. Jednym z warunków dla urządzenia jest szybkie uspokojenie jego części ruchomej, osiągnięte poprzez zamontowanie amortyzatorów wykorzystujących opór mechaniczny medium (powietrze, olej) lub hamowanie indukcyjne magnetyczne. Elektryczne przyrządy pomiarowe wyróżniają się następującymi cechami: 1) charakterem mierzonej wartości; 2) według rodzaju prądu; 3) według stopnia dokładności; 4) zgodnie z zasadą działania; 5) według sposobu uzyskania lektury; 6) charakter wniosku. Oprócz tych cech można również wyróżnić elektryczne przyrządy pomiarowe: 1) metodą montażu; 2) sposób ochrony przed zewnętrznymi polami magnetycznymi lub elektrycznymi; 3) wytrzymałość w związku z przeciążeniami; 4) przydatność do stosowania w różnych temperaturach; 5) wymiary gabarytowe i inne cechy. W zależności od rodzaju prądu, urządzenia dzielą się na urządzenia prądu stałego, urządzenia prądu przemiennego oraz urządzenia prądu stałego i przemiennego. Zgodnie z zasadą działania urządzenia dzielą się na magnetoelektryczne, elektromagnetyczne, elektrodynamiczne (ferrodynamiczne), indukcyjne, termiczne, wibracyjne, termoelektryczne, detektor itp. 77. URZĄDZENIE PRZYRZĄDÓW POMIAROWYCH Urządzenia układu magnetoelektrycznego działają na zasadzie oddziaływania cewki z prądem i polem magnesu trwałego. Silny trwały magnes podkowy wykonany ze stali kobaltowej, wolframowej lub niklowo-aluminiowej wytwarza pole magnetyczne. Na końcach magnesu znajdują się nabiegunniki wykonane z miękkiej stali z cylindrycznymi rowkami. Pomiędzy nabiegunnikami zamocowany jest stalowy cylinder, który służy do zmniejszenia rezystancji obwodu magnetycznego. Linie magnetyczne opuszczają nabiegunniki, a ponieważ przepuszczalność magnetyczna stali jest znacznie większa niż powietrza, radykalnie wnikają do cylindra, tworząc w szczelinie powietrznej prawie jednorodne pole magnetyczne. To samo pole powstaje, gdy linie magnetyczne wychodzą z cylindra. Cylinder otoczony jest lekką aluminiową ramą z nawiniętym na nią uzwojeniem (cewką), wykonaną z izolowanego drutu miedzianego. Rama osadzona jest na osi leżącej w łożyskach oporowych. Do osi przymocowana jest również aluminiowa strzała. Moment przeciwdziałający tworzą dwie płaskie sprężyny śrubowe, które jednocześnie służą do zasilania prądem uzwojenia urządzenia. Urządzenia elektromagnetyczne działają na zasadzie oddziaływania prądu cewki z polem magnetycznym poruszającego się rdzenia wykonanego z materiału ferromagnetycznego. Z założenia urządzenia elektromagnetyczne dzielą się na dwa typy: urządzenia z cewką płaską i urządzenia z cewką okrągłą. Zasada działania urządzeń elektrodynamicznych opiera się na interakcji pól magnetycznych dwóch cewek: jednej nieruchomej i drugiej siedzącej na osi i obracającej się. Zasada działania urządzeń termicznych polega na wydłużeniu metalowej nici pod wpływem nagrzewania prądem, która jest następnie zamieniana na ruch obrotowy ruchomej części urządzenia. Indukcyjne przyrządy pomiarowe charakteryzują się zastosowaniem kilku nieruchomych cewek, zasilanych prądem zmiennym i wytwarzających wirujące lub działające pole magnetyczne, które indukuje prądy w ruchomej części przyrządu i powoduje jej ruch. Urządzenia indukcyjne są używane tylko z prądem przemiennym jako watomierze i liczniki energii elektrycznej. Zasada działania urządzeń układu termoelektrycznego opiera się na wykorzystaniu siły elektromotorycznej, która powstaje w obwodzie składającym się z różnych przewodników, jeśli złącze tych przewodników ma temperaturę inną niż temperatura reszty obwodu. Urządzenia systemu detektorów są kombinacją magnetoelektrycznego urządzenia pomiarowego i jednego lub więcej prostowników półprzewodnikowych (detektorów) połączonych ze sobą w jeden obwód. Prostowniki z tlenku miedzi są zwykle używane jako prostowniki. Przyrządy wibracyjne charakteryzują się zastosowaniem szeregu strojonych płytek o różnych okresach drgań własnych i pozwalających na pomiar częstotliwości w wyniku rezonansu częstotliwości płytki oscylacyjnej z mierzoną częstotliwością. Urządzenia wibracyjne są budowane wyłącznie jako mierniki częstotliwości. 78. TRANSFORMATORY INSTRUMENTALNE W sieciach prądu przemiennego przekładniki napięciowe i prądowe służą do oddzielenia przyrządów pomiarowych ze względów bezpieczeństwa od przewodów wysokiego napięcia, a także do rozszerzenia zakresu pomiarowego przyrządów. Aby zapewnić wysoką dokładność pomiaru, przekładniki napięciowe (prądowe) nie powinny zmieniać swojej przekładni i mieć stały kąt 180 między pierwotnym i wtórnym wektorem napięcia (prądu). Ostatni warunek jest konieczny przy włączaniu takich urządzeń przez przekładniki napięciowe (prądowe), których odczyty zależą od kąta przesunięcia między napięciem a prądem sieci. Jednak w praktyce przekładniki napięciowe (prądowe) mają tzw. błąd przekładni i błąd kątowy. Błąd względny przekładni jest różnicą między napięciem wtórnym (prądem) pomnożonym przez przekładnię a rzeczywistą wartością napięcia pierwotnego (prądu). Błąd kątowy transformatora pomiarowego napięcie (prąd) to kąt między pierwotnym wektorem napięcia (prądu) a wtórnym wektorem napięcia (prądu) obrócony o 180. Błąd przekładni i błąd kątowy wzrastają wraz z obciążeniem. Dlatego transformatory nie mogą być obciążane powyżej mocy nominalnej (wskazanej w paszporcie). Uzwojenia pierwotne i wtórne przekładnika napięciowego pomiarowego wykonane są z izolowanego drutu miedzianego i nałożone na zamknięty rdzeń złożony z oddzielnych blach transformatorowych. Przekładniki napięciowe produkowane są jednofazowe i trójfazowe. Aby chronić transformator przed przeciążeniami i zwarciami w obwodzie przyrządu pomiarowego, w uzwojeniu wtórnym znajduje się bezpiecznik niskonapięciowy. W przypadku uszkodzenia izolacji uzwojenia wysokiego napięcia rdzeń i uzwojenie wtórne mogą otrzymać wysoki potencjał. Aby tego uniknąć, uzwojenie wtórne i metalowe części transformatora są uziemione. Przekładniki prądowe służą do konwersji dużego prądu na mały prąd. Na rdzeniu nawinięte są dwa uzwojenia, zmontowane z oddzielnych arkuszy stali transformatorowej: pierwotne, składające się z niewielkiej liczby zwojów, połączone szeregowo z obwodem, przez który przepływa mierzony prąd, oraz wtórne, składające się z dużej liczby zwojów, do których podłączone są przyrządy pomiarowe. Podczas pomiaru prądu w sieciach wysokiego napięcia przyrządy pomiarowe są odseparowane i izolowane od przewodów wysokiego napięcia. Uzwojenie wtórne przekładnika prądowego jest zwykle wykonywane dla prądu 5 A (czasami 10 A), pierwotne prądy znamionowe mogą wynosić od 5 do 15 000 A. Stosunek prądu pierwotnego do wtórnego, który jest w przybliżeniu równy odwrotnemu stosunkowi zwojów uzwojeń, nazywany jest współczynnikiem transformacji prądu. Nominalny współczynnik transformacji jest wskazany w paszporcie transformatora w postaci ułamka, w liczniku którego wskazany jest znamionowy prąd pierwotny, aw mianowniku - znamionowy prąd wtórny. 79. REOSTATY W praktyce elektrycznej, a także w eksploatacji maszyn elektrycznych stosuje się różne reostaty. Reostat to urządzenie, które ma pewną rezystancję, którą można zmienić, zmieniając w ten sposób prąd i napięcie obwodu. Dostępne są reostaty ze stykiem ślizgowym, dźwignią, cieczą, lampą i wtyczką. Reostat ze stykiem ślizgowym. Na porcelanowej rurce nawinięty jest goły drut. W wyniku specjalnej obróbki powierzchnia drutu pokryta jest cienką warstwą tlenku, która nie przewodzi prądu. Suwak przesuwa się po metalowym pręcie, dociskając drut reostatu. Ponieważ część rezystancji reostatu jest włożona szeregowo z lampą elektryczną, prąd przepływający przez żarnik lampy zostanie zmniejszony, a lampa w tym przypadku będzie się mniej paliła. Przesuwając suwak w prawo zmniejszymy opór reostatu, a natężenie światła lampy wzrośnie. Przesuwne reostaty kontaktowe są stosowane tam, gdzie wymagana jest płynna, powolna zmiana prądu w obwodzie. Reostat dźwigniowy. Spirale druciane są rozciągnięte na ramie z materiału izolacyjnego. Spirale są połączone szeregowo. Rozgałęzienia do styków wykonane są od początku, końca i skrzyżowań poszczególnych spiral. Umieszczając dźwignię na określonym styku reostatu, możemy zmienić rezystancję, a wraz z nią prąd w obwodzie. Jednak zmiany te nie zachodzą płynnie, ale nagle. Najpopularniejszymi materiałami na reostaty drutowe są żelazo, nikiel, konstantan, manganina i nichrom. Reostat płynny. Reostat to metalowe naczynie z roztworem sody. Na zawiasie zamocowana jest dźwignia, na której znajduje się żelazny lub miedziany nóż. Dźwignia z nożem jest odizolowana od metalowego pudełka uszczelką. Podnosząc lub opuszczając nóż do roztworu sody możemy zmienić prąd w obwodzie. Opuszczając nóż do roztworu, zwiększamy powierzchnię styku noża z roztworem oraz zwiększamy prąd przepływający przez reostat. Przy dalszym zanurzeniu noża styk rękojeści wejdzie w zacisk na metalowej obudowie i reostat zostanie zwarty, czyli wyłączony z pracy. Reostaty płynne są stosowane w obwodach o wysokich prądach. Reostat lampy. Przedstawia zestaw kilku lamp elektrycznych połączonych równolegle. Wiadomo, że jeśli jedna żarówka ma rezystancję 150 omów, to dwie takie same lampy będą miały całkowitą rezystancję tylko 75 omów, trzy lampy - 50 omów itp. Zatem całkowita rezystancja kilku identycznych lamp połączonych równolegle będzie równa rezystancji jednej lampy podzielonej przez liczbę połączonych lamp. Wtyczkowe reostaty. Często określane jako skrzynki oporowe, reprezentują zestaw określonych, precyzyjnie dostrojonych oporów. Końce cewek oporowych są przymocowane do przyciętego pręta miedzianego. Po włożeniu miedzianej wtyczki w wycięcia pręta łączy ona dwie sąsiednie części pręta. W ten sposób opór połączony końcami z sąsiednimi częściami pręta jest wyłączony z obwodu lub, jak mówią, zwarty (zwarty). Wyjęta wtyczka powoduje przepływ prądu elektrycznego przez cewkę oporową. Skrzynki rezystancyjne ułatwiają uwzględnienie w obwodzie rezystancji o ściśle określonej wartości i znajdują zastosowanie w pomiarach elektrycznych. 80. POMIAR MOCY ELEKTRYCZNEJ CZYNNEJ Waszyngton Ze wzoru na moc prądu stałego P = UI widać, że określenie mocy można wykonać mnożąc wskazania amperomierza i woltomierza. Jednak w praktyce pomiar mocy jest zwykle przeprowadzany za pomocą specjalnych przyrządów - watomierze. Watomierz składa się z dwóch cewek: stałej, składającej się z niewielkiej liczby zwojów grubego drutu i ruchomej, składającej się z dużej liczby zwojów cienkiego drutu. Gdy watomierz jest włączony, prąd obciążenia przepływa przez nieruchomą cewkę połączoną szeregowo w obwodzie, a ruchoma cewka jest podłączona równolegle do odbiornika. Aby zmniejszyć pobór mocy w uzwojeniu równoległym i zmniejszyć ciężar ruchomej cewki, połączony jest z nią szeregowo dodatkowy opór manganinowy. W wyniku oddziaływania pól magnetycznych cewek ruchomych i nieruchomych powstaje moment obrotowy proporcjonalny do prądów obu cewek. Moment obrotowy urządzenia jest proporcjonalny do mocy pobieranej w obwodzie. Aby strzałka urządzenia odbiegała od zera w prawo, konieczne jest przepuszczenie prądu przez cewkę w określonym kierunku. Oprócz watomierzy elektrodynamicznych, watomierze układu ferrodynamicznego służą również do pomiaru mocy w obwodach prądu stałego. Prąd przemienny jednofazowy. Gdy watomierz elektrodynamiczny jest podłączony do obwodu prądu przemiennego, pola magnetyczne cewek ruchomych i nieruchomych, oddziałując ze sobą, powodują obrót ruchomej cewki. Chwilowy moment obrotu ruchomej części urządzenia jest proporcjonalny do iloczynu chwilowych wartości prądów w obu cewkach urządzenia. Jednak ze względu na gwałtowne zmiany prądów układ ruchomy nie będzie w stanie nadążać za tymi zmianami, a moment obrotu urządzenia będzie proporcjonalny do średniej lub mocy czynnej P = U I cos?. Do pomiaru mocy prądu przemiennego stosuje się również watomierze układu indukcyjnego. Podczas pomiaru mocy za pomocą watomierza w sieciach niskiego napięcia o dużych prądach stosuje się przekładniki prądowe. Aby zmniejszyć różnicę potencjałów między uzwojeniami watomierza, obwody pierwotne i wtórne przekładnika prądowego mają wspólny punkt. Uzwojenie wtórne transformatora nie jest uziemione, ponieważ oznaczałoby to uziemienie jednego przewodu sieci. Aby określić moc sieci w tym przypadku, należy pomnożyć odczyt watomierza przez współczynnik transformacji transformatora. Prąd przemienny trójfazowy. Przy równomiernym obciążeniu systemu trójfazowego do pomiaru mocy używany jest jeden watomierz jednofazowy. W tym przypadku prąd fazowy przepływa przez szeregowe uzwojenie watomierza, a uzwojenie równoległe jest połączone z napięciem fazowym. Dlatego watomierz pokaże moc jednej fazy. Aby uzyskać moc systemu trójfazowego, należy pomnożyć odczyt watomierza jednofazowego przez trzy. W sieciach wysokiego napięcia trójfazowy watomierz włączany jest za pomocą przekładników pomiarowych napięcia i prądu. 81. POMIAR AKTYWNEJ ENERGII ELEKTRYCZNEJ Waszyngton Do pomiaru zużycia energii przy prądzie stałym wykorzystywane są mierniki trzech układów: elektrodynamicznego, magnetoelektrycznego i elektrolitycznego. Najbardziej rozpowszechnione liczniki układu elektrodynamicznego. Cewki prądu stałego, składające się z niewielkiej liczby zwojów grubego drutu, są połączone szeregowo z siecią. Ruchoma cewka o kulistym kształcie, zwana twornikiem, jest zamontowana na osi, która może obracać się w łożyskach oporowych. Uzwojenie twornika składa się z dużej liczby zwojów cienkiego drutu i jest podzielone na kilka sekcji. Końce sekcji są przylutowane do płyt kolektora, których dotykają metalowe płaskie szczotki. Napięcie sieciowe dostarczane jest do uzwojenia twornika poprzez dodatkową rezystancję. Podczas pracy miernika w wyniku oddziaływania prądu w uzwojeniu twornika i strumienia magnetycznego stałych prądów cewek wytwarza moment obrotowy, pod wpływem którego zwora zacznie się obracać. Ilość energii zużywanej w sieci można ocenić na podstawie liczby obrotów wykonanych przez twornik (dysk). Ilość energii na obrót twornika nazywana jest stałą licznika. Liczba obrotów twornika na jednostkę zarejestrowanej energii elektrycznej nazywana jest przełożeniem. Prąd przemienny jednofazowy. Do pomiaru energii czynnej w jednofazowych obwodach prądu przemiennego stosuje się mierniki układu indukcyjnego. Urządzenie miernika indukcyjnego jest prawie takie samo jak urządzenie watomierza indukcyjnego. Różnica polega na tym, że miernik nie posiada sprężyn, które wytwarzają moment przeciwdziałający, dzięki czemu tarcza miernika może się swobodnie obracać. Strzałkę i skalę watomierza zastępuje w liczniku mechanizm zliczający. Magnes stały, który służy w watomierzu do uspokojenia, wytwarza w mierniku moment hamowania. Prąd przemienny trójfazowy. Energię czynną trójfazowego prądu przemiennego można mierzyć za pomocą dwóch jednofazowych liczników włączonych w obwód zgodnie z obwodem podobnym do dwóch watomierzy. Wygodniej jest mierzyć energię trójfazowym licznikiem energii czynnej, który łączy działanie dwóch liczników jednofazowych w jednym urządzeniu. Obwód przełączający dwuelementowego trójfazowego licznika energii czynnej jest taki sam jak obwód odpowiedniego watomierza. W czteroprzewodowej trójfazowej sieci prądowej do pomiaru energii czynnej stosuje się obwód podobny do trzech watomierzy lub stosuje się trójelementowy licznik trójfazowy. W sieciach wysokiego napięcia liczniki włącza się za pomocą przekładników napięciowych i prądowych. Energię bierną prądu jednofazowego można określić, odczytując amperomierz, woltomierz, licznik fazy i stoper. Aby uwzględnić energię bierną w sieciach prądu trójfazowego, można zastosować normalne liczniki energii czynnej i specjalne liczniki energii biernej. Rozważ urządzenie specjalnego trójfazowego licznika energii biernej. Urządzenie pomiarowe tego typu jest takie samo jak urządzenie dwuelementowego trójfazowego watomierza. Do sieci podłączone są równoległe uzwojenia dwóch elementów. Nie dwa, ale cztery uzwojenia szeregowe nakładają się na rdzenie w kształcie litery U. Ponadto jedno uzwojenie szeregowe jest nawinięte na jedną z gałęzi rdzenia w kształcie litery U pierwszego elementu. Drugie uzwojenie prądowe jest umieszczone na drugiej gałęzi rdzenia pierwszego układu, a trzecie uzwojenie prądowe jest umieszczone na pierwszej gałęzi drugiego układu. Czwarte uzwojenie prądowe jest umieszczone na drugiej gałęzi rdzenia w kształcie litery U drugiego elementu. 82. NAPĘD ELEKTRYCZNY Silnik i przekładnia napędzają siłownik. Dlatego te dwie części maszyny nazywają się prowadzić. Jeśli do napędzania pracującej maszyny używany jest silnik elektryczny, wówczas taki napęd nazywa się napędem elektrycznym lub w skrócie napędem elektrycznym. Za pierwsze praktyczne zastosowanie napędu elektrycznego należy uznać jego zastosowanie na łodzi przez akademika B.S. Jacobi w 1838 r. Na łodzi zainstalowano silnik elektryczny, zasilany baterią galwaniczną. Stosowane w produkcji napędy elektryczne można podzielić na trzy główne typy: grupowe, jednosilnikowe i wielosilnikowe. Grupowy napęd elektryczny składa się z jednego silnika elektrycznego, który poprzez przekładnię i napęd licznika wprawia w ruch kilka siłowników. Przeciwnapęd to krótki wałek ułożyskowany. Na wale znajduje się koło pasowe stopniowane, koło pasowe robocze (połączone z wałem) i koło pasowe luźne (luźno osadzone na wale). Przeciwnapęd umożliwia zmianę prędkości obrotowej maszyny (za pomocą koła pasowego stopniowanego), zatrzymanie i uruchomienie maszyny (za pomocą koła pasowego roboczego lub jałowego). Zatrzymanie silnika napędowego prowadzi do ustania wszystkich siłowników, które otrzymują od niego energię mechaniczną. Gdy tylko część siłowników pracuje, napęd grupowy ma niską sprawność. Pojedynczy siłownik elektryczny składa się z silnika elektrycznego, który napędza oddzielny siłownik. W jeden napęd wyposażone są wiertarki jednowrzecionowe, tokarki małej mocy itp. Początkowo przeniesienie ruchu z silnika na maszynę odbywało się za pomocą przeciwnapędu. Następnie sam silnik elektryczny został poddany zmianom konstrukcyjnym i zaczął być zintegrowany z siłownikiem. Taki pojedynczy dysk nazywa się indywidualny. Napęd wielosilnikowy składa się z kilku silników elektrycznych, z których każdy służy do napędzania poszczególnych elementów siłownika. Napędy wielosilnikowe są stosowane w złożonych maszynach do obróbki metali o dużej mocy, walcowniach, maszynach papierniczych, dźwigach oraz innych maszynach i mechanizmach. W zależności od rodzaju prądu napęd elektryczny dzieli się na napęd elektryczny prądu stałego i napęd elektryczny prądu przemiennego. W zależności od sposobu podłączenia twornika i uzwojeń wzbudzenia silniki prądu stałego wyróżnia się wzbudzeniem równoległym, szeregowym i mieszanym. Przy określaniu mocy maszyny rozróżnia się trzy tryby pracy. 1. Praca ciągła charakteryzuje się pracą, w której okres pracy jest tak długi, że nagrzewanie się maszyny osiąga stan ustalony. 2. Krótkotrwała praca charakteryzuje się tym, że w okresie eksploatacji temperatura silnika nie ma czasu na osiągnięcie stanu ustalonego. 3. Przerywany tryb pracy charakteryzuje się naprzemiennymi okresami pracy i przerwami. Czas trwania jednego okresu pracy i jednej przerwy nie powinien przekraczać 10 minut. Tryb pracy przerywanej zależy od względnej długości okresu pracy. 83. IZOLACJA, PROJEKTY I CHŁODZENIE MASZYN ELEKTRYCZNYCH Moc silnika zależy od jego ogrzewania. Dopuszczalne nagrzewanie się maszyny jest ograniczone odpornością cieplną materiałów izolacyjnych, a także układem chłodzenia silnika. Materiały izolacyjne stosowane w maszynach elektrycznych dzielą się na pięć klas. Klasa izolacji A. Obejmuje tkaniny bawełniane, jedwab, przędzę, papier i inne materiały organiczne impregnowane różnymi olejami, a także emalie i lakiery. Klasa izolacji B. Obejmuje to produkty wykonane z miki, azbestu i innych materiałów nieorganicznych zawierających spoiwa organiczne. Klasa izolacji BC. Składa się z miki, przędzy szklanej i azbestu na żaroodpornych lakierach. Klasa izolacji CB. Składa się z materiałów nieorganicznych na lakierach żaroodpornych bez użycia materiałów izolacyjnych klasa A. Klasa izolacji C. Obejmuje mikę, porcelanę, szkło, kwarc i inne materiały nieorganiczne bez spoiw. Najwyższa dopuszczalna temperatura ogrzewania izolacji klasa A-105o, dla klasa B-120o, dla klasa samolotu -135o, dla klasa st nieco wyższa, w zależności od odporności cieplnej zastosowanych lakierów, dla klasa C temperatura nie jest ustawiona. Zgodnie z metodą ochrony przed wpływem środowiska zewnętrznego rozróżnia się następujące formy wykonania maszyn elektrycznych. 1. Otwórz maszynę elektryczną. Części wirujące i przewodzące prąd maszyny w tej wersji nie są zabezpieczone przed przypadkowym kontaktem i przedostaniem się na nie ciał obcych. 2. Chroniona maszyna elektryczna. Części wirujące i przewodzące prąd takiej maszyny są chronione przed dotykiem i ciałami obcymi. 3. Kroploszczelna maszyna elektryczna. Wewnętrzne części takiej maszyny są zabezpieczone przed wnikaniem kropli wody spadającej pionowo. 4. Odporna na zachlapanie maszyna elektryczna. Części wewnętrzne maszyny zabezpieczone są przed bryzgami wody spadającymi pod kątem 45 ok od pionu z dowolnej strony. 5. Zamknięta maszyna elektryczna. Wewnętrzne części maszyny tej konstrukcji są oddzielone od środowiska zewnętrznego, ale nie tak ciasno, aby można je było uznać za hermetyczne. Ta maszyna jest używana w zakurzonym środowisku i może być instalowana na zewnątrz. 6. Wodoodporna maszyna elektryczna. Przestrzeń wewnętrzna maszyny jest zabezpieczona przed wnikaniem do niej wody podczas zalewania maszyny z węża. Stosowany w instalacjach okrętowych. 7. Maszyna elektryczna przeciwwybuchowa. Zamknięta maszyna zaprojektowana w taki sposób, aby mogła wytrzymać wybuch wewnątrz niej gazów zawartych w środowisku zewnętrznym. 8 ... Maszyna hermetyczna. Całkowicie zamknięta maszyna, w której wszystkie otwory są zamknięte tak szczelnie, że przy pewnym ciśnieniu zewnętrznym wykluczona jest jakakolwiek komunikacja między wnętrzem maszyny a medium gazowym i cieczą otaczającym maszynę z zewnątrz. Zgodnie z metodą chłodzenia maszyny dzielą się na następujące typy. 1. Maszyny free-coolingowe bez dedykowanych wentylatorów. Cyrkulacja powietrza chłodzącego odbywa się dzięki działaniu wentylacyjnemu wirujących części maszyn oraz zjawisku konwekcji. 2. Maszyny ze sztucznym wyciągiem lub wymuszoną wentylacją, w których obieg gazu chłodzącego nagrzane części jest wspomagany przez specjalny wentylator, w tym: maszyny samowentylujące z wentylatorem na wale (zabezpieczonym lub zamkniętym); maszyny z niezależną wentylacją, których wentylator napędzany jest silnikiem zewnętrznym (maszyny zamknięte). 84. OCHRONA SILNIKÓW ELEKTRYCZNYCH Aby uniknąć uszkodzenia izolacji silnika i uszkodzenia integralności uzwojeń i połączeń elektrycznych, silniki muszą być wyposażone w urządzenia zabezpieczające, które zapewnią ich terminowe odłączenie od sieci. Najczęstszymi przyczynami nieprawidłowej pracy silnika są przeciążenia, zwarcia, podnapięcie lub zanik napięcia. Przeciążać nazywamy wzrostem prądu silnika ponad wartość nominalną. Przeciążenia mogą być niewielkie i krótkotrwałe. Przeciążenia mogą być nadmierne i długotrwałe - są niebezpieczne dla uzwojeń silnika, ponieważ duża ilość ciepła generowanego przez prąd może zwęglić izolację i spalić uzwojenia. Niebezpieczne dla silnika są również zwarcia, które mogą wystąpić w jego uzwojeniach. Nazywa się ochroną silników przed przeciążeniami i zwarciami zabezpieczenie nadprądowe. Maksymalną ochronę zapewniają bezpieczniki, przekaźniki prądowe, przekaźniki termiczne. Wybór określonych urządzeń ochronnych zależy od mocy, typu i przeznaczenia silnika, warunków rozruchu i charakteru przeciążeń. Bezpieczniki to urządzenia z drutem niskotopliwym wykonanym z miedzi, cynku lub ołowiu i zamontowane na podstawie izolacyjnej. Celem bezpieczników jest odłączenie odbiornika od sieci w przypadku niedopuszczalnie dużego przeciążenia lub zwarcia. Bezpieczniki mają stosunkowo małą moc, którą bezpieczniki lub jakiś rodzaj urządzenia odłączającego mogą odciąć bez niebezpieczeństwa uszkodzenia lub zniszczenia, zwaną ostateczną mocą wyłączania. Bezpieczniki to korek, płytka i rurka. Bezpieczniki lustrzane produkowane są na napięcia do 500 V i prądy od 2 do 60 A i służą do ochrony sieci oświetleniowych oraz silników elektrycznych małej mocy. Bezpieczniki płytkowe, które mają poważne wady (rozpryskiwanie się metalu wkładki podczas wypalania, trudności w ich wymianie), są obecnie próbowane do niestosowania. Bezpieczniki rurkowe niskonapięciowe produkowane są na napięcia do 500 V i prądy od 6 do 1000 A. Strukturalnie bezpieczniki rurkowe mogą być wykonane z otwartą rurką porcelanową oraz z zamkniętą rurką szklaną, włóknistą lub porcelanową. Przepuszczone przez nie rury z topliwymi ogniwami są często pokryte piaskiem kwarcowym. W momencie przepalenia bezpiecznika piasek rozbija łuk elektryczny na szereg małych łuków, dobrze chłodzi łuk i szybko gaśnie. W obwodach elektrycznych prądu stałego i przemiennego o napięciu do 500 V stosuje się automatyczne wyłączniki powietrzne lub po prostu automaty. Zadaniem maszyn jest otwieranie obwodów elektrycznych w przypadku przeciążenia lub zwarcia. Główną częścią przekaźnika termicznego jest płyta bimetaliczna. Pod wpływem ciepła elementu grzejnego płyta bimetaliczna odkształca się, która poprzez zginanie zwalnia zatrzask. Pod działaniem sprężyny zatrzask obraca się wokół osi i za pomocą pręta otwiera normalnie zamknięte styki obwodu pomocniczego przekaźnika. Zatrzask powraca do swojej pierwotnej pozycji za pomocą przycisku powrotu. Element grzejny przekaźnika termicznego dobierany jest zgodnie z prądem znamionowym silnika. 85. STYCZNIKI I STEROWNIKI Do zdalnego i automatycznego sterowania silnikami elektrycznymi, styczniki. W zależności od rodzaju prądu styczniki są prądu stałego i przemiennego. W styczniku prądu stałego obwód mocy zamknięty przez stycznik przechodzi przez styki zamontowane na podstawie izolacyjnej, styki samego stycznika i elastyczne połączenie przewodzące prąd. Stycznik zamykany jest elektromagnesem, którego uzwojenie jest zasilane z pomocniczego obwodu sterującego. Gdy obwód sterujący jest zamknięty, elektromagnes przyciąga zworę, która zamyka styki stycznika. Stycznik jest utrzymywany w pozycji włączonej tak długo, jak obwód uzwojenia elektromagnesu jest zamknięty. Styczniki prądu stałego KP zbudowane są z jednego, dwóch i trzech styków głównych pracujących w obwodach prądu stałego o napięciu 220, 440 i 600 V. Prądy znamionowe, na które zaprojektowane są styki główne wynoszą od 20 do 250 A. Cewka elektromagnesu KP styczniki przeznaczone są na napięcie 48, 110 i 220 V. Oprócz styków głównych służących do zamykania i otwierania obwodów mocy, styczniki wyposażone są w styki pomocnicze do obwodów sygnalizacyjnych i innych celów. Styczniki KP umożliwiają do 240-1200 przełączeń na godzinę. Cewki łączeniowe styczników prądu przemiennego produkowane są na napięcia 127, 220, 380 i 500 V przy częstotliwości 50 Hz. Styczniki te umożliwiają do 120 przełączeń na godzinę. Aby uruchomić silniki, zmień kierunek obrotów, kontroluj prędkość i zatrzymaj silniki, urządzenia zwane kontrolerów. W zależności od rodzaju kontrolerów prądu są DC i AC. Kontrolery, których styki są zawarte w obwodach mocy silników elektrycznych, nazywane są kontrolerami mocy. Istnieją sterowniki, które zamykają obwody sterujące urządzeń elektromagnetycznych, a te z kolei zamykają i otwierają obwody mocy silników elektrycznych. Tacy kontrolerzy nazywają się kontrolerów. W zależności od konstrukcji układu stykowego, kontrolerami mogą być bębny i krzywki. Wał kontrolera bębna obracany jest za pomocą pokrętła. Na izolowanym od niego wale zamocowane są miedziane płytki w postaci segmentów i będących ruchomymi stykami. Segmenty mogą mieć różne długości i być przesunięte względem siebie pod pewnym kątem. Niektóre segmenty są połączone elektrycznie. Gdy wałek sterownika jest obracany, jego segmenty są połączone ze stałymi stykami zamontowanymi na pręcie izolacyjnym. Stałe styki typu palcowego zakończone są łatwo wymienialnymi „krakerami”. W wyniku połączenia styków ruchomych ze stałymi, w sterowanym obwodzie dokonuje się niezbędnych przełączeń. Sterownik krzywkowy składa się z zestawu elementów stycznikowych, które zamykają się i otwierają za pomocą podkładek krzywkowych umieszczonych na wale sterownika. Dla lepszego gaszenia łuku każdy element stykowy sterownika wyposażony jest w indywidualne urządzenie do gaszenia łuku. Styki sterowników krzywkowych mają większą zdolność wyłączania niż styki sterowników bębnowych i pozwalają na większą liczbę przełączeń (do 600 przełączeń na godzinę). 86. METODY URUCHAMIANIA SILNIKÓW Silniki asynchroniczne można uruchamiać przy pełnym napięciu (rozruch bezpośredni) i przy obniżonym napięciu. Rozruch bezpośredni odbywa się za pomocą przełączników nożowych, przełączników, przełączników wsadowych, rozruszników magnetycznych, styczników i sterowników. Podczas rozruchu bezpośredniego do silnika podawane jest pełne napięcie sieciowe. Wadą tej metody rozruchu są duże prądy rozruchowe, które są 27 razy większe niż prądy znamionowe silników. Najprostszy jest bezpośredni rozruch silników asynchronicznych z wirnikiem klatkowym. Uruchamianie i zatrzymywanie takich silników odbywa się poprzez włączenie lub wyłączenie przełącznika nożowego itp. Rozruch silników asynchronicznych z wirnikiem fazowym odbywa się za pomocą reostatu rozruchowego połączonego z uzwojeniem wirnika za pomocą pierścieni i szczotek. Przed uruchomieniem silnika możesz upewnić się, że opór reostatu rozruchowego jest w pełni wprowadzony. Pod koniec rozruchu reostat jest płynnie usuwany i zwierany. Obecność rezystancji czynnej w obwodzie wirnika podczas rozruchu prowadzi do zmniejszenia prądu rozruchowego i wzrostu momentu rozruchowego. Aby zmniejszyć prądy rozruchowe silników asynchronicznych, zmniejsza się napięcie dostarczane do uzwojenia stojana silnika. Można również zmniejszyć napięcie dostarczane do silnika, a jednocześnie zmniejszyć prąd rozruchowy silnika za pomocą autotransformatora. Podczas rozruchu autotransformatory obniżają napięcie o 50-80%. Jedną z głównych wad silników synchronicznych jest trudność ich uruchomienia. Rozruch silników synchronicznych może odbywać się za pomocą pomocniczego silnika rozruchowego lub za pomocą rozruchu asynchronicznego. Jeżeli wirnik silnika synchronicznego o wzbudzonych biegunach zostanie obrócony przez inny, pomocniczy silnik do prędkości obrotowej pola stojana, to bieguny magnetyczne stojana, współdziałając z biegunami wirnika, spowodują dalszy, niezależny obrót wirnika bez pomocy z zewnątrz, zsynchronizowane z polem stojana, czyli synchronicznie. Do rozruchu liczba par biegunów silnika indukcyjnego musi być mniejsza niż liczba par biegunów silnika synchronicznego, ponieważ w tych warunkach pomocniczy silnik asynchroniczny może rozpędzić wirnik silnika synchronicznego do prędkości synchronicznej. Złożoność rozruchu i konieczność zastosowania silnika pomocniczego są istotnymi wadami tego sposobu rozruchu silników synchronicznych. Dlatego obecnie jest rzadko używany. Aby zrealizować asynchroniczny rozruch silnika synchronicznego, w nabiegunnikach biegunów wirnika umieszcza się dodatkowe zwarte uzwojenie. Ponieważ podczas rozruchu w uzwojeniu wzbudzenia silnika indukowana jest duża siła elektromotoryczna, ze względów bezpieczeństwa jest ona zamykana przełącznikiem nożowym na rezystancję. Po włączeniu napięcia sieci trójfazowej w uzwojeniu stojana silnika synchronicznego powstaje wirujące pole magnetyczne, które przechodząc przez zwarte uzwojenie osadzone w nabiegunnikach wirnika indukuje w nim prądy. Prądy te, oddziałując z polem wirującym stojana, spowodują obrót wirnika. Gdy wirnik osiągnie większą liczbę obrotów, przełącznik przełącza się tak, że uzwojenie wirnika jest podłączone do sieci napięcia stałego. Wadą rozruchu asynchronicznego jest duży prąd rozruchowy (5-7-krotność prądu roboczego). 87. STEROWANIE PRĘDKOŚCIĄ OBROTOWĄ SILNIKÓW ELEKTRYCZNYCH Prędkość obrotową silników elektrycznych prądu stałego można kontrolować, zmieniając napięcie dostarczane do silnika lub zmieniając wielkość strumienia magnetycznego silnika. Zmianę wielkości napięcia dostarczanego do twornika silnika można wykonać poprzez szeregowe połączenie zmiennej rezystancji sterującej z twornikiem silnika lub połączenie uzwojeń tworników kilku silników szeregowo i równolegle. Najczęściej stosowaną metodą sterowania prędkością jest zmiana wielkości strumienia magnetycznego silnika. W tym celu w obwód uzwojenia wzbudzenia silnika znajduje się reostat, który umożliwia szeroką i płynną regulację prędkości silnika. Prędkość obrotowa silników asynchronicznych jest kontrolowana jedną z poniższych metod. 1. Zmiana liczby biegunów silnika. Aby móc zmienić liczbę par biegunów silnika, stojan jest wykonany albo z dwoma niezależnymi uzwojeniami, albo z jednym uzwojeniem, które można przełączyć na inną liczbę biegunów. Ponowne połączenie uzwojeń stojana odbywa się za pomocą specjalnego urządzenia - kontroler. Dzięki tej metodzie regulacja prędkości silnika odbywa się skokami. Regulację prędkości silnika poprzez zmianę liczby biegunów można wykonać tylko w przypadku silników asynchronicznych z wirnikiem klatkowym. Zwarty wirnik może pracować z dowolną liczbą biegunów stojana. Wręcz przeciwnie, wirnik silnika z uzwojeniem fazowym może normalnie pracować tylko z określoną liczbą biegunów stojana. W przeciwnym razie uzwojenie wirnika również musiałoby zostać przełączone, co spowodowałoby duże komplikacje w obwodzie silnika. 2. Zmień częstotliwość prądu przemiennego. Dzięki tej metodzie częstotliwość prądu przemiennego dostarczanego do uzwojenia stojana silnika jest zmieniana za pomocą specjalnego generatora. Korzystne jest dostosowanie zmiany częstotliwości prądu, gdy istnieje duża grupa silników, które wymagają wspólnej płynnej regulacji prędkości. 3. Wprowadzenie rezystancji do obwodu wirnika. Podczas pracy silnika do obwodu uzwojenia wirnika wprowadzany jest opór reostatu regulacyjnego. Ta metoda ma zastosowanie tylko do silników z wirnikiem fazowym. 4. Sterowanie za pomocą dławików nasycenia. Jednofazowy dławik nasycający ma dwa uzwojenia: jedno jest podłączone do obwodu prądu przemiennego, drugie, zwane uzwojeniem sterującym lub polaryzacyjnym, jest podłączone do źródła napięcia stałego (prostownika). Wraz ze wzrostem prądu w uzwojeniu sterującym układ magnetyczny cewki indukcyjnej nasyca się, a rezystancja indukcyjna uzwojenia prądu przemiennego maleje. Poprzez uwzględnienie dławików w każdej fazie silnika asynchronicznego i zmianę prądu uzwojenia sterującego możliwa jest zmiana rezystancji w obwodzie stojana silnika, a co za tym idzie prędkości obrotowej samego silnika. Do uruchamiania silników prądu stałego dużej mocy, a także do szerokiej regulacji prędkości obrotowej silników, stosuje się schemat „generator - silnik”, w skrócie G - D. System G - D umożliwia przeprowadzanie miękkich start i szeroka regulacja prędkości obrotowej silnika. 88. BATERIE Akumulatory są wyposażone w baterie ołowiowo-kwasowe lub alkaliczne, z których te pierwsze są najczęściej stosowane. Akumulator stacjonarnych akumulatorów kwasowo-ołowiowych składa się z akumulatorów typu C (stacjonarne dla trybów długiego rozładowania) lub SC (stacjonarne dla trybów krótkiego rozładowania). Akumulatory SK różnią się od akumulatorów typu C wzmocnionymi biegunami łączącymi. Liczby po oznaczeniu literowym tych akumulatorów charakteryzują ich pojemność, prądy rozładowania i ładowania. Baterie typu C są przeznaczone do rozładowywania się przez 3 do 10 godzin; maksymalny dopuszczalny prąd rozładowania 3-godzinnego wynosi 9 A. Akumulatory SC mogą być rozładowywane w krótszym czasie - do 1 godziny; maksymalny dopuszczalny jednogodzinny prąd rozładowania wynosi 18,5 A. Krótkotrwały prąd rozładowania (nie dłużej niż 5 s) nie powinien przekraczać 250% trzygodzinnego prądu rozładowania dla akumulatorów typu C i 250% jednogodzinnego prądu rozładowania dla akumulatorów typu SK. Podczas ładowania dopuszczalny jest maksymalny prąd ładowania: 9 A dla akumulatorów typu C i 11 A dla akumulatorów typu CK. Wartość pojemności podana dla każdego typu akumulatora różni się znacznie w zależności od wielkości prądu rozładowania i trybu rozładowania. Do akumulatorów stacjonarnych stosuje się akumulatory kwasowo-ołowiowe pancerne typu SP i SPK (pancerne stacjonarne). Do akumulatorów przenośnych stosuje się akumulatory kwasowo-ołowiowe typu ST (rozrusznik). Baterie alkaliczne wyposażone są w baterie żelazowo-niklowe typu ZhN lub TGN. Numer baterii odpowiada jej nominalnej pojemności w amperogodzinach. Akumulatory są ładowane prądem normalnego trybu ładowania przez 6-7 h. Przyspieszone ładowanie dozwolone jest w następującym trybie: najpierw przez 2,5 h prądem dwukrotnie większym niż normalny, następnie przez 2 h prądem o normalnym wartość. W przypadku akumulatorów przenośnych stosuje się akumulatory żelazowo-niklowe 10 ZhN o napięciu 12,5 V; 4 ZhN-5 V; 5 ZhN-6,5 V. Podczas pracy bateryjnej napięcie każdego ogniwa spada. Jeśli nie podejmiesz specjalnych środków, napięcie szyny akumulatora również zmniejszy się. W związku z tym, gdy akumulator jest rozładowany, oprócz sprawnych akumulatorów należy podłączyć nowe elementy. Tak więc bateria składa się z wielu stale pracujących ogniw oraz kilku ogniw, które są włączane i wyłączane w zależności od potrzeb. Aparatura, za pomocą której zmienia się liczbę aktywnych ogniw baterii, nazywa się przełącznikiem elementarnym. W elektrowniach i podstacjach dostępne są następujące rodzaje obciążeń DC: 1) stałe obciążenie - lampki sygnalizacyjne i kontrolne na panelach sterowania, niektóre przekaźniki zabezpieczające i automatyki itp .; 2) obciążenie tymczasowe - występuje w przypadku awarii zasilania podstacji z przemiennym prądem trójfazowym; składa się z lamp oświetlenia awaryjnego i silników prądu stałego; 3) obciążenie krótkotrwałe - mechanizmy włączania elektrycznych siłowników przełączników, części przekaźników zabezpieczających i automatyki. 89. TRYB PRACY Z BATERII Istnieją dwa tryby pracy baterii: ładowanie-rozładowanie и ciągłe ładowanie. Tryb ładowania-rozładowania charakteryzuje się tym, że po naładowaniu akumulatora ładowarka wyłącza się i akumulator zasila obciążenie stałe (lampki alarmowe, urządzenia sterujące), obciążenie okresowo krótkotrwałe (napędy wyłączników elektromagnetycznych) oraz obciążenie awaryjne. Akumulator rozładowany do określonego napięcia jest ponownie podłączany do ładowarki, która podczas ładowania akumulatora jednocześnie zasila ładunek. W przypadku akumulatora pracującego zgodnie z metodą ładowania-rozładowania ładowanie wyrównawcze (doładowanie) odbywa się raz na trzy miesiące. Tryb stałego ładowania jest następujący. Akumulator jest stale doładowywany przez ładowarkę podrzędną, dzięki czemu w dowolnym momencie znajduje się w stanie pełnego naładowania. Obciążenia udarowe występujące w sieci prądu stałego są odbierane przez akumulator. Raz w miesiącu akumulator pracujący w trybie ładowania podtrzymującego należy ładować z ładowarki. Do realizacji trybu ładowania-rozładowania stosuje się obwód akumulatora z przełącznikiem dwuelementowym. Agregat prądotwórczy służy jako jednostka ładująca. Generator jest połączony z oponami za pomocą bezpieczników, wyłącznika nadprądowego z przekaźnikiem prądu wstecznego, amperomierza i przełącznika dwupozycyjnego. Maksymalna maszyna chroni generator przed przeciążeniem. Przekaźnik prądu wstecznego wyłącza generator, jeśli jego siła elektromotoryczna jest mniejsza niż napięcie na szynach akumulatorowych. Może się to zdarzyć, gdy prędkość generatora zostanie zmniejszona, napięcie prądu przemiennego zasilające silnik zostanie utracone, a także z innych powodów. Jeśli generator nie jest w tym czasie wyłączony, to po przejściu w tryb silnika stanie się obciążeniem akumulatora. Całkowita liczba akumulatorów podłączonych do akumulatora musi być taka, aby nawet ogniwa rozładowane do napięcia minimalnego zapewniały napięcie znamionowe na szynach akumulatora. Jeżeli obciążenie sieci jest znikome, jednostka może dostarczać prąd do sieci i jednocześnie ładować akumulator. Jednak pod koniec ładowania generator podaje napięcie większe niż to, przy którym zwykle pracuje sieć. Jeśli włączysz reostat do sieci, to ze względu na spadek napięcia w nim możesz zmniejszyć napięcie. Ale to jest nieekonomiczne. Prostym rozwiązaniem problemu jednoczesnej pracy generatora w sieci i na ładowaniu jest zastosowanie w obwodzie przełącznika dwuelementowego. Ta ostatnia umożliwia wykorzystanie różnicy między napięciem generatora a napięciem sieciowym do ładowania grupy akumulatorów podłączonych do wyłącznika. Baterie znajdują się w specjalnym pomieszczeniu w piwnicy lub na pierwszym piętrze budynku elektrowni lub podstacji. Pomieszczenie musi być suche, nienarażone na nagłe zmiany temperatury, drgania lub wibracje. Wejście do pokoju odbywa się przez przedsionek. Temperatura pomieszczenia na poziomie akumulatorów nie powinna być niższa niż 10o. Pomieszczenie baterii musi mieć wentylację nawiewno-wywiewną. 90. BEZPIECZEŃSTWO W URZĄDZENIACH ELEKTRYCZNYCH Praca przy instalacjach elektrycznych jest całkowicie bezpieczna, jeśli personel obsługujący ściśle przestrzega zasad obsługi technicznej i zasad bezpieczeństwa. W tym celu osoby, które zapoznały się z zasadami bezpieczeństwa i otrzymały certyfikaty sprawdzania wiedzy z przypisaniem grupy kwalifikacyjnej, mogą pracować przy instalacjach elektrycznych. Podstawowe wyposażenie ochronne nazywane są urządzenia, których izolacja niezawodnie wytrzymuje napięcie robocze instalacji i za pomocą których można dotykać części pod napięciem pod napięciem. Do głównych izolacyjnych urządzeń ochronnych w instalacjach dowolnego napięcia należą pręty izolacyjne do przełączania operacyjnego, do wykonywania pomiarów, do stosowania uziemienia i innych celów oraz zaciski izolacyjne do bezpieczników, a w instalacjach niskonapięciowych dodatkowo rękawice i rękawice dielektryczne oraz monter. narzędzie z izolowanymi uchwytami. Dodatkowymi środkami ochronnymi są takie urządzenia, które same nie mogą zapewnić ochrony przed porażeniem elektrycznym i służą wzmocnieniu działania głównych środków ochronnych, a także służą do ochrony przed napięciem dotykowym, napięciem krokowym i przepaleniem łuku elektrycznego. Dodatkowymi ochronnymi środkami izolacyjnymi w instalacjach wysokiego napięcia są: rękawice i rękawice dielektryczne, buty dielektryczne, maty i prowadnice gumowe, stojaki izolacyjne. We wszystkich operacjach wysokonapięciowych podstawowe wyposażenie ochronne powinno być używane w połączeniu z wtórnymi. Sprzęt ochronny, zarówno w użyciu, jak i na stanie, musi być ponumerowany, a jego stan musi być sprawdzany w określonych godzinach. Prace naprawcze i instalacyjne należy wykonywać przy wyłączonym sprzęcie. Jeśli instalacji nie można wyłączyć z tego czy innego powodu, to podczas pracy pod napięciem należy przestrzegać przepisów bezpieczeństwa przy użyciu urządzeń ochronnych (podkładki izolacyjne, rękawice gumowe, okulary itp.). Podczas pracy pod wysokim napięciem należy przestrzegać następujących środków ostrożności: 1) praca musi być wykonywana tylko przez grupę pracowników (co najmniej dwóch), tak aby jeden z nich mógł udzielić pomocy drugiemu w razie wypadku; 2) pracownicy muszą być dobrze odizolowani od podłoża; 3) podczas wykonywania pracy pracownicy nie powinni dotykać osób nieizolowanych, a także części metalowych; 4) przed rozpoczęciem pracy wszystkie urządzenia ochronne muszą być dokładnie sprawdzone przez samych pracowników. Przed przystąpieniem do prac w instalacjach i urządzeniach wysokonapięciowych należy przy pomocy odpowiednich przyrządów upewnić się, że nie ma napięcia w części instalacji, w której będą prowadzone prace. Następnie należy rozładować opony zbierające, kable transformatorów, sprawdzić je pod kątem zwarcia, zamknąć je i bezpiecznie uziemić. Autor: Kosareva O.A.
▪ Międzynarodowe prawo prywatne. Notatki do wykładów ▪ Ekonomia i socjologia pracy. Kołyska
Otwarto najwyższe obserwatorium astronomiczne na świecie
04.05.2024 Sterowanie obiektami za pomocą prądów powietrza
04.05.2024 Psy rasowe chorują nie częściej niż psy rasowe
03.05.2024
▪ sekcja serwisu Radio - dla początkujących. Wybór artykułu ▪ artykuł Biosfera i człowiek. Podstawy bezpiecznego życia ▪ artykuł Dlaczego korek pływa? Szczegółowa odpowiedź ▪ artykuł Zoolog, entomolog. Opis pracy ▪ artykuł Prosty generator RF. Encyklopedia elektroniki radiowej i elektrotechniki
Strona główna | biblioteka | Artykuły | Mapa stony | Recenzje witryn
www.diagram.com.ua |


 Zobacz inne artykuły Sekcja
Zobacz inne artykuły Sekcja 